
资料下载


×
使用51单片机进行外部中断和串行口中断的资料和程序免费下载
消耗积分:1 |
格式:pdf |
大小:0.78 MB |
2019-04-23
刘芳
分享资料个
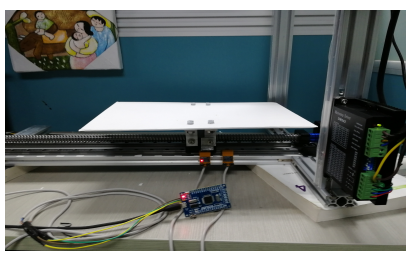
新搭了一个系统,用线激光进行实时三维重建,不用每次都判断位置开始拍照,加了两个接近开关,当步进电机向某一方向运行时,利用两个传感器确定需要拍照的时刻,同时通过串行口向电脑发送一个字符,电脑收到这个字符开始拍照。今天先把 keil端的程序弄上来,有时间再把串口通信的程序写一写。程序已经通过运行,如图所示:
利用串口调试工具试了一下完全可以,程序的思路大概就是设置了两个状态标志位flag0和flag1,当通过接近开关1时,p3.2 出现下降沿,此时设置flag0=1,当通过接近开关2时,p3.3出现下降沿,此时进入外部中断1,如果满足flag0=1,就设置 flag1=1,如果flag1=1,则向串口发送一串字符即可。当然这其中还需要相互制约,保证反方向进入时不会发送数据,具体一看程序就明白了。当然也可以使用外部中断计数器做。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




