

西门子PLC入门级应用实例:简易机械手控制
描述
进入正题:
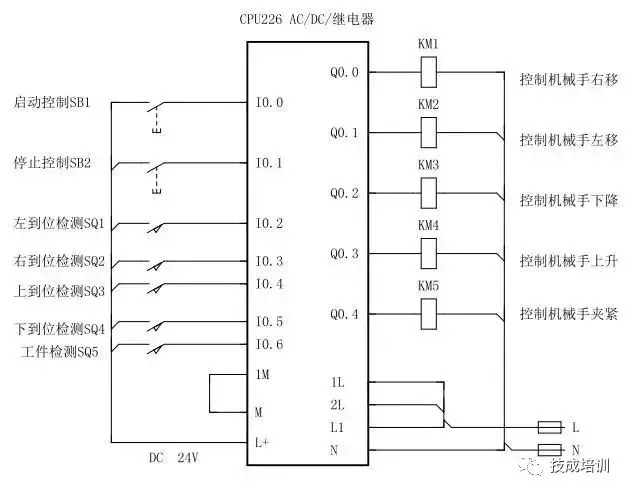
如上图所示,M1为控制机械手左右移动的电动机,M2为控制机械手上下升降的电动机,YV线圈用来控制机械手夹紧防松,SQ1为左到位检测开关,SQ2为右到位检测开关,SQ3为上到位检测开关,SQ4为下到位检测开关 ,SQ5为工件检测开关。
控制要求如下:
1.机械手要将工件从工位A移到工位B处;
2.机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQ1、SQ3均闭合;
3.若原点条件满足且SQ5闭合(工件A处有工件),按下启动按钮,机械手按“原点→下降→夹紧→上升→右移→下降→防松→上升→左移→原点”的步骤工作。
如下图所示:
编程前理顺动作如何转移:
定义符号表:
硬件的接线图:
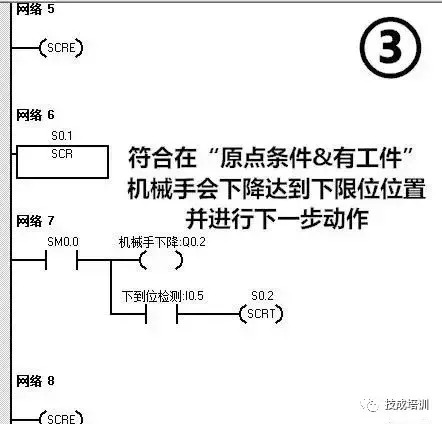
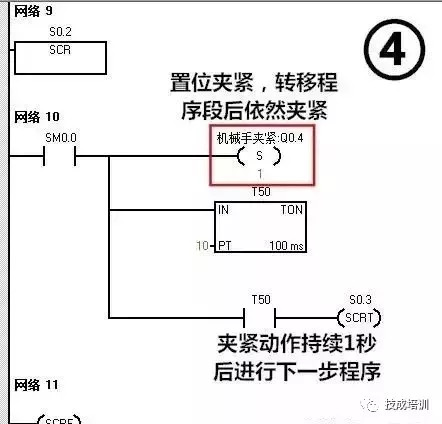
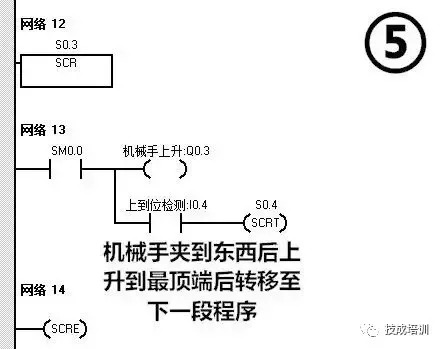
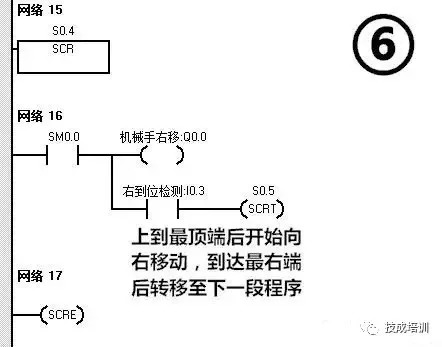
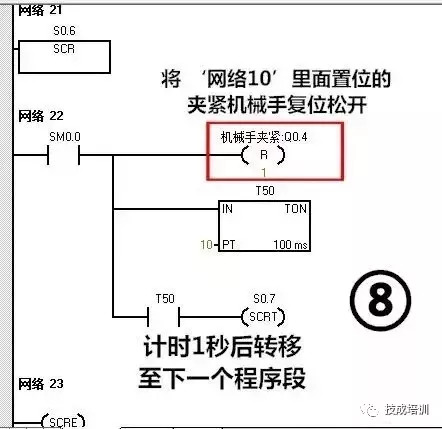
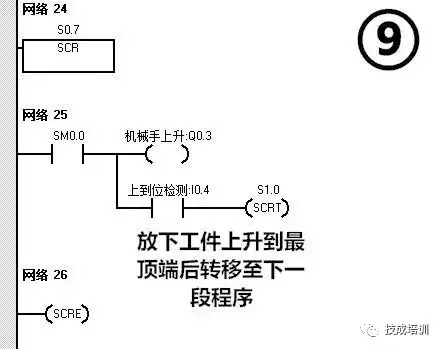
满足所有动作的程序如下:
下面我们一段一段分析这个机械手是如何工作的:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
PLC控制机械手设计2008-12-13 2531
-
西门子PLC实例电子教程2011-07-19 4012
-
基于PLC的机械手控制设计(毕业设计)2015-11-13 2119
-
西门子S7-200应用实例(入门经典)2016-03-22 1929
-
VB与西门子PLC通信程序2016-11-08 1109
-
西门子PLC(可编程逻辑控制器)编程实例项目例程2022-03-22 1171
-
西门子plc编程入门教程2017-11-14 47233
-
西门子PLC入门级应用实例,简易机械手的控制2018-04-23 17480
-
PLC经典实例:简易机械手的PLC控制线路与程序详解2022-12-05 35750
-
西门子200PLC步进控制(入门)2023-04-19 637
-
用三菱PLC控制机械手实例2023-04-20 6957
-
西门子PLC控制经典案例2023-06-27 4712
-
西门子S7-1200/1500PLC经典气动机械手程序2023-09-20 610
-
西门子S7-1200/1500PLC气动机械手程序2023-11-10 1753
-
西门子plc模块型号详解2024-06-11 5946
全部0条评论

快来发表一下你的评论吧 !
