



脉冲宽度调制(PWM),是英文“Pulse Width Modulation” 的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟威廉希尔官方网站 进行控制的一种非常有效的技术。当小车在运行过程中随着倾角的改变小车的速度也应该发生变化,如果只是单纯给予高低电平,只能以额定速度运动,显然不能达到我们想达到的程度,所以我们需要定时器输出PWM波,我们选用的主控模块只有4个定时器(1个高级3个通用)一个定时器有4个通道控制小车显然是足够的。当然如果你选择其他系列芯片会有多个定时器,选择也会更多











| PA2 | USART2_RX | 蓝牙 TX |
| PA3 | USART2_TX | 蓝牙 RX |
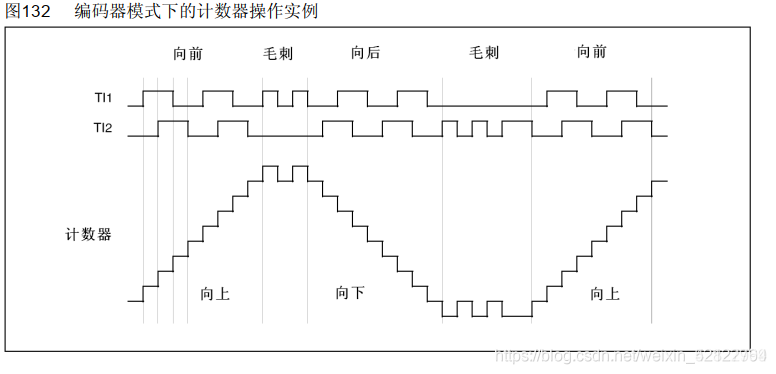
| PA0 | TIM2_CH1 | 电机A编码器A相 |
| PA1 | TIM2_CH2 | 电机A编码器B相 |
| PA6 | TIM3_CH1 | 电机B编码器B相 |
| PA7 | TIM3_CH2 | 电机B编码器A相 |
| PA8 | TIM1_CH1 | TB6612 PWMA |
| PA11 | TIM1_CH4 | TB6612 PWMB |
| PB1 | TIM3_CH3 | SR04 -> Trig |
| PB0 | TIM3_CH4 | SR04 -> Echo |
| PB5 | 无 | 6050外部中断 |
| PB6 | IIC1 SCL | 6050 SCL |
| PB7 | IIC1 SDA | 6050 SDA |
| PB10 | IIC2 SCL | OLED SCL |
| PB11 | IIC2 SDA | OLED SDA |
| PB12 | 无 | BIN2 |
| PB13 | 无 | BIN1 |
| PB14 | 无 | AIN1 |
| PB15 | 无 | AIN2 |







 举报
举报
更多回帖


