

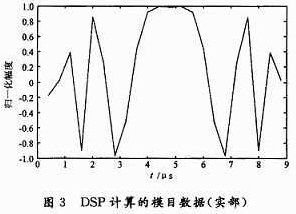
 ;μ为调频斜率;fo为载频;φo为初相。那么当雷达对空照射时,如果遇到目标,就会产生回波,回波是受目标调制了的发射信号,所以通过和发射信号相比较,就可获得目标的相关信息,在此仅考虑目标相对雷达匀速径向飞行的情况。当回波被雷达接收后,经过解调,得到的将是带有多普勒频移的线性调频信号,由于已假设目标沿径向匀速飞行,所以回波信号相对于发射信号来说,在相位上仅时间的一次项改变,即发生了多普勒频移。回波的时延反映目标的远近,幅度反映目标的散射截面积。
;μ为调频斜率;fo为载频;φo为初相。那么当雷达对空照射时,如果遇到目标,就会产生回波,回波是受目标调制了的发射信号,所以通过和发射信号相比较,就可获得目标的相关信息,在此仅考虑目标相对雷达匀速径向飞行的情况。当回波被雷达接收后,经过解调,得到的将是带有多普勒频移的线性调频信号,由于已假设目标沿径向匀速飞行,所以回波信号相对于发射信号来说,在相位上仅时间的一次项改变,即发生了多普勒频移。回波的时延反映目标的远近,幅度反映目标的散射截面积。
 举报
举报

 举报
举报



 ,再查表得到
,再查表得到 ,这样每个波束都要计算
,这样每个波束都要计算 ,属于重复计算,消耗了时间。对算法进行改进,改进后的算法为:先将每个CPI的波形,即
,属于重复计算,消耗了时间。对算法进行改进,改进后的算法为:先将每个CPI的波形,即 存于DSP内存中,当每个CPI脉冲到来时,根据系统控制字中CPI代码取出该CPI对应的基本波形,然后乘以
存于DSP内存中,当每个CPI脉冲到来时,根据系统控制字中CPI代码取出该CPI对应的基本波形,然后乘以 ,这样就可以降低运算量,节省运算时间;另外DSP的主频不再采用默认值(4倍频),而是将其设置为10倍频(DSP芯片为AD公司的ADSP-TS201),这样由于主频的提高,也加快了运算速度,节省了运算时间。通过采取这两条措施以后,DSP就能在一个FR时间内产生多波束信号,从而满足实时性要求。
举报
举报
,这样就可以降低运算量,节省运算时间;另外DSP的主频不再采用默认值(4倍频),而是将其设置为10倍频(DSP芯片为AD公司的ADSP-TS201),这样由于主频的提高,也加快了运算速度,节省了运算时间。通过采取这两条措施以后,DSP就能在一个FR时间内产生多波束信号,从而满足实时性要求。
举报
举报
更多回帖


