

一份CS230课程知识点的归纳总结,在Reddit上引发热议
电子说
描述
吴恩达斯坦福大学CS230《深度学习》课程内容归纳总结放出,全文干货。对于不方便正式上课的同学们来说,相信这份核心内容总结一定会对你有所帮助。
作为全球计算机四大名校之一,斯坦福大学的CS230《深度学习》课程一直受到全球计算机学子和从业人员的热烈欢迎。
CS230授课人为全球著名计算机科学家吴恩达和他的助教Kian Katanforoosh。
日前,MIT的Afshine Amidi 和斯坦福大学的Shervine Amidi在博客上整理了一份CS230课程知识点的归纳总结,在Reddit上引发热议。
评论网友纷纷表示喜大普奔,对于没有条件上课或者没赶上授课时间的人来说,看看这份总结贴也能获益颇丰。
这份总结提要基本遵循CS230的授课思路和流程,分三大方面由浅入深地介绍了深度学习的基本概念、网络模型、研究和实验操作方法等。三部分内容分别为:卷积神经网络、递归神经网络、提示与技巧。
本文主要介绍这份总结的第一部分,即CNN部分的内容,后两部分RNN、窍门与技巧部分,读者可自行参看Github上放出的资源:
卷积神经网络(CNN)
https://stanford.edu/~shervine/teaching/cs-230/cheatsheet-convolutional-neural-networks
递归神经网络(RNN)
https://stanford.edu/~shervine/teaching/cs-230/cheatsheet-recurrent-neural-networks
技巧与窍门
https://stanford.edu/~shervine/teaching/cs-230/cheatsheet-deep-learning-tips-and-tricks
囊括全部内容的“超级VIP”pdf下载
https://github.com/afshinea/stanford-cs-230-deep-learning/blob/master/super-cheatsheet-deep-learning.pdf
卷积神经网络结构:卷积层、池化层、全连接层
传统的卷积神经网络由输入图像、卷积层、池化层和全连接层构成。
卷积层(CONV):使用过滤器执行卷积操作,扫描输入大小。它的超参数包括滤波器的Size和Stride。结果输出O称为特征映射或激活映射。
池化层(POOL)是一种下采样操作,通常在卷积层之下使用,该卷积层执行一些空间不变性。其中最大池化和平均池化属于特殊操作,分别采用最大值和平均值。
全连接层(FC)在平坦输入上运行,每个输入都连接到所有神经元。如果全连接层存在,通常位于网络体系结构的末尾,可用于优化诸如分类评分等目标。
过滤器超参数
过滤器维度: 大小为F×F的过滤器应用在C channel上维度为F×F×C。
Stride:对于卷积和池化操作而言,Stride表示每次操作后窗口移动的像素数量。
Zero-padding表示对输入边界的每一端加入P个零的过程。这个值可以通过下图中所示的三个方式手动指定,也可以自动设置。
超参数的调整
卷积层中的超参数兼容性:记输入量长度为I,过滤器长度为F,补零数量为P,Stride量为S,则该维度下特征映射的输出大小O可用下式表示:
理解模型的复杂度:为了获取模型复杂度,常常可以通过相应架构下的参数数量来达到这一目标。在给定的卷积神经网络层中,该过程如下图所示:

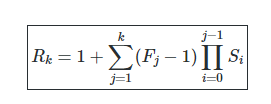
感受野:层K上的感受野区域记为Rk×Rk,即第K次激活映射可以“看见”的每个输入像素。若层j上的过滤器大小为Fj,层i上的Stride值为Si,且S0=1,则层k上的感受野可以由下式计算出:
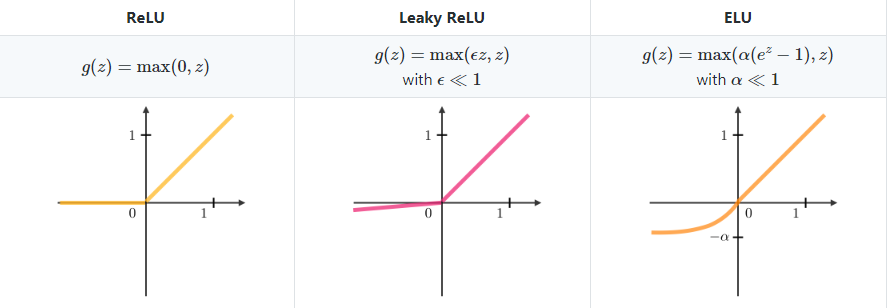
常用激活函数
整流线性单元 : 整流线性单元层(ReLU)是激活函数g,作用于所有元素。它旨在为网络引入非线性特征,其变量总结在下图中:
Softmax:可以视作一个作用于网络架构末端通用逻辑函数,输入为分数向量,输出为概率向量。其定义如下:

物体检测
模型的类型:
有三类主要的物体识别算法,其预测的性质是不同的。如下表的描述:
三类物体识别算法
检测(Detection):
在对象检测的上下文中,根据我们是仅想要定位对象还是想要在图像中检测更复杂的形状,可以使用不同的方法。下面总结了两个主要的方法:
边界框检测和特征点检测
Intersection over Union:
Intersection over Union(交并比),也称为IoU,是一种量化预测边界框 在实际边界框
在实际边界框 上的正确定位的函数。它的定义是:
上的正确定位的函数。它的定义是:

备注:IoU∈[0,1]。按照惯例,如果IoU(Bp,Ba)⩾0.5,预测边界框Bp被认为是合理的。
Anchor boxes:
Anchor boxing是一种用于预测重叠边界框的技术。在实际应用中,网络可以同时预测多个box,其中每个box的预测被约束具有给定的一组几何特性。例如,第一个预测可能是给定形状的矩形框,而第二个预测可能是另一个形状不同的矩形框。
Non-max suppression:
Non-max suppression技术旨在通过选择最具代表性的对象来删除同一对象的重叠边界框。在删除了概率预测低于0.6的所有框之后,在剩余框中重复以下步骤:
对于一个给定的类,
步骤1:选择具有最大预测概率的框。
步骤2:删除任何与前一个框的IoU⩾0.5的框。
YOLO - You Only Look Once,这是一种对象检测算法,它执行以下步骤:
步骤1:将输入图像分割成G×G的网格。
步骤2:对于每个网格单元,运行一个CNN网络,预测下面公式中的y:

其中 是检测对象的概率,
是检测对象的概率, 是检测到的边界框的属性,
是检测到的边界框的属性, 是检测到的p类的one-hot representation,k是anchor boxes的数量。
是检测到的p类的one-hot representation,k是anchor boxes的数量。
步骤3:运行 non-max suppression 算法,删除任何可能的重复重叠边界框。
R-CNN
Region with Convolutional Neural Networks (R-CNN) 是一种对象检测算法,它首先对图像进行分割以找到潜在的相关边界框,然后运行检测算法,在那些边界框中找到最可能的对象。
备注:虽然原始算法计算成本高且速度慢,但新的架构能让算法运行得更快,例如Fast R-CNN和Faster R-CNN。
面部验证和识别
模型类型:下面总结了两种主要类型的模型:
One Shot Learning
One Shot Learning是一种面部验证算法,它使用有限的训练集来学习相似函数,该函数量化两个给定图像的差异。应用于两个图像的相似度函数通常被标注为d(image 1,image 2).。
Siamese Network
Siamese Networks的目的是学习如何编码图像,然后量化不同的两个图像。对于给定的输入图像 ,编码输出通常记为
,编码输出通常记为
Triplet loss
Triplet loss ℓ是在图像A (anchor), P (positive) 和N (negative)这三个图像的嵌入表示上计算的损失函数。 anchor和positive示例属于同一个类,negative示例属于另一个类。通过调用 margin参数,该损失定义如下:
margin参数,该损失定义如下:


神经风格迁移
动机:
神经风格转移(neural style transfer)的目标是基于给定内容C和给定风格S,生成图像G。
激活:
在给定层l中,激活被标记为 ,并且具有维度
,并且具有维度
内容成本函数(Content cost function)
内容成本函数 用于确定生成的图像G与原始内容图像C的不同之处。它的定义如下:
用于确定生成的图像G与原始内容图像C的不同之处。它的定义如下:

风格矩阵(Style matrix)
style matrix 是一个Gram矩阵,其中每个元素
是一个Gram矩阵,其中每个元素 量化了通道k和k'的相关性。它是根据激活
量化了通道k和k'的相关性。它是根据激活

风格成本函数(Style cost function )
风格成本函数 用于确定生成的图像G与风格S的不同之处。它的定义如下:
用于确定生成的图像G与风格S的不同之处。它的定义如下:

总成本函数(Overall cost function)
总成本函数的定义是内容和风格成本函数的组合,由参数α, β加权,如下所示:

使用计算技巧的架构
生成对抗网络(Generative Adversarial Network)
生成对抗网络,也称为GAN,由生成模型和判别模型组成,其中生成模型旨在生成最真实的输出,这些输出将被用于区分生成图像和真实图像。
ResNet(Residual Network)
残差网络架构(也称为ResNet),使用具有大量层的residual blocks来减少训练误差。 residual blocks 具有以下特征:

Inception Network
该架构使用 inception modules,目的是尝试不同的卷积,以通过特征的多样化来提高其性能。具体来说,它使用1×1卷积技巧来限制计算负担。
-
单片机知识点2013-06-19 0
-
C语言程序小知识点总结2021-11-05 0
-
计算机组成原理考研知识点归纳2010-04-13 1922
-
高一数学知识点总结2016-02-23 789
-
高二数学知识点总结2016-02-23 684
-
Python的知识点总结详细说明2020-09-29 1150
-
嵌入式知识点总结2021-07-30 1005
-
人教版八年级生物下册知识点归纳总结2021-09-13 668
-
开关电源模块知识点总结2021-09-22 1145
-
数字信号处理知识点总结2022-08-15 619
-
C语言最重要的知识点2023-02-16 423
-
数字威廉希尔官方网站 知识点总结2023-05-30 4865
-
电阻的相关知识点2023-09-13 1733
-
机器视觉与视觉检测知识点的归纳2023-10-07 227
-
模拟电子技术知识点问题总结概览2024-05-08 1165
全部0条评论

快来发表一下你的评论吧 !
