

雷赛控制卡与步进驱动器如何连接
电子说
描述
本文主要是关于雷赛控制卡与步进驱动器的相关介绍,并着重对雷赛控制卡与步进驱动器的连接进行了详尽的阐述。
步进驱动器
步进电机驱动器是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和定位的目的。广泛应用于雕刻机、水晶研磨机、中型数控机床、脑电绣花机、包装机械、喷泉、点胶机、切料送料系统等分辨率较高的大、中型数控设备上。
步进驱动器相数
步进电机的相数是指电机内部的线圈组数,常用的有二相、三相、四相、五相步进电机。电机相数
不同,其步距角也不同,一般二相电机的步距角为1.8度、三相为1.2度、五相的为0.72度。在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足步距角的要求。如果使用细分驱动器,则相数将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。
保持转矩
驱动器细分后将对电机的运行性能产生质的飞跃,但是这一切都是由驱动器本身产生的,和电机及控制系统无关。在使用时,用户唯一需要注意的一点是步进电机步距角的改变,这一点将对控制系统所发的步进信号的频率有影响,因为细分后步进电机的步距角将变小,要求步进信号的频率要相应提高。以1.8度步进电机为例:驱动器在半步状态时步距角为0.9度,而在十细分时步距角为0.18度,这样在要求电机转速相同的情况下,控制系统所发的步进信号的频率在十细分时为半步运行时的5倍。
步进电机精度
一般步进电机的精度为步进角的3~5%。步进电机单步的偏差并不会影响到下一步的精度,因此步进电机精度不累积。
外表温度
步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降甚至于丢失。因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点。一般来说,磁性材料的退磁点都在130摄氏度以上,因此步进电机外表温度在80~90摄氏度完全正常。
常见问题
问题
噪声大
解决方法
A、如步进电机正好工作在共振区,可通过改变减速比提高步进电机运行速度。
B、采用带有细分功能的驱动器,这是最常用的,最简便的方法。因为细分型驱动器电机的相电流变化较半步型平缓。
C、换成步距角更小的步进电机,如三相或五相步进电机,或两相细分型步进电机。
D、换成直流或交流伺服电机,几乎可以完全克服震动和噪声,但成本较高。
E、在电机轴上加磁性阻尼器,市场上已有这种产品,但机械结构改变较大。
雷赛控制卡与步进驱动器如何连接
为了帮助使用者更好地了解雷泰公司运动控制卡、步进电机驱动器的特点,掌握运动控制卡与步进驱动器的连接方法,本文主要概述了脉冲输出模式、脉冲输出驱动方式的概念,讲述了运动控制卡与步进驱动器的连接方法,并对几个典型的故障案例进行了分析,指导使用者自行排查问题,完成自动控制系统构建。
一、脉冲输出模式与脉冲输出驱动方式
1、 脉冲输出模式
雷泰运动控制卡支持两种脉冲输出模式:一是单脉冲(脉冲+方向),一种是双脉冲(CW+CCW),可以通过调用运动控制卡的底层函数进行设定。
图1-2 双脉冲模式脉冲输出
2、脉冲输出驱动方式
雷泰运动控制卡支持两种脉冲输出方式:一是单端输出,一是差分输出,可以通过运动控制卡上的跳线开关进行选择。
二、雷泰运动控制卡与步进电机驱动器的连接方法
雷泰运动控制卡与步进电机驱动器的连接方式只有两种:一是单端接法;一是差分接法。由于雷泰公司所有的运动控制卡对单端、差分接法都是支持的,因此,在实际应用中,具体采用哪种接线方法,只取决于电机驱动器的接口特点。
如雷赛公司步进电机驱动器M415B只支持单端接法,则运动控制卡(本文以雷泰运动控制卡DMC2410为例进行说明)与M415B的配线只能如
1、运动控制卡内部跳线设置为单端输出。
2、步进电机驱动器的公共端OPTO、PUL、DIR分别接控制卡的PC+5V(PUL+或DIR+),PUL-、DIR-。
雷赛公司步进电机驱动器MD556对单端接法、差分接法均支持,则运动控制卡与MD556的配线可以采用单端接法或差分接法(为了提高抗干扰能力,建议采用差分接法)。
1、运动控制卡内部跳线设置为差分输出。
2、步进电机驱动器的公共端PUL+、PUL-、DIR+、DIR-分别接控制卡的PUL+、PUL-、DIR+、DIR-。
1、运动控制卡内部跳线设置为单端输出。
2、步进电机驱动器的公共端PUL+、PUL-、DIR+、DIR-分别接控制卡的PUL+、PUL-、DIR+、DIR-。
三、雷泰控制卡与驱动器连接的故障案例分析及其解决办法
1、 案例一
现象:
无论运动控制卡给步进驱动器发送正向脉冲还是负向脉冲,电机都能跑,但只往一个方向运动,
原因:
根据故障现象可以判断:运动控制卡的脉冲输出模式为单脉冲,驱动器为双脉冲模式。运动控制卡的脉冲输出模式与驱动器的脉冲接收模式不一致。因此,当控制卡发正向脉冲,如图3-1所示,脉冲从控制卡的PUL端输出,由于控制卡的PUL与驱动器的PUL相连,这时驱动器的PUL端有脉冲输入,则电机正转。当控制卡发负向脉冲,如图3-2所示,脉冲还是从控制卡的PUL端输出,然后从驱动器的PUL端输入,则电机还是按原来的方向运动。
解决办法:
把运动控制卡的脉冲输出模式改为双脉冲或把驱动器的脉冲模式设置为单脉冲模式。让控制卡的脉冲模式与驱动器的脉冲模式保持一致。
2、案例二
现象:
运动控制卡给驱动器发送正向脉冲,电机正转正常。运动控制卡给驱动器发送负向脉冲,电机不能运动。
原因:
根据故障现象可以判断:运动控制卡的脉冲输出模式为双脉冲,驱动器为单脉冲模式。运动控制卡的脉冲输出模式与驱动器的脉冲接收模式不一致。因此,当控制卡发正向脉冲,如图3-3所示,脉冲从控制卡的PUL端输出,由于控制卡的PUL与驱动器的PUL相连,这时驱动器的PUL端有脉冲输入,则电机正转。当控制卡发负向脉冲,如图3-4所示,脉冲从控制卡的DIR端输出,然后从驱动器的DIR端输入,驱动器的PUL端没有接收到脉冲输入,则电机停止不动。
解决办法:
让控制卡的脉冲模式与驱动器的脉冲模式保持一致。
3、案例三
现象:
运动控制卡给驱动器发送正向脉冲,电机抖动。运动控制卡给驱动器发送负向脉冲,电机反转正常。
原因:
经查实:运动控制卡与驱动器的脉冲模式均为单脉冲模式,控制卡的脉冲输出与驱动器的脉冲输入模式是匹配的;但驱动器的需要单端驱动方式输入,而运动控制卡的跳线设置为差分输出,控制卡与驱动器的脉冲输出/输入驱动方式不一致。因此,当控制卡发正向脉冲时,如图3-5所示,驱动器的PUL和DIR都有脉冲输入,电机抖动。当控制卡发负向脉冲时,如图3-6所示,驱动器的PUL输入脉冲信号,DIR输入电平信号,电机运转正常。
解决办法:
通过板卡上的跳线开关,把运动控制卡设置为单端输出。
浅谈雷赛控制卡应用程序开发
雷赛智能一贯坚持“硬件是质量的保证,软件是应用的基础”的准则,在提高硬件质量的同时,不断强化软件系统的完善,不断加强对客户开发应用系统的支持,努力做到产品的可靠、易用。这里就客户使用雷赛开发应用软件过程做以简单指导,如有更多需求,请与我公司联络以获得更好的技术支持。
使用雷赛运动控制卡的设备控制系统结构如图3-1所示:
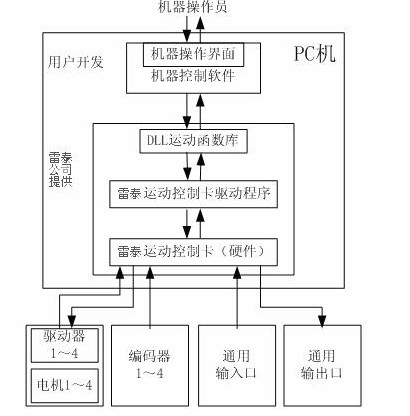
图1 基于雷赛运动控制卡的设备控制系统结构
从上面的结构图可以看出,控制系统的工作原理可以简单描述为:
1. 操作员的操作信息通过操作界面(包括显示屏和键盘)传递给系统控制软件;
2. 系统控制软件将操作信息转化为运动参数并根据这些参数调用DLL库中运动函数;
3. 运动函数调用雷赛运动控制卡驱动程序发出控制指令给控制卡;
4. 雷赛运动控制卡再根据控制指令发出相应的驱动信号(如脉冲、方向信号)给驱动器及电机、读取编码器数据、读/写通用输入/输出口。
用户在开发应用软件(即系统控制软件)的过程中所需要做的就是针对上面所说的第1步和第2步进行编程。雷赛公司已提供支持各款运动控制卡的硬件驱动程序和DLL运动函数库,包括控制卡初始化函数、单轴及多轴控制函数、输入/输出脉冲模式设置函数等许多函数。这些函数提供了所有与运动控制相关的功能,使用极为方便。用户不需要更多了解硬件威廉希尔官方网站 的细节以及运动和插补的计算细节,就能够使用C、C++、Visual Basic等程序语言调用这些函数来快速开发出自己的应用软件。
用户编写的系统控制软件的典型流程如图3-2所示:
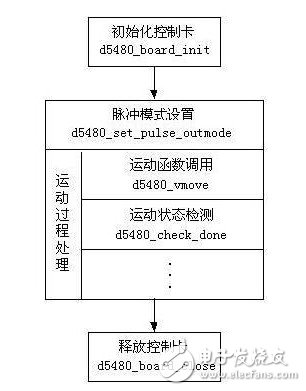
图2 系统控制软件的典型流程
我们以雷赛DMC5480卡为例,介绍在VB和VC环境下针对雷赛运动控制卡编程方法:(使用雷赛其他型号的控制卡,方法和步骤相同)
Visual Basic 6.0环境下的软件开发介绍
请确保DMC5480运动控制卡已经插入到你的计算机插槽中,已安装好驱动程序,并用Motion5480演示软件确认硬件系统工作正常。
安装好VB软件,但在开始编写DMC5480运动控制软件前,需要做下面几项工作:
1 建立自己的工作目录,如:d:\vbMotion(此目录名可以自己指定)。
2 将DMC5480.bas文件拷贝到该目录下(此文件在软件CD的module目录下可以找到)。
3 运行VB,并建立一个工程,然后保存此新建的工程在vbMotion目录中。
4 按下述步骤,将运动函数库链接到你的工程项目中:
在VB编译器的“工程(P)”菜单中选择“添加模块”;
选择“现存”;
选择“DMC5480.bas”;
选择“确定”。
当您将运动函数链接到你的工程项目中后,就可以象调用其它API函数一样直接调用运动函数,每个函数的具体功能,请参考软件手册中的 “运动函数说明”,当然还可以打开模块文件DMC5480.bas了解每个函数的具体定义。
在编程过程中,您可以参阅我们提供的运动函数编程实例:我们提供了VB的编程实例源代码,存放在光盘的Samples目录下(也可以通过网站下载)。只要您将控制卡及其驱动软件安装好,即可直接运行这些源代码。
Visual C++ 6.0环境下的软件开发介绍
请确保DMC5480运动控制卡已经插入到你的计算机插槽中,安装好驱动程序,Motion5480演示软件和VC软件,在调用DMC5480运动函数之前,需要做下面几项工作:
1. 启动Motion5480演示软件,进行运动控制卡控制功能的简单测试,如:单轴定长运动等,以确定DMC5480运动控制卡软硬件安装正常。
2. 运行VC,并建立一工程,将工程命名为vcMotion(注:此工程名可以自己指定);
3. 将DMC5480.lib和DMC5480.h文件拷贝到该目录下(此文件在module目录下);
4. 将运动函数链接到你的工程项目中,将DMC5480.lib加入到工程中;
5. 在调用运动函数的文件头部代码中加入#include “DMC5480.h”语句。
当你将运动函数链接到你的项目中后,你就可以象调用其它API函数一样,调用运动函数,每个函数的具体功能,请软件手册中的“运动函数说明”。当然,还可以打开头文件DMC5480.h了解每个函数的具体定义。
在编程过程中,您可以参阅我们提供的运动函数编程实例。我们提供的VC的编程实例源代码,存放在光盘的Samples目录下(也可以通过网站下载)。只要您将控制卡及其驱动软件安装好,即可直接运行这些源代码。
结语
关于雷赛控制卡与步进驱动器的相关介绍就到这了,如有不足之处欢迎指正。
-
labview无法控制伺服运动控制卡2017-03-02 0
-
雷赛DMC1380运动控制卡能被检测到,但无法控制电机运行?2018-10-26 0
-
DMC2410控制卡用labview2014编程时,控制卡的初始化状态读取不到,读不到卡,不知是什么原因?2019-09-29 0
-
研华PCI1240U运动控制卡 雷赛ACS806驱动器2020-02-25 0
-
运动控制卡做上位机,控制伺服驱动器时,伺服驱动器需要设置什么?2020-03-10 0
-
求购欧姆龙CJ系列CPU》***回收西门子伺服回收全新雷赛控制卡2021-04-24 0
-
求购雷赛运动控制卡江苏地区回收整套伺服驱动回收施耐德模块2021-05-13 0
-
求购全新雷赛控制卡广州本地收购传感器回收全新伺服驱动全套回收2021-05-13 0
-
雷赛dm556驱动器说明书精选资料下载2021-07-08 0
-
基于C#的运动控制卡的马达控制 精选资料分享2021-07-20 0
-
Turbo PMAC控制卡步进电机2021-09-07 0
-
运动控制卡与伺服驱动器简介2021-10-09 0
-
高价回收基恩士视觉系统回收SMC雷赛控制器控制卡2021-11-27 0
-
多轴步进电机插补控制器及多轴步进电机运动控制卡控制方法pdf资料分享2018-04-11 1320
-
利用运动控制卡搭建运动控制平台2023-03-10 480
全部0条评论

快来发表一下你的评论吧 !
