一、PWM简介
PWM是 Pulse Width Modulation 的缩写,中文意思就是脉冲宽度调制,简称脉宽调制。其实我们也可以这样理解,PWM是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM 进行编码。
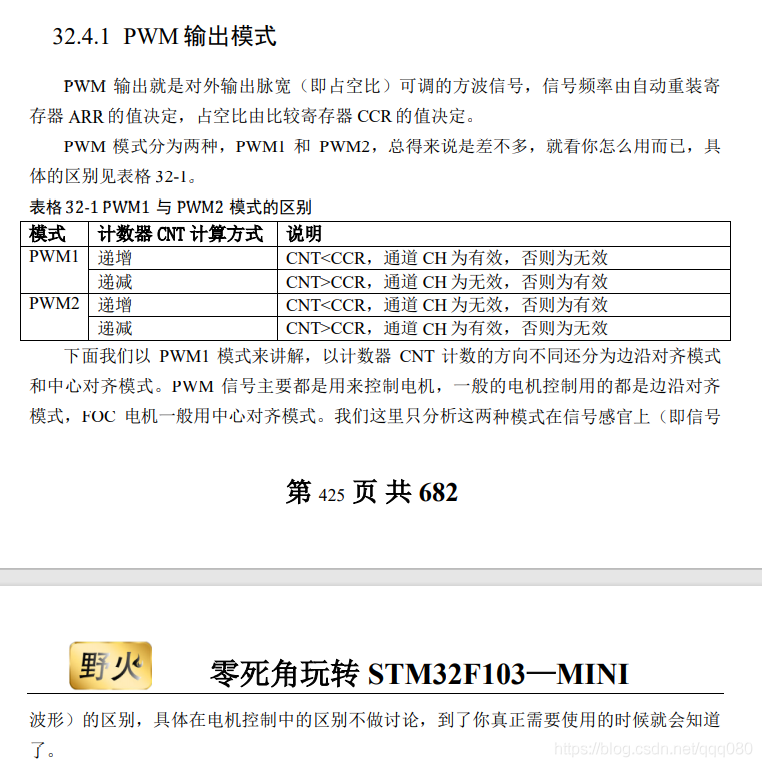 PWM模式根据计数器CNT计数方式,可分为边沿对齐模式和中心对齐模式。这些在野火资料里都有,不做介绍了。
二、实验步骤
1.示例
本文使用的是野火STM32F103-mini开发板资料1-程序源码_教程文档1《STM32库开发实战指南》(标准库源码)【优先学习】1-书籍配套例程-F103RCMINI32-TIM—高级定时器3-TIM—高级定时器-PWM输入捕获里面的代码。
主要代码为:
PWM模式根据计数器CNT计数方式,可分为边沿对齐模式和中心对齐模式。这些在野火资料里都有,不做介绍了。
二、实验步骤
1.示例
本文使用的是野火STM32F103-mini开发板资料1-程序源码_教程文档1《STM32库开发实战指南》(标准库源码)【优先学习】1-书籍配套例程-F103RCMINI32-TIM—高级定时器3-TIM—高级定时器-PWM输入捕获里面的代码。
主要代码为:
/* ---------------- PWM信号 周期和占空比的计算--------------- */
// ARR :自动重装载寄存器的值
// CLK_cnt:计数器的时钟,等于 Fck_int / (psc+1) = 72M/(psc+1)
// PWM 信号的周期 T = ARR * (1/CLK_cnt) = ARR*(PSC+1) / 72M
// 占空比P=CCR/(ARR+1)
/**
* @brief 通用定时器PWM输出初始化
* @param 无
* @retval 无
* @note
*/
static void ADVANCE_TIM_Mode_Config(void)
{
// 开启定时器时钟,即内部时钟CK_INT=72M
ADVANCE_TIM_APBxClock_FUN(ADVANCE_TIM_CLK,ENABLE);
/*--------------------时基结构体初始化-------------------------*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
// 自动重装载寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断
TIM_TimeBaseStructure.TIM_Period=ADVANCE_TIM_PERIOD;
// 驱动CNT计数器的时钟 = Fck_int/(psc+1)
TIM_TimeBaseStructure.TIM_Prescaler= ADVANCE_TIM_PSC;
// 时钟分频因子 ,配置死区时间时需要用到
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
// 计数器计数模式,设置为向上计数
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
// 重复计数器的值,没用到不用管
TIM_TimeBaseStructure.TIM_RepetitionCounter=0;
// 初始化定时器
TIM_TimeBaseInit(ADVANCE_TIM, &TIM_TimeBaseStructure);
/*--------------------输入捕获结构体初始化-------------------*/
// 使用PWM输入模式时,需要占用两个捕获寄存器,一个测周期,另外一个测占空比
TIM_ICInitTypeDef TIM_ICInitStructure;
// 捕获通道IC1配置
// 选择捕获通道
TIM_ICInitStructure.TIM_Channel = ADVANCE_TIM_IC1PWM_CHANNEL;
// 设置捕获的边沿
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
// 设置捕获通道的信号来自于哪个输入通道,有直连和非直连两种
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
// 1分频,即捕获信号的每个有效边沿都捕获
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
// 不滤波
TIM_ICInitStructure.TIM_ICFilter = 0x0;
// 初始化PWM输入模式
TIM_PWMIConfig(ADVANCE_TIM, &TIM_ICInitStructure);
// 当工作做PWM输入模式时,只需要设置触发信号的那一路即可(用于测量周期)
// 另外一路(用于测量占空比)会由硬件自带设置,不需要再配置
// 捕获通道IC2配置
// TIM_ICInitStructure.TIM_Channel = ADVANCE_TIM_IC1PWM_CHANNEL;
// TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Falling;
// TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_IndirectTI;
// TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
// TIM_ICInitStructure.TIM_ICFilter = 0x0;
// TIM_PWMIConfig(ADVANCE_TIM, &TIM_ICInitStructure);
// 选择输入捕获的触发信号
TIM_SelectInputTrigger(ADVANCE_TIM, TIM_TS_TI1FP1);
// 选择从模式: 复位模式
// PWM输入模式时,从模式必须工作在复位模式,当捕获开始时,计数器CNT会被复位
TIM_SelectSlaveMode(ADVANCE_TIM, TIM_SlaveMode_Reset);
TIM_SelectMasterSlaveMode(ADVANCE_TIM,TIM_MasterSlaveMode_Enable);
// 使能捕获中断,这个中断针对的是主捕获通道(测量周期那个)
TIM_ITConfig(ADVANCE_TIM, TIM_IT_CC1, ENABLE);
// 清除中断标志位
TIM_ClearITPendingBit(ADVANCE_TIM, TIM_IT_CC1);
// 使能高级控制定时器,计数器开始计数
TIM_Cmd(ADVANCE_TIM, ENABLE);
}
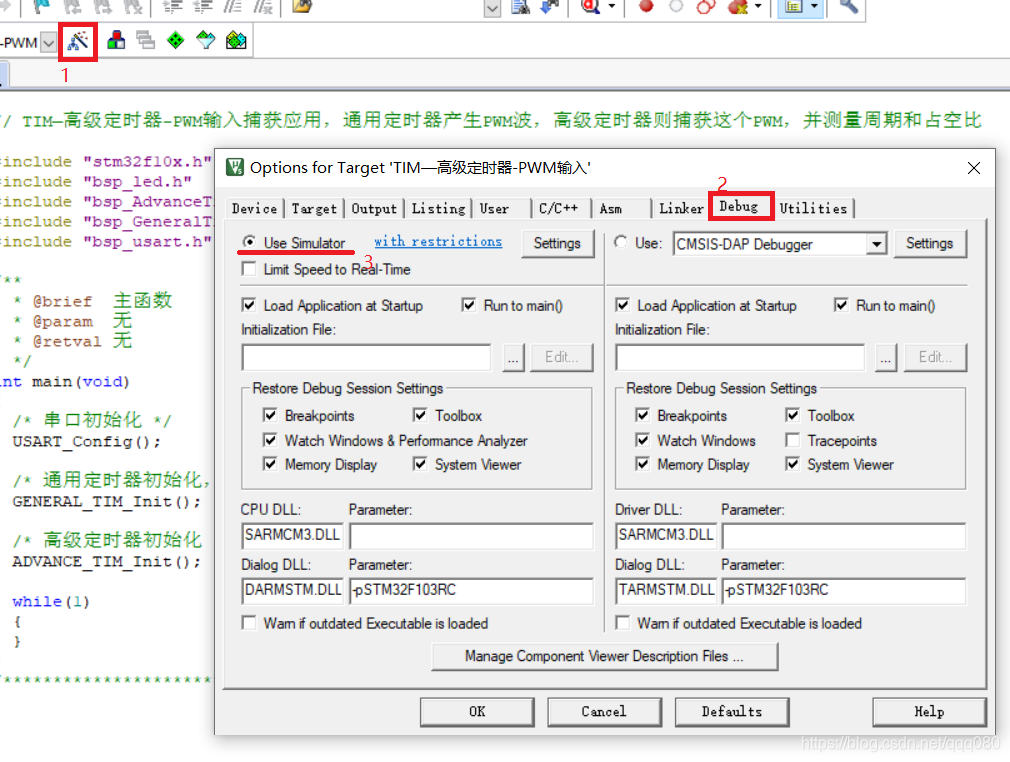
2.keil仿真
设置keil。
注意:Dialog DLL和Parameter里面的内容要和图片里的一致
 打开调试。
打开调试。
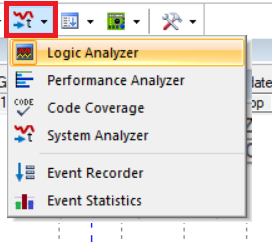
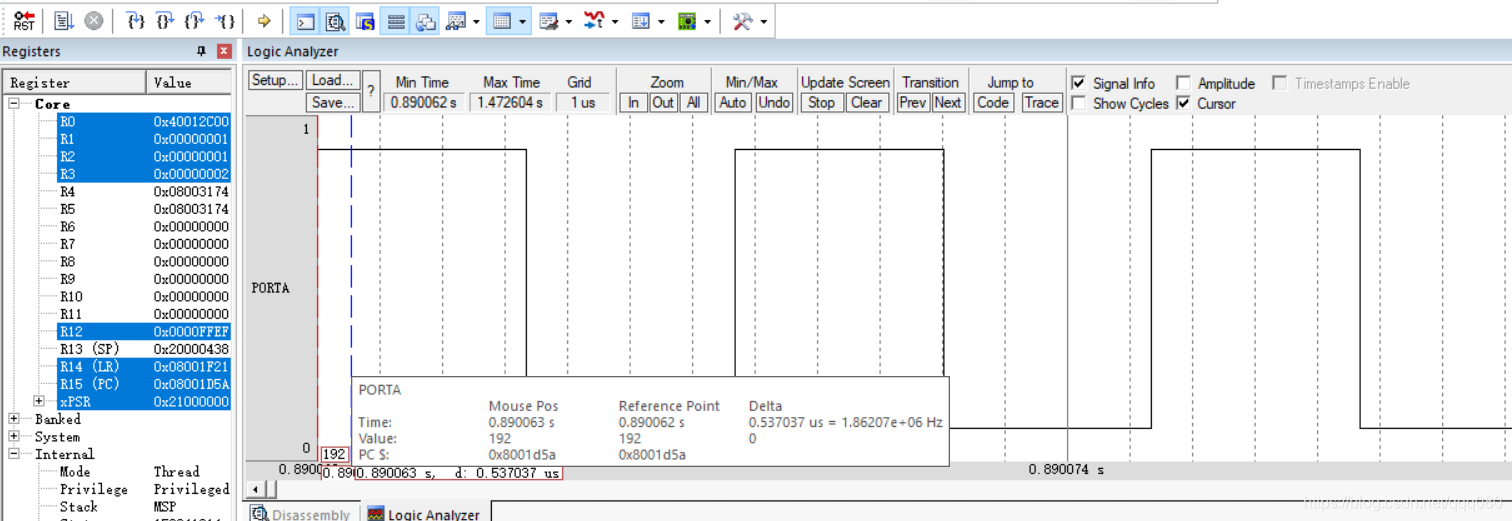
 选择逻辑分析器。
选择逻辑分析器。
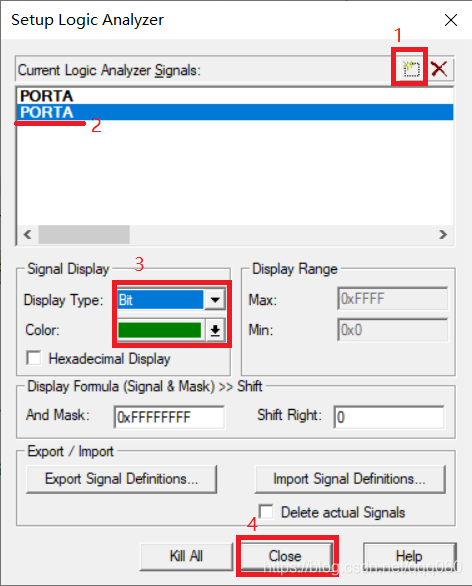
 添加观察口,根据自己代码添加(PARTA或者其它)。
添加观察口,根据自己代码添加(PARTA或者其它)。
 开始,在一段时间后停止。
开始,在一段时间后停止。
 结果如下:
结果如下:
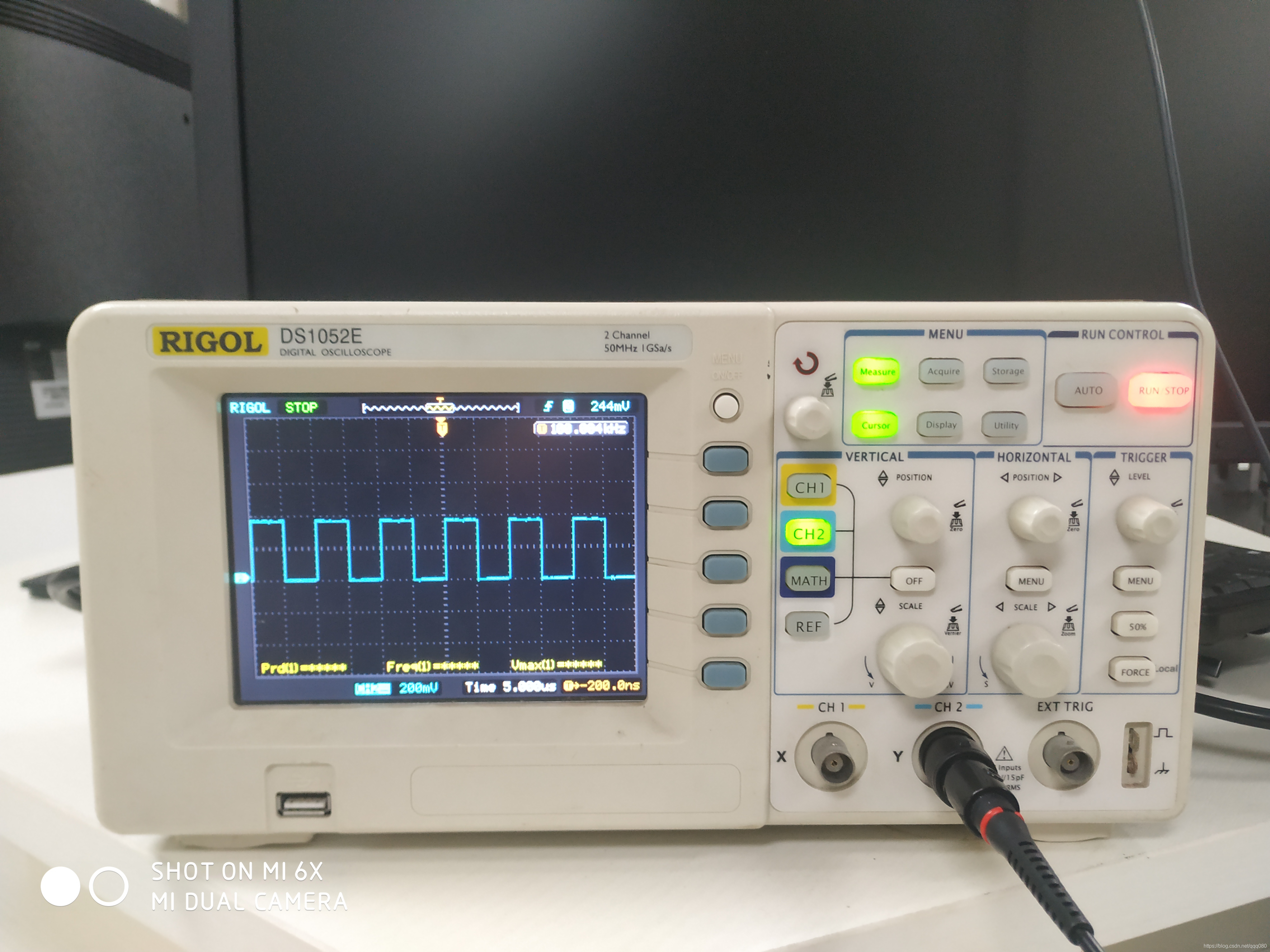
 3.示波器显示
示波器的夹子GND,笔接PA9或者PA10。
效果为:
3.示波器显示
示波器的夹子GND,笔接PA9或者PA10。
效果为:
一、PWM简介
PWM是 Pulse Width Modulation 的缩写,中文意思就是脉冲宽度调制,简称脉宽调制。其实我们也可以这样理解,PWM是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM 进行编码。
PWM模式根据计数器CNT计数方式,可分为边沿对齐模式和中心对齐模式。这些在野火资料里都有,不做介绍了。
二、实验步骤
1.示例
本文使用的是野火STM32F103-mini开发板资料1-程序源码_教程文档1《STM32库开发实战指南》(标准库源码)【优先学习】1-书籍配套例程-F103RCMINI32-TIM—高级定时器3-TIM—高级定时器-PWM输入捕获里面的代码。
主要代码为:
/* ---------------- PWM信号 周期和占空比的计算--------------- */
// ARR :自动重装载寄存器的值
// CLK_cnt:计数器的时钟,等于 Fck_int / (psc+1) = 72M/(psc+1)
// PWM 信号的周期 T = ARR * (1/CLK_cnt) = ARR*(PSC+1) / 72M
// 占空比P=CCR/(ARR+1)
/**
* @brief 通用定时器PWM输出初始化
* @param 无
* @retval 无
* @note
*/
static void ADVANCE_TIM_Mode_Config(void)
{
// 开启定时器时钟,即内部时钟CK_INT=72M
ADVANCE_TIM_APBxClock_FUN(ADVANCE_TIM_CLK,ENABLE);
/*--------------------时基结构体初始化-------------------------*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
// 自动重装载寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断
TIM_TimeBaseStructure.TIM_Period=ADVANCE_TIM_PERIOD;
// 驱动CNT计数器的时钟 = Fck_int/(psc+1)
TIM_TimeBaseStructure.TIM_Prescaler= ADVANCE_TIM_PSC;
// 时钟分频因子 ,配置死区时间时需要用到
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
// 计数器计数模式,设置为向上计数
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
// 重复计数器的值,没用到不用管
TIM_TimeBaseStructure.TIM_RepetitionCounter=0;
// 初始化定时器
TIM_TimeBaseInit(ADVANCE_TIM, &TIM_TimeBaseStructure);
/*--------------------输入捕获结构体初始化-------------------*/
// 使用PWM输入模式时,需要占用两个捕获寄存器,一个测周期,另外一个测占空比
TIM_ICInitTypeDef TIM_ICInitStructure;
// 捕获通道IC1配置
// 选择捕获通道
TIM_ICInitStructure.TIM_Channel = ADVANCE_TIM_IC1PWM_CHANNEL;
// 设置捕获的边沿
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
// 设置捕获通道的信号来自于哪个输入通道,有直连和非直连两种
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
// 1分频,即捕获信号的每个有效边沿都捕获
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
// 不滤波
TIM_ICInitStructure.TIM_ICFilter = 0x0;
// 初始化PWM输入模式
TIM_PWMIConfig(ADVANCE_TIM, &TIM_ICInitStructure);
// 当工作做PWM输入模式时,只需要设置触发信号的那一路即可(用于测量周期)
// 另外一路(用于测量占空比)会由硬件自带设置,不需要再配置
// 捕获通道IC2配置
// TIM_ICInitStructure.TIM_Channel = ADVANCE_TIM_IC1PWM_CHANNEL;
// TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Falling;
// TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_IndirectTI;
// TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
// TIM_ICInitStructure.TIM_ICFilter = 0x0;
// TIM_PWMIConfig(ADVANCE_TIM, &TIM_ICInitStructure);
// 选择输入捕获的触发信号
TIM_SelectInputTrigger(ADVANCE_TIM, TIM_TS_TI1FP1);
// 选择从模式: 复位模式
// PWM输入模式时,从模式必须工作在复位模式,当捕获开始时,计数器CNT会被复位
TIM_SelectSlaveMode(ADVANCE_TIM, TIM_SlaveMode_Reset);
TIM_SelectMasterSlaveMode(ADVANCE_TIM,TIM_MasterSlaveMode_Enable);
// 使能捕获中断,这个中断针对的是主捕获通道(测量周期那个)
TIM_ITConfig(ADVANCE_TIM, TIM_IT_CC1, ENABLE);
// 清除中断标志位
TIM_ClearITPendingBit(ADVANCE_TIM, TIM_IT_CC1);
// 使能高级控制定时器,计数器开始计数
TIM_Cmd(ADVANCE_TIM, ENABLE);
}
2.keil仿真
设置keil。
注意:Dialog DLL和Parameter里面的内容要和图片里的一致
打开调试。
选择逻辑分析器。
添加观察口,根据自己代码添加(PARTA或者其它)。
开始,在一段时间后停止。
结果如下:
3.示波器显示
示波器的夹子GND,笔接PA9或者PA10。
效果为:

 举报
举报




