Prescaler:定时器预分频器设置,时钟源经该预分频器才是定时器时钟,它设定 TIMx_PSC
寄存器的值。可设置范围为 0 至 65535,实现 1 至 65536 分频。
• CounterMode:定时器计数方式,可是在为向上计数、向下计数以及三种中心对齐模式。基
本定时器只能是向上计数,即 TIMx_CNT 只能从 0 开始递增,并且无需初始化。
• Period:定时器周期,实际就是设定自动重载寄存器的值,在事件生成时更新到影子寄存
器。可设置范围为 0 至 65535。 • ClockDivision:时钟分频,设置定时器时钟 CK_INT 频率与数字滤波器采样时钟频率分频
比,基本定时器没有此功能,不用设置。
ClockDivision:时钟分频,设置定时器时钟 CK_INT 频率与数字滤波器采样时钟频率分频
比,基本定时器没有此功能,不用设置
• RepetitionCounter:重复计数器,属于高级控制寄存器专用寄存器位,利用它可以非常容
易控制输出 PWM 的个数。这里不用设置。
led 0.5翻转电平信号
TIMxCLK=HCLK/2=SystemCoreClock/2=84MHz
Prescaler = 8400-1
设定定时器频率为 =TIMxCLK/(TIM_Prescaler+1)=10000Hz
Period = 5000-1
即1/10000 = 0.0001s
0.0001s * 5000 = 0.5s 中断0.5s触发一次
计数器CNT数到5000与Period比较,相同产生中断
高级控制定时器 (TIM1 和 TIM8) 和通用定时器在基本定时器的基础上引入了外部引脚,可以
输入捕获和输出比较功能。高级控制定时器比通用定时器增加了可编程死区互补输出、重复计数
器、带刹车 (断路) 功能。
互补输出
定时器的PWM互补输出,
用在驱动器、逆变器方面。主要是用在全桥MOS管的控制上。
如下图,如果MOS管相同,PWM不反向的话,势必造成两个MOS都导通。相当于电源和地都直连
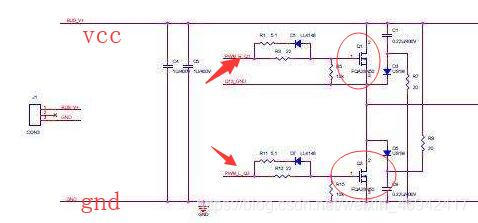
另外,这里还涉及到一个概念,死区时间。
由于两个MOS管的参数不一定完全相同,关断速度不一样,可能有那么几个us 或者MS 是上一个管马上要关闭,下一个已经打开了,造成了两个MOS都打开的短暂现象,所以一般需要加个死区时间。
TIM_OCInitStructure.OCPolarity = TIM_OCPOLARITY_HIGH; //正常通道级性
TIM_OCInitStructure.OCNPolarity = TIM_OCNPOLARITY_HIGH; //互补通道级性
TIM_OCInitStructure.OCIdleState = TIM_OCIDLESTATE_SET; //空闲状态下
TIM_OCInitStructure.OCNIdleState = TIM_OCNIDLESTATE_RESET; //互补空闲状态下

/* 定时器通道 1 输出 PWM /
HAL_TIM_PWM_Start(&TIM_TimeBaseStructure,TIM_CHANNEL_1);
/ 定时器通道 1 互补输出 PWM */
HAL_TIMEx_PWMN_Start(&TIM_TimeBaseStructure,TIM_CHANNEL_1);
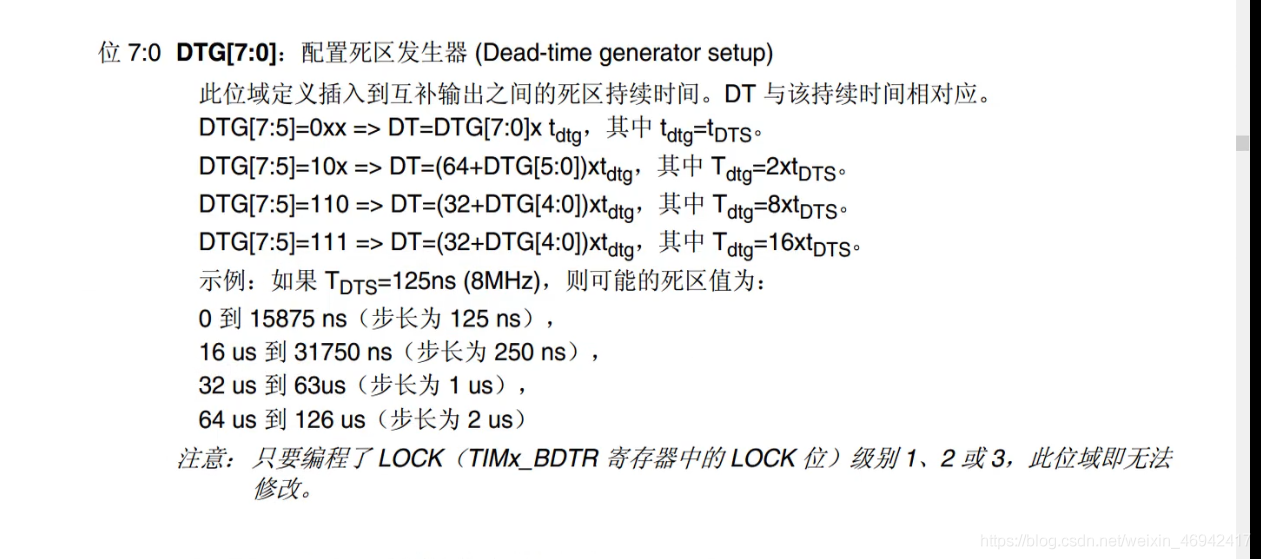
死区时间计算
TIM_BDTRInitStructure.DeadTime = 0xff;
TIM_BDTRInitStructure.BreakState = TIM_BREAK_ENABLE; //使能断路

0xff = 1111 1111
DTG[4:0] = 后5位 5个1 = 31
Tdtg = 16* tDTS
tDTS是通过分频器得到的

因为 TIM_TimeBaseStructure.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1; 我们不分频
所以是 00:tDTS = tCK_INT 也就168Mhz 也就是168Mhz/1
0xff;即DTG[7:5]=111 =》 DT = (32+DTG[4:0]) * Tdtg
即DT = (168000000/1 * 16) * (32 + 31) = 0.000006s
0.000006s * 1000 = 6ms
大概死区时间为6ms
输入捕获
pwm输入捕获模式
PWM 频率
Period = 10000-1;
Prescaler = 84-1;
TIMxCLK/(TIM_Prescaler+1)=84000000/84=1000000
pwm频率=1000000/Period = 100hz
100/1 = 10ms ,周期为 10ms
占空比为:(Pulse+1)/(Period+1) = 50%。
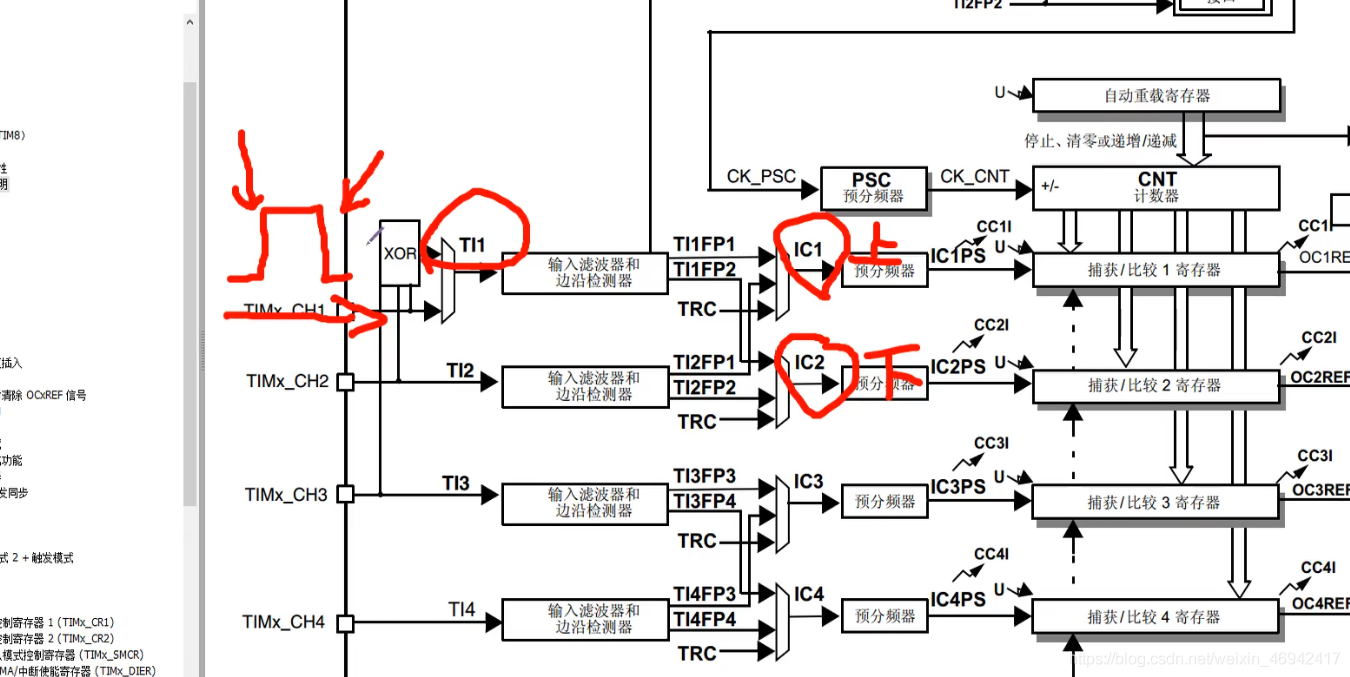
PWM 输入模式,需要使用两个捕获通道,占用两个捕获寄存器。由输入通道 TI1 输
入的信号会分成 TI1FP1 和 TI1FP2****,具体选择哪一路信号作为捕获触发信号决定着哪个捕获通
道测量的是周期。这里我们选择 TI1FP1 作为捕获的触发信号,那 PWM 信号的周期则存储在
CCR1 寄存器中,剩下的另外一路信号 TI1FP2 则进入 IC2,CCR2 寄存器存储的是脉冲宽度。
测量脉冲宽度我们选择捕获通道 2,即 IC2,设置捕获信号的极性,这里我们配置为下降沿,我们
需要对捕获信号的每个有效边沿(即我们设置的下降沿)都捕获
IC2 作为间接输入模式,我们需要配置他的从模式,即从模式复位模式,定时器触发源为
TIM_TS_TI1FP1,最后使用函数 HAL_TIM_SlaveConfigSynchronization 进行配置。


?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl80Njk0MjQxNw==,size_16,color_FFFFFF,t_70#pic_center
HAL_TIM_IC_Init(&TIM_PWMINPUT_Handle);
/* IC1 捕获:上升沿触发 TI1FP1 /
TIM_ICInitStructure.ICPolarity = TIM_ICPOLARITY_RISING;
TIM_ICInitStructure.ICSelection = TIM_ICSELECTION_DIRECTTI;
TIM_ICInitStructure.ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.ICFilter = 0x0;
HAL_TIM_IC_ConfigChannel(&TIM_PWMINPUT_Handle,
&TIM_ICInitStructure,ADVANCE_IC1PWM_CHANNEL);
/ IC2 捕获:下降沿触发 TI1FP2 */
TIM_ICInitStructure.ICPolarity = TIM_ICPOLARITY_FALLING;
TIM_ICInitStructure.ICSelection = TIM_ICSELECTION_INDIRECTTI;
TIM_ICInitStructure.ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.ICFilter = 0x0;
HAL_TIM_IC_ConfigChannel(&TIM_PWMINPUT_Handle,
&TIM_ICInitStructure,ADVANCE_IC2PWM_CHANNEL);
/* 选择从模式: 复位模式 /
TIM_SlaveConfigStructure.SlaveMode = TIM_SLAVEMODE_RESET;
/ 选择定时器输入触发: TI1FP1 /
TIM_SlaveConfigStructure.InputTrigger = TIM_TS_TI1FP1;
HAL_TIM_SlaveConfigSynchronization(&TIM_PWMINPUT_Handle,
&TIM_SlaveConfigStructure);
/ 使能捕获/比较 2 中断请求 */
HAL_TIM_IC_Start_IT(&TIM_PWMINPUT_Handle,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&TIM_PWMINPUT_Handle,TIM_CHANNEL_2);
获取输入捕获值 */
6 IC1Value = HAL_TIM_ReadCapturedValue(&TIM_PWMINPUT_Handle,ADVANCE_
,→IC1PWM_CHANNEL);
7 IC2Value = HAL_TIM_ReadCapturedValue(&TIM_PWMINPUT_Handle,ADVANCE_
,→IC2PWM_CHANNEL);
我们获取 CCR1 和 CCR2 寄存器中的值,当 CCR1 的值不为 0 时,
说明有效捕获到了一个周期,然后计算出频率和占空比。
如果是第一个上升沿中断,计数器会被复位,锁存到 CCR1 寄存器的值是 0,CCR2 寄存器的值
也是 0,无法计算频率和占空比。当第二次上升沿到来的时候,CCR1 和 CCR2 捕获到的才是有
效的值
/* 占空比计算 /
11 DutyCycle = (float)((IC2Value+1) * 100) / (IC1Value+1);
12
13 / 频率计算 */
14 Frequency = 168000000/168/(float)(IC1Value+1)
重要函数
HAL_TIM_IC_Init(&TIM_PWMINPUT_Handle);
HAL_TIM_IC_ConfigChannel(&TIM_PWMINPUT_Handle,
&TIM_ICInitStructure,ADVANCE_IC(1/2)PWM_CHANNEL);
HAL_TIM_SlaveConfigSynchronization(&TIM_PWMINPUT_Handle,
&TIM_SlaveConfigStructure);
HAL_TIM_IC_Start_IT(&TIM_PWMINPUT_Handle,TIM_CHANNEL_(1/2));
多通道输出比较

一开始我设置输出高电平,设置ARR为最大oxff。第一次时设置CCR为50000,当到了50000我进入中断使状态翻转并且使CCR的值加30000,因为寄存器是16位数据肯定溢出。最后CCR的数值是50000+30000-65536=14464。那么当计数器计数到了14464时,我又进入中断,使状态翻转并且将CCR的值加50000。。。那么它的频率就是1/计数80000的时间,占空比为50000/80000。
PWM 模式配置–这里配置为输出比较模式 /
TIM_OCInitStructure.OCMode = TIM_OCMODE_TOGGLE;
/ 比较输出的计数值 /
TIM_OCInitStructure.Pulse = OC_Pulse_num_Channel1;
/ 当定时器计数值小于 CCR1_Val 时为高电平 /
TIM_OCInitStructure.OCPolarity = TIM_OCPOLARITY_HIGH;
/ 设置互补通道输出的极性 /
TIM_OCInitStructure.OCNPolarity = TIM_OCNPOLARITY_LOW;
/ 快速模式设置 /
TIM_OCInitStructure.OCFastMode = TIM_OCFAST_DISABLE;
/ 空闲电平 /
TIM_OCInitStructure.OCIdleState = TIM_OCIDLESTATE_RESET;
/ 互补通道设置 */
TIM_OCInitStructure.OCNIdleState = TIM_OCNIDLESTATE_RESET;
HAL_TIM_OC_ConfigChannel(&TIM_AdvanceHandle, &TIM_OCInitStructure, ADVANCE_
,→TIM_CHANNEL_1);
/* 启动比较输出并使能中断 */
HAL_TIM_OC_Start_IT(&TIM_AdvanceHandle, ADVANCE_TIM_CHANNEL_1);
/* 使能比较通道 1 */
TIM_CCxChannelCmd(ADVANCE_TIM, ADVANCE_TIM_CHANNEL_1, TIM_CCx_ENABLE);
怎么理解呢
假设计数值为100,到125反转一次到150又反转了一次,即形成了pwm,那怎么做?在中断回调设置新的比较值即可。
Prescaler:定时器预分频器设置,时钟源经该预分频器才是定时器时钟,它设定 TIMx_PSC
寄存器的值。可设置范围为 0 至 65535,实现 1 至 65536 分频。
• CounterMode:定时器计数方式,可是在为向上计数、向下计数以及三种中心对齐模式。基
本定时器只能是向上计数,即 TIMx_CNT 只能从 0 开始递增,并且无需初始化。
• Period:定时器周期,实际就是设定自动重载寄存器的值,在事件生成时更新到影子寄存
器。可设置范围为 0 至 65535。 • ClockDivision:时钟分频,设置定时器时钟 CK_INT 频率与数字滤波器采样时钟频率分频
比,基本定时器没有此功能,不用设置。
ClockDivision:时钟分频,设置定时器时钟 CK_INT 频率与数字滤波器采样时钟频率分频
比,基本定时器没有此功能,不用设置
• RepetitionCounter:重复计数器,属于高级控制寄存器专用寄存器位,利用它可以非常容
易控制输出 PWM 的个数。这里不用设置。
led 0.5翻转电平信号
TIMxCLK=HCLK/2=SystemCoreClock/2=84MHz
Prescaler = 8400-1
设定定时器频率为 =TIMxCLK/(TIM_Prescaler+1)=10000Hz
Period = 5000-1
即1/10000 = 0.0001s
0.0001s * 5000 = 0.5s 中断0.5s触发一次
计数器CNT数到5000与Period比较,相同产生中断
高级控制定时器 (TIM1 和 TIM8) 和通用定时器在基本定时器的基础上引入了外部引脚,可以
输入捕获和输出比较功能。高级控制定时器比通用定时器增加了可编程死区互补输出、重复计数
器、带刹车 (断路) 功能。
互补输出
定时器的PWM互补输出,
用在驱动器、逆变器方面。主要是用在全桥MOS管的控制上。
如下图,如果MOS管相同,PWM不反向的话,势必造成两个MOS都导通。相当于电源和地都直连
另外,这里还涉及到一个概念,死区时间。
由于两个MOS管的参数不一定完全相同,关断速度不一样,可能有那么几个us 或者MS 是上一个管马上要关闭,下一个已经打开了,造成了两个MOS都打开的短暂现象,所以一般需要加个死区时间。
TIM_OCInitStructure.OCPolarity = TIM_OCPOLARITY_HIGH; //正常通道级性
TIM_OCInitStructure.OCNPolarity = TIM_OCNPOLARITY_HIGH; //互补通道级性
TIM_OCInitStructure.OCIdleState = TIM_OCIDLESTATE_SET; //空闲状态下
TIM_OCInitStructure.OCNIdleState = TIM_OCNIDLESTATE_RESET; //互补空闲状态下
/* 定时器通道 1 输出 PWM /
HAL_TIM_PWM_Start(&TIM_TimeBaseStructure,TIM_CHANNEL_1);
/ 定时器通道 1 互补输出 PWM */
HAL_TIMEx_PWMN_Start(&TIM_TimeBaseStructure,TIM_CHANNEL_1);
死区时间计算
TIM_BDTRInitStructure.DeadTime = 0xff;
TIM_BDTRInitStructure.BreakState = TIM_BREAK_ENABLE; //使能断路
0xff = 1111 1111
DTG[4:0] = 后5位 5个1 = 31
Tdtg = 16* tDTS
tDTS是通过分频器得到的
因为 TIM_TimeBaseStructure.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1; 我们不分频
所以是 00:tDTS = tCK_INT 也就168Mhz 也就是168Mhz/1
0xff;即DTG[7:5]=111 =》 DT = (32+DTG[4:0]) * Tdtg
即DT = (168000000/1 * 16) * (32 + 31) = 0.000006s
0.000006s * 1000 = 6ms
大概死区时间为6ms
输入捕获
pwm输入捕获模式
PWM 频率
Period = 10000-1;
Prescaler = 84-1;
TIMxCLK/(TIM_Prescaler+1)=84000000/84=1000000
pwm频率=1000000/Period = 100hz
100/1 = 10ms ,周期为 10ms
占空比为:(Pulse+1)/(Period+1) = 50%。
PWM 输入模式,需要使用两个捕获通道,占用两个捕获寄存器。由输入通道 TI1 输
入的信号会分成 TI1FP1 和 TI1FP2****,具体选择哪一路信号作为捕获触发信号决定着哪个捕获通
道测量的是周期。这里我们选择 TI1FP1 作为捕获的触发信号,那 PWM 信号的周期则存储在
CCR1 寄存器中,剩下的另外一路信号 TI1FP2 则进入 IC2,CCR2 寄存器存储的是脉冲宽度。
测量脉冲宽度我们选择捕获通道 2,即 IC2,设置捕获信号的极性,这里我们配置为下降沿,我们
需要对捕获信号的每个有效边沿(即我们设置的下降沿)都捕获
IC2 作为间接输入模式,我们需要配置他的从模式,即从模式复位模式,定时器触发源为
TIM_TS_TI1FP1,最后使用函数 HAL_TIM_SlaveConfigSynchronization 进行配置。
;
/* IC1 捕获:上升沿触发 TI1FP1 /
TIM_ICInitStructure.ICPolarity = TIM_ICPOLARITY_RISING;
TIM_ICInitStructure.ICSelection = TIM_ICSELECTION_DIRECTTI;
TIM_ICInitStructure.ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.ICFilter = 0x0;
HAL_TIM_IC_ConfigChannel(&TIM_PWMINPUT_Handle,
&TIM_ICInitStructure,ADVANCE_IC1PWM_CHANNEL);
/ IC2 捕获:下降沿触发 TI1FP2 */
TIM_ICInitStructure.ICPolarity = TIM_ICPOLARITY_FALLING;
TIM_ICInitStructure.ICSelection = TIM_ICSELECTION_INDIRECTTI;
TIM_ICInitStructure.ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.ICFilter = 0x0;
HAL_TIM_IC_ConfigChannel(&TIM_PWMINPUT_Handle,
&TIM_ICInitStructure,ADVANCE_IC2PWM_CHANNEL);
/* 选择从模式: 复位模式 /
TIM_SlaveConfigStructure.SlaveMode = TIM_SLAVEMODE_RESET;
/ 选择定时器输入触发: TI1FP1 /
TIM_SlaveConfigStructure.InputTrigger = TIM_TS_TI1FP1;
HAL_TIM_SlaveConfigSynchronization(&TIM_PWMINPUT_Handle,
&TIM_SlaveConfigStructure);
/ 使能捕获/比较 2 中断请求 */
HAL_TIM_IC_Start_IT(&TIM_PWMINPUT_Handle,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&TIM_PWMINPUT_Handle,TIM_CHANNEL_2);
获取输入捕获值 */
6 IC1Value = HAL_TIM_ReadCapturedValue(&TIM_PWMINPUT_Handle,ADVANCE_
,→IC1PWM_CHANNEL);
7 IC2Value = HAL_TIM_ReadCapturedValue(&TIM_PWMINPUT_Handle,ADVANCE_
,→IC2PWM_CHANNEL);
我们获取 CCR1 和 CCR2 寄存器中的值,当 CCR1 的值不为 0 时,
说明有效捕获到了一个周期,然后计算出频率和占空比。
如果是第一个上升沿中断,计数器会被复位,锁存到 CCR1 寄存器的值是 0,CCR2 寄存器的值
也是 0,无法计算频率和占空比。当第二次上升沿到来的时候,CCR1 和 CCR2 捕获到的才是有
效的值
/* 占空比计算 /
11 DutyCycle = (float)((IC2Value+1) * 100) / (IC1Value+1);
12
13 / 频率计算 */
14 Frequency = 168000000/168/(float)(IC1Value+1)
重要函数
HAL_TIM_IC_Init(&TIM_PWMINPUT_Handle);
HAL_TIM_IC_ConfigChannel(&TIM_PWMINPUT_Handle,
&TIM_ICInitStructure,ADVANCE_IC(1/2)PWM_CHANNEL);
HAL_TIM_SlaveConfigSynchronization(&TIM_PWMINPUT_Handle,
&TIM_SlaveConfigStructure);
HAL_TIM_IC_Start_IT(&TIM_PWMINPUT_Handle,TIM_CHANNEL_(1/2));
多通道输出比较
一开始我设置输出高电平,设置ARR为最大oxff。第一次时设置CCR为50000,当到了50000我进入中断使状态翻转并且使CCR的值加30000,因为寄存器是16位数据肯定溢出。最后CCR的数值是50000+30000-65536=14464。那么当计数器计数到了14464时,我又进入中断,使状态翻转并且将CCR的值加50000。。。那么它的频率就是1/计数80000的时间,占空比为50000/80000。
PWM 模式配置–这里配置为输出比较模式 /
TIM_OCInitStructure.OCMode = TIM_OCMODE_TOGGLE;
/ 比较输出的计数值 /
TIM_OCInitStructure.Pulse = OC_Pulse_num_Channel1;
/ 当定时器计数值小于 CCR1_Val 时为高电平 /
TIM_OCInitStructure.OCPolarity = TIM_OCPOLARITY_HIGH;
/ 设置互补通道输出的极性 /
TIM_OCInitStructure.OCNPolarity = TIM_OCNPOLARITY_LOW;
/ 快速模式设置 /
TIM_OCInitStructure.OCFastMode = TIM_OCFAST_DISABLE;
/ 空闲电平 /
TIM_OCInitStructure.OCIdleState = TIM_OCIDLESTATE_RESET;
/ 互补通道设置 */
TIM_OCInitStructure.OCNIdleState = TIM_OCNIDLESTATE_RESET;
HAL_TIM_OC_ConfigChannel(&TIM_AdvanceHandle, &TIM_OCInitStructure, ADVANCE_
,→TIM_CHANNEL_1);
/* 启动比较输出并使能中断 */
HAL_TIM_OC_Start_IT(&TIM_AdvanceHandle, ADVANCE_TIM_CHANNEL_1);
/* 使能比较通道 1 */
TIM_CCxChannelCmd(ADVANCE_TIM, ADVANCE_TIM_CHANNEL_1, TIM_CCx_ENABLE);
怎么理解呢
假设计数值为100,到125反转一次到150又反转了一次,即形成了pwm,那怎么做?在中断回调设置新的比较值即可。

 举报
举报










 举报
举报



