
资料下载


如何使用FPGA进行快速浮、定点PID控制器的研究与实现
分享资料个
提出了基于FPGA 的快速PID 控制器技术,采用流水线运算方法,具有高速、稳定、精确的实时控制性能,实现了速度和资源的优化匹配。研究并分析了位置式PID 不同算式的特点,完成了浮、定点PID 控制器的硬件实现,提出了溢出、饱和等问题的解决方法,单次运算时间分别达480 ns、120 ns,并对两种控制器的性能进行了分析和比较。设计了单精度浮点数和16 位定点数之间的转换控制器,增强了浮点PID 的普适性。设计了基于FPGA 的全数字逆变焊接电源的实验平台。仿真和实验证明,浮、定点PID控制器均可在强电磁干扰的环境中高速、准确、可靠地运行,具有广泛的实用性。
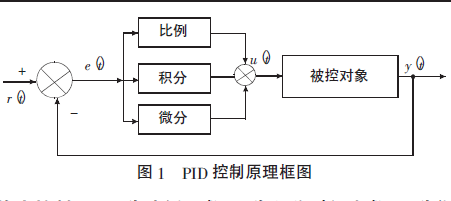
按偏差的比例、积分和微分进行控制的PID 算法是连续系统控制理论中技术最为成熟、应用最为广泛的一种控制技术。随着智能控制理论的发展,出现了诸如神经网络PID、模糊PID、小波PID 等许多改进的PID 算法,从理论上讲,它们能够弥补单纯PID 控制的不足,然而在实际工程应用中,PID 控制器因其结构简单、速度快、可靠性高,仍是绝大部分场合采取的有效过程和运动控制方法。
用模拟元器件实现的PID 调节器,受环境、温度等因素的影响较大,精度较低,而且硬件威廉希尔官方网站 一旦搭建完成,改动麻烦。数字式PID 具有抗干扰强、参数整定灵活等模拟控制器无法比拟的优点,在实际的生产过程中被普遍采用。目前采用单片机或DSP 实现PID 算法比较普遍,应用在一些性能要求不是很高的场合。然而无论是单片机或DSP,都采用软件进行编程,在速度和可靠性上有一定的局限和欠缺。该文提出了基于现场可编程门阵列FPGA 的通用数字PID 控制器设计,能够满足高速、高可靠性和精确性应用场合的严格要求。
立足于全数字逆变焊接电源的工程背景,采用位置式数字PID 算法,研究了不同算式的特点和应用范围,提出了基于流水线模式的快速PID 算法,并详细介绍了实现的思路和方法。通过程序流程图、功能框图和时序仿真对浮、定点PID 控制器的实现及其若干相关问题和解决方法进行了详细的介绍。在仿真成功的基础上,验证了所设计的定点和浮点PID 算法能够在焊接电源的强电磁干扰环境下可靠稳定地工作,实现电源内环控制的快速和高精度,大大提高了系统的动态性能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




