一、利用STM32CubeMX新建工程
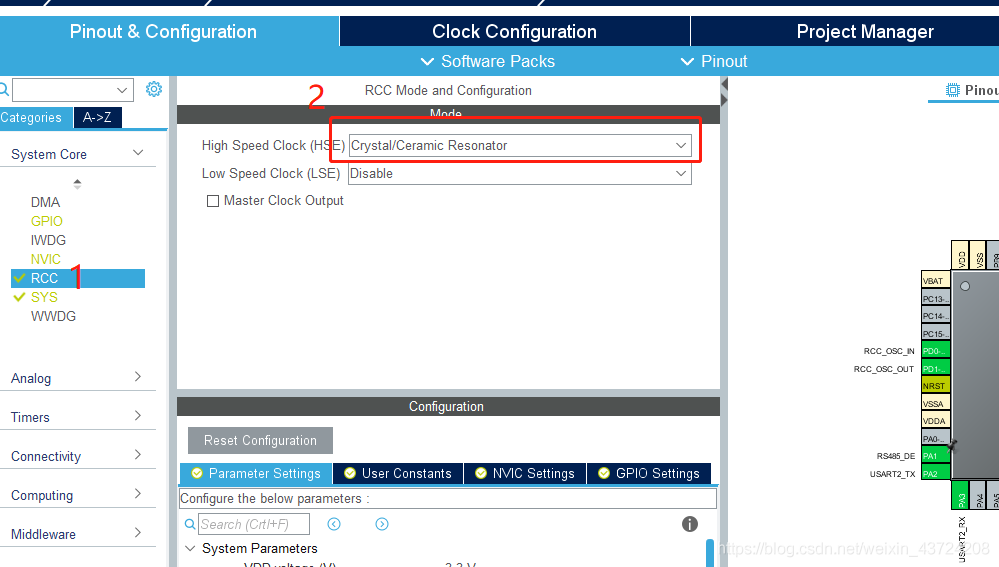
1、配置时钟
时钟源选择外部晶振。
 配置时钟树。
配置时钟树。
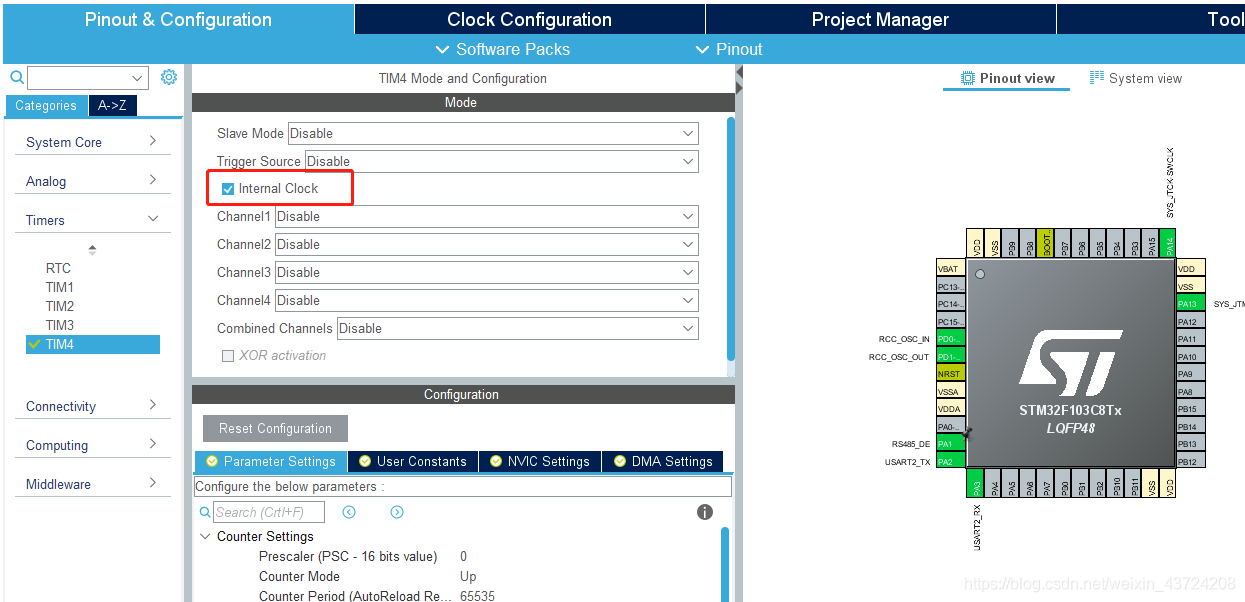
 2·、配置定时器
暂时先勾选internal clock就行,在modbus移植过程中还会对定时器重新初始化。
2·、配置定时器
暂时先勾选internal clock就行,在modbus移植过程中还会对定时器重新初始化。
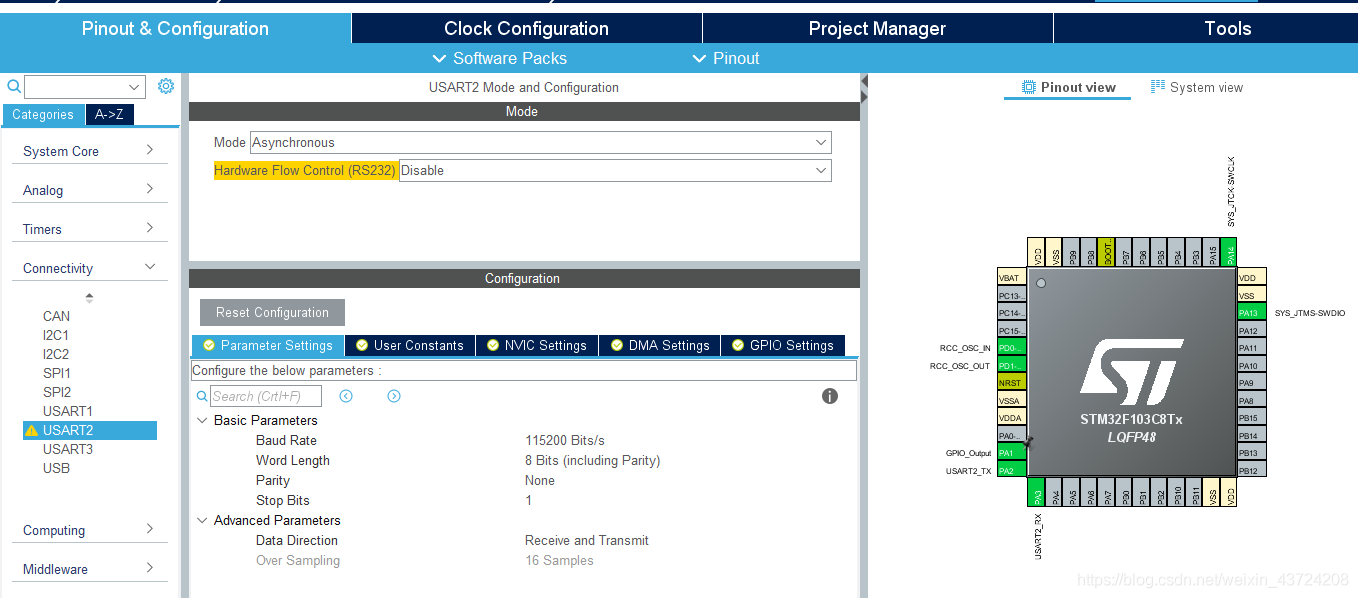
 3、配置串口
随便配置就行,在modbus移植过程中还会对串口重新初始化。
3、配置串口
随便配置就行,在modbus移植过程中还会对串口重新初始化。
 4、中断配置
这里注意,串口的优先级是要比定时器优先高的。
4、中断配置
这里注意,串口的优先级是要比定时器优先高的。
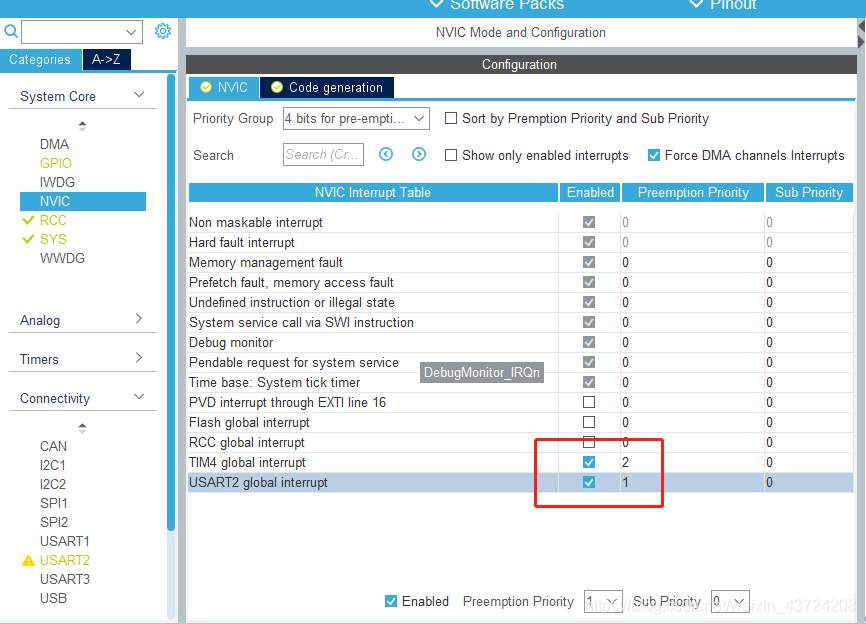 取消掉自动生成中断服务程序,在移植过程中我们要自己编写串口和定时器的中断服务程序。
取消掉自动生成中断服务程序,在移植过程中我们要自己编写串口和定时器的中断服务程序。
 5、配置GPIO
如果使用了485模式,还需要一个发送接收控制端,该IO配置为推挽输出模式。也可以为该引脚设置User Label。
5、配置GPIO
如果使用了485模式,还需要一个发送接收控制端,该IO配置为推挽输出模式。也可以为该引脚设置User Label。
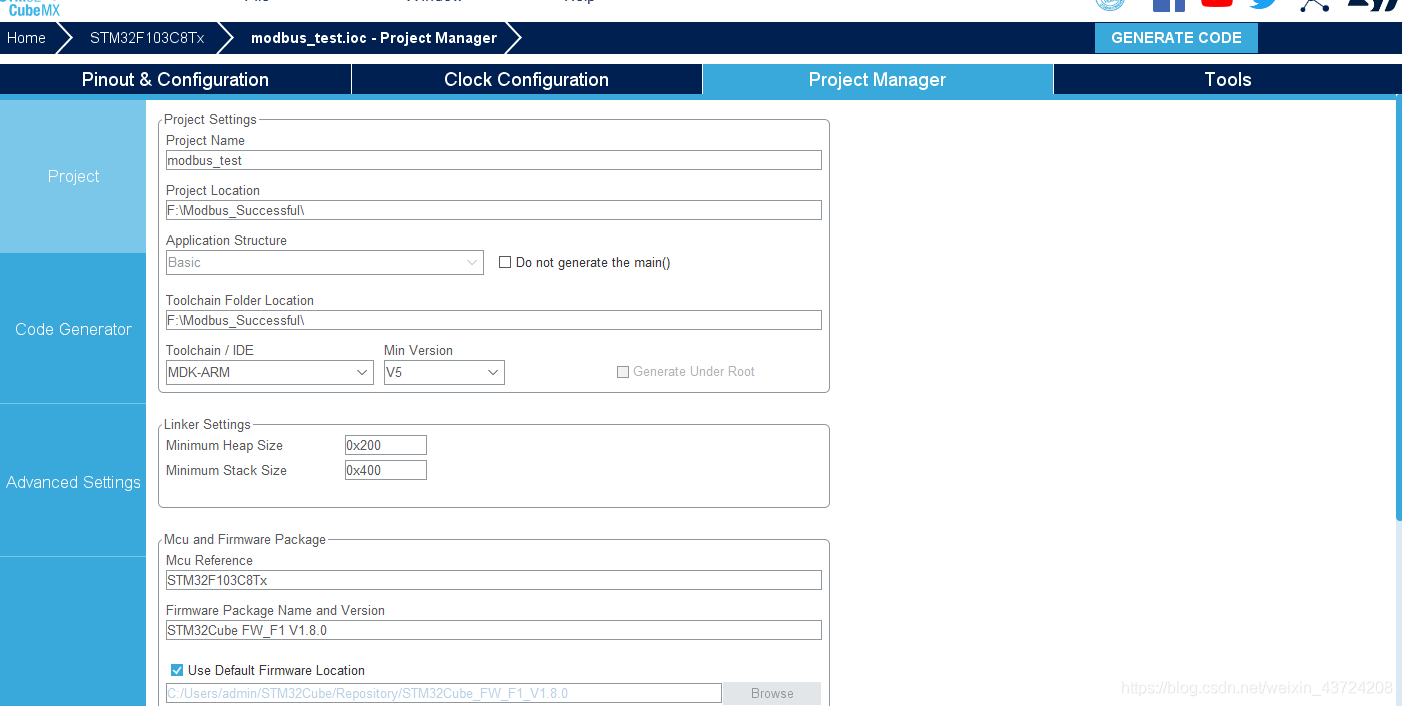
 6、创建工程
6、创建工程
 二、下载freemodbus源码并且添加到刚才创建的工程
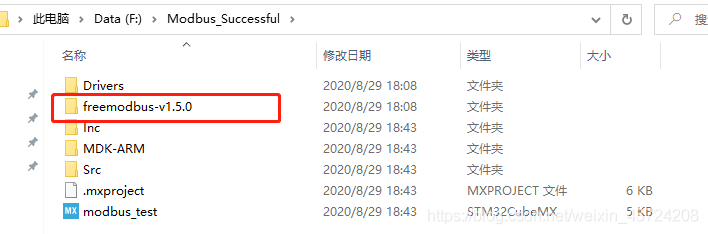
1、复制freemodbus源码到工程文件夹
二、下载freemodbus源码并且添加到刚才创建的工程
1、复制freemodbus源码到工程文件夹
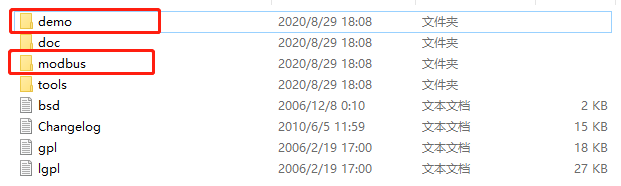
 2、在demo目录下的BARE文件夹里面新建port.c文件
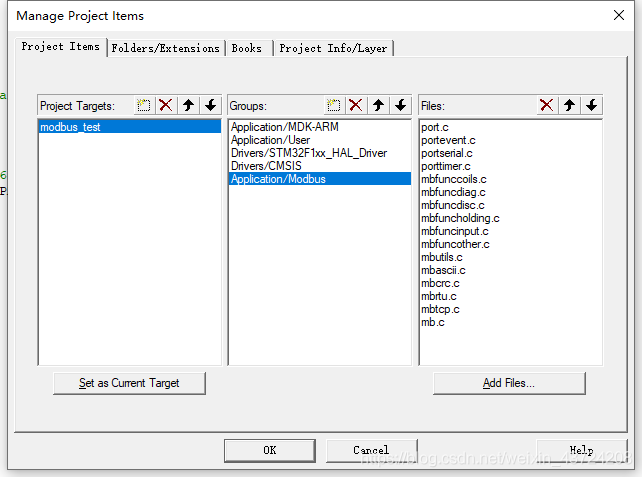
3、在keil中添加freemodbus源码
将modbus和demo->BARE目录下的所有C文件添加进来。
2、在demo目录下的BARE文件夹里面新建port.c文件
3、在keil中添加freemodbus源码
将modbus和demo->BARE目录下的所有C文件添加进来。
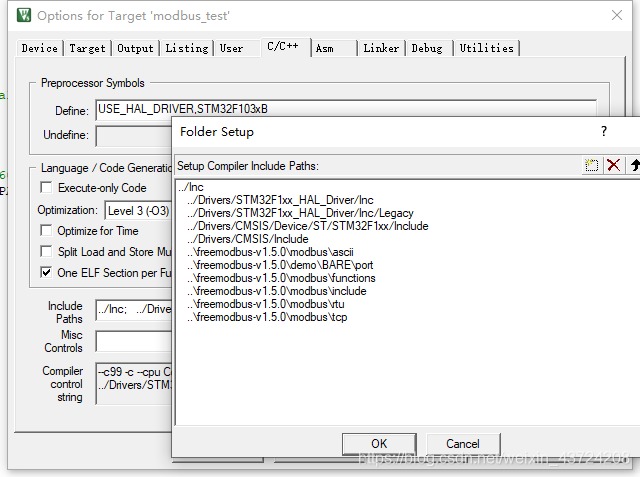
 4、编辑头文件包含路径
4、编辑头文件包含路径
三、编写代码
1、物理接口文件的修改
在物理层,用户只需完成串行口及超时定时器的配置即可。具体应修改接口文件portserial.c及porttimer.c。
1)portserial.c中函数的修改
void vMBPortSerialEnable( BOOL xRxEnable, BOOL xTxEnable )
{
if(xRxEnable)
{
__HAL_UART_ENABLE_IT(&huart2, UART_IT_RXNE); //使能接收寄存器非空中断
HAL_GPIO_WritePin(RS485_DE_GPIO_Port, RS485_DE_Pin, GPIO_PIN_RESET); //MAX485操作 低电平为接收模式
}
else
{
__HAL_UART_DISABLE_IT(&huart2, UART_IT_RXNE); //禁能接收寄存器非空中断
HAL_GPIO_WritePin(RS485_DE_GPIO_Port, RS485_DE_Pin, GPIO_PIN_SET); //MAX485操作 高电平为发送模式
}
if (TRUE == xTxEnable)
{
HAL_GPIO_WritePin(RS485_DE_GPIO_Port, RS485_DE_Pin, GPIO_PIN_SET); //MAX485操作 高电平为发送模式
__HAL_UART_ENABLE_IT(&huart2, UART_IT_TC); //使能发送完成中断
}
else
{
__HAL_UART_DISABLE_IT(&huart2, UART_IT_TC); //禁能发送完成中断
}
}
BOOL xMBPortSerialInit( UCHAR ucPORT, ULONG ulBaudRate, UCHAR ucDataBits, eMBParity eParity )
{
huart2.Instance = USART2;
huart2.Init.BaudRate = ulBaudRate;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
HAL_GPIO_WritePin(RS485_DE_GPIO_Port, RS485_DE_Pin, GPIO_PIN_RESET); //MAX485操作 低电平为接收模式
switch(eParity)
{
// 奇校验
case MB_PAR_ODD:
huart2.Init.Parity = UART_PARITY_ODD;
huart2.Init.WordLength = UART_WORDLENGTH_9B; // 带奇偶校验数据位为9bits
break;
// 偶校验
case MB_PAR_EVEN:
huart2.Init.Parity = UART_PARITY_EVEN;
huart2.Init.WordLength = UART_WORDLENGTH_9B; // 带奇偶校验数据位为9bits
break;
// 无校验
default:
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.WordLength = UART_WORDLENGTH_8B; // 无奇偶校验数据位为8bits
break;
}
return HAL_UART_Init(&huart2) == HAL_OK ? TRUE : FALSE;
}
BOOL xMBPortSerialPutByte( CHAR ucByte )
{
HAL_GPIO_WritePin(RS485_DE_GPIO_Port, RS485_DE_Pin, GPIO_PIN_SET); //MAX485操作 高电平为发送模式
USART2->DR = ucByte;
return TRUE;
}
BOOL xMBPortSerialGetByte( CHAR * pucByte )
{
HAL_GPIO_WritePin(RS485_DE_GPIO_Port, RS485_DE_Pin, GPIO_PIN_RESET); //MAX485操作 低电平为接收模式
*pucByte = (USART2->DR & (uint16_t)0x00FF);
return TRUE;
}
static void prvvUARTTxReadyISR( void )
{
pxMBFrameCBTransmitterEmpty( );
}
static void prvvUARTRxISR( void )
{
pxMBFrameCBByteReceived( );
}
void USART2_IRQHandler(void)
{
if(__HAL_UART_GET_FLAG(&huart2, UART_FLAG_RXNE)) // 接收非空中断标记被置位
{
__HAL_UART_CLEAR_FLAG(&huart2, UART_FLAG_RXNE); // 清除中断标记
prvvUARTRxISR();
}
if(__HAL_UART_GET_FLAG(&huart2, UART_FLAG_TC)) // 发送完成中断标记被置位
{
__HAL_UART_CLEAR_FLAG(&huart2, UART_FLAG_TC); // 清除中断标记
prvvUARTTxReadyISR();
}
}
2)porttimer.c中函数的修改
BOOL xMBPortTimersInit( USHORT usTim1Timerout50us )
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim4.Instance = TIM4;
htim4.Init.Prescaler = 3599; // 50us记一次数
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = usTim1Timerout50us - 1;//usTim1Timerout50us*50即为定时器溢出时间
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim4) != HAL_OK)
{
return FALSE;
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK)
{
return FALSE;
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
return FALSE;
}
__HAL_TIM_ENABLE_IT(&htim4, TIM_IT_UPDATE); // 使能定时器更新中断
return TRUE;
}
inline void vMBPortTimersEnable( )
{
__HAL_TIM_SET_COUNTER(&htim4, 0); // 清空计数器
__HAL_TIM_ENABLE(&htim4); // 使能定时器
}
inline void
vMBPortTimersDisable( )
{
__HAL_TIM_DISABLE(&htim4); // 禁能定时器
}
static void prvvTIMERExpiredISR( void )
{
( void )pxMBPortCBTimerExpired( );
}
// 定时器4中断服务程序
void TIM4_IRQHandler(void)
{
if(__HAL_TIM_GET_FLAG(&htim4, TIM_FLAG_UPDATE)) // 更新中断标记被置位
{
__HAL_TIM_CLEAR_FLAG(&htim4, TIM_FLAG_UPDATE);// 清除中断标记
prvvTIMERExpiredISR(); // 通知modbus3.5个字符等待时间到
}
}
2、应用层回函数的修改
在port中,定义所需要使用的寄存器,并修改对应的回函数。以下是操作保持寄存器的示例代码。
#include "port.h"
#include "mb.h"
//保持寄存器起始地址
#define REG_HOLDING_START 0x0001
//保持寄存器数量
#define REG_HOLDING_NREGS 10
//保持寄存器内容
uint16_t usRegHoldingBuf[REG_HOLDING_NREGS]
= {0x147b,0x3f8e,0x147b,0x400e,0x1eb8,0x4055,0x147b,0x408e,0x1111,0x1111};
/**
* @brief 保持寄存器处理函数,保持寄存器可读,可读可写
* @param pucRegBuffer 读操作时--返回数据指针,写操作时--输入数据指针
* usAddress 寄存器起始地址
* usNRegs 寄存器长度
* eMode 操作方式,读或者写
* @retval eStatus 寄存器状态
*/
eMBErrorCode
eMBRegHoldingCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs,
eMBRegisterMode eMode )
{
//错误状态
eMBErrorCode eStatus = MB_ENOERR;
//偏移量
int16_t iRegIndex;
//判断寄存器是不是在范围内
test = usAddress;
if ((usAddress >= (USHORT)REG_HOLDING_START)
&& (usAddress + usNRegs <= (USHORT)(REG_HOLDING_START + REG_HOLDING_NREGS)) )
{
//计算偏移量
iRegIndex = ( int16_t )( usAddress - REG_HOLDING_START);switch ( eMode ){
//读处理函数
case MB_REG_READ:
while( usNRegs > 0 )
{
*pucRegBuffer++ = ( uint8_t )( usRegHoldingBuf[iRegIndex] >> 8 );
*pucRegBuffer++ = ( uint8_t )( usRegHoldingBuf[iRegIndex] & 0xFF );
iRegIndex++;
usNRegs--;
}
break;
//写处理函数
case MB_REG_WRITE:
while( usNRegs > 0 )
{
usRegHoldingBuf[iRegIndex] = *pucRegBuffer++ << 8;
usRegHoldingBuf[iRegIndex] |= *pucRegBuffer++;
iRegIndex++;
usNRegs--;
}
break;
}
}
else
{
//返回错误状态
eStatus = MB_ENOREG;
}
return eStatus;
}
/// 未使用
eMBErrorCode eMBRegInputCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs )
{
return MB_ENOREG;
}
/// 未使用
eMBErrorCode eMBRegCoilsCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNCoils, eMBRegisterMode eMode )
{
return MB_ENOREG;
}
/// 未使用
eMBErrorCode eMBRegDiscreteCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNDiscrete )
{
return MB_ENOREG;
}
3、主函数的编写
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
//初始化 RTU模式 从机地址为1 USART1 9600 无校验
eMBInit(MB_RTU, 0x01, 0x02, 9600, MB_PAR_NONE);
//启动FreeModbus
eMBEnable();
while (1)
{
//FreeMODBUS不断查询
eMBPoll();
HAL_Delay(50);
}
}
四、特别注意
这里使能了串口的“发送完成中断”,而不是官方代码建议的“发送为空中断”。由于单片机复位后,发送完成标志位TC置0,或者由于上一次发送最后一个字节时,发送中断中清除了TC标志位,所以无法进入USART2_IRQHandler()函数中启动发送。因此,在eMBPoll()函数中插入如下代码,发送一帧数据中的第一个字节,触发发送完成中断,随后就会自动完成一帧数据的发送。
eMBErrorCode
eMBPoll( void )
{
static UCHAR *ucMBFrame;
static UCHAR ucRcvAddress;
static UCHAR ucFunctionCode;
static USHORT usLength;
static eMBException eException;
int i;
eMBErrorCode eStatus = MB_ENOERR;
eMBEventType eEvent;
/* Check if the protocol stack is ready. */
if( eMBState != STATE_ENABLED )
{
return MB_EILLSTATE;
}
/* Check if there is a event available. If not return control to caller.
* Otherwise we will handle the event. */
if( xMBPortEventGet( &eEvent ) == TRUE )
{
switch ( eEvent )
{
case EV_READY:
break;
case EV_FRAME_RECEIVED:
eStatus = peMBFrameReceiveCur( &ucRcvAddress, &ucMBFrame, &usLength );
if( eStatus == MB_ENOERR )
{
/* Check if the frame is for us. If not ignore the frame. */
if( ( ucRcvAddress == ucMBAddress ) || ( ucRcvAddress == MB_ADDRESS_BROADCAST ) )
{
( void )xMBPortEventPost( EV_EXECUTE );
}
}
break;
case EV_EXECUTE:
ucFunctionCode = ucMBFrame[MB_PDU_FUNC_OFF];
eException = MB_EX_ILLEGAL_FUNCTION;
for( i = 0; i < MB_FUNC_HANDLERS_MAX; i++ )
{
/* No more function handlers registered. Abort. */
if( xFuncHandlers
.ucFunctionCode == 0 )
{
break;
}
else if( xFuncHandlers.ucFunctionCode == ucFunctionCode )
{
eException = xFuncHandlers.pxHandler( ucMBFrame, &usLength );
break;
}
}
/* If the request was not sent to the broadcast address we
* return a reply. */
if( ucRcvAddress != MB_ADDRESS_BROADCAST )
{
if( eException != MB_EX_NONE )
{
/* An exception occured. Build an error frame. */
usLength = 0;
ucMBFrame[usLength++] = ( UCHAR )( ucFunctionCode | MB_FUNC_ERROR );
ucMBFrame[usLength++] = eException;
}
if( ( eMBCurrentMode == MB_ASCII ) && MB_ASCII_TIMEOUT_WAIT_BEFORE_SEND_MS )
{
vMBPortTimersDelay( MB_ASCII_TIMEOUT_WAIT_BEFORE_SEND_MS );
}
eStatus = peMBFrameSendCur( ucMBAddress, ucMBFrame, usLength );
//插入代码 begin
if( eStatus == MB_ENOERR ) //no error
{
xMBRTUTransmitFSM(); //发送一帧数据中的第一个字节,触发发送完成中断
}
//插入代码 end
}
break;
case EV_FRAME_SENT:
break;
}
}
return MB_ENOERR;
}
一、利用STM32CubeMX新建工程
1、配置时钟
时钟源选择外部晶振。
配置时钟树。
2·、配置定时器
暂时先勾选internal clock就行,在modbus移植过程中还会对定时器重新初始化。
3、配置串口
随便配置就行,在modbus移植过程中还会对串口重新初始化。
4、中断配置
这里注意,串口的优先级是要比定时器优先高的。
取消掉自动生成中断服务程序,在移植过程中我们要自己编写串口和定时器的中断服务程序。
5、配置GPIO
如果使用了485模式,还需要一个发送接收控制端,该IO配置为推挽输出模式。也可以为该引脚设置User Label。
6、创建工程
二、下载freemodbus源码并且添加到刚才创建的工程
1、复制freemodbus源码到工程文件夹
2、在demo目录下的BARE文件夹里面新建port.c文件
3、在keil中添加freemodbus源码
将modbus和demo->BARE目录下的所有C文件添加进来。
4、编辑头文件包含路径
三、编写代码
1、物理接口文件的修改
在物理层,用户只需完成串行口及超时定时器的配置即可。具体应修改接口文件portserial.c及porttimer.c。
1)portserial.c中函数的修改
void vMBPortSerialEnable( BOOL xRxEnable, BOOL xTxEnable )
{
if(xRxEnable)
{
__HAL_UART_ENABLE_IT(&huart2, UART_IT_RXNE); //使能接收寄存器非空中断
HAL_GPIO_WritePin(RS485_DE_GPIO_Port, RS485_DE_Pin, GPIO_PIN_RESET); //MAX485操作 低电平为接收模式
}
else
{
__HAL_UART_DISABLE_IT(&huart2, UART_IT_RXNE); //禁能接收寄存器非空中断
HAL_GPIO_WritePin(RS485_DE_GPIO_Port, RS485_DE_Pin, GPIO_PIN_SET); //MAX485操作 高电平为发送模式
}
if (TRUE == xTxEnable)
{
HAL_GPIO_WritePin(RS485_DE_GPIO_Port, RS485_DE_Pin, GPIO_PIN_SET); //MAX485操作 高电平为发送模式
__HAL_UART_ENABLE_IT(&huart2, UART_IT_TC); //使能发送完成中断
}
else
{
__HAL_UART_DISABLE_IT(&huart2, UART_IT_TC); //禁能发送完成中断
}
}
BOOL xMBPortSerialInit( UCHAR ucPORT, ULONG ulBaudRate, UCHAR ucDataBits, eMBParity eParity )
{
huart2.Instance = USART2;
huart2.Init.BaudRate = ulBaudRate;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
HAL_GPIO_WritePin(RS485_DE_GPIO_Port, RS485_DE_Pin, GPIO_PIN_RESET); //MAX485操作 低电平为接收模式
switch(eParity)
{
// 奇校验
case MB_PAR_ODD:
huart2.Init.Parity = UART_PARITY_ODD;
huart2.Init.WordLength = UART_WORDLENGTH_9B; // 带奇偶校验数据位为9bits
break;
// 偶校验
case MB_PAR_EVEN:
huart2.Init.Parity = UART_PARITY_EVEN;
huart2.Init.WordLength = UART_WORDLENGTH_9B; // 带奇偶校验数据位为9bits
break;
// 无校验
default:
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.WordLength = UART_WORDLENGTH_8B; // 无奇偶校验数据位为8bits
break;
}
return HAL_UART_Init(&huart2) == HAL_OK ? TRUE : FALSE;
}
BOOL xMBPortSerialPutByte( CHAR ucByte )
{
HAL_GPIO_WritePin(RS485_DE_GPIO_Port, RS485_DE_Pin, GPIO_PIN_SET); //MAX485操作 高电平为发送模式
USART2->DR = ucByte;
return TRUE;
}
BOOL xMBPortSerialGetByte( CHAR * pucByte )
{
HAL_GPIO_WritePin(RS485_DE_GPIO_Port, RS485_DE_Pin, GPIO_PIN_RESET); //MAX485操作 低电平为接收模式
*pucByte = (USART2->DR & (uint16_t)0x00FF);
return TRUE;
}
static void prvvUARTTxReadyISR( void )
{
pxMBFrameCBTransmitterEmpty( );
}
static void prvvUARTRxISR( void )
{
pxMBFrameCBByteReceived( );
}
void USART2_IRQHandler(void)
{
if(__HAL_UART_GET_FLAG(&huart2, UART_FLAG_RXNE)) // 接收非空中断标记被置位
{
__HAL_UART_CLEAR_FLAG(&huart2, UART_FLAG_RXNE); // 清除中断标记
prvvUARTRxISR();
}
if(__HAL_UART_GET_FLAG(&huart2, UART_FLAG_TC)) // 发送完成中断标记被置位
{
__HAL_UART_CLEAR_FLAG(&huart2, UART_FLAG_TC); // 清除中断标记
prvvUARTTxReadyISR();
}
}
2)porttimer.c中函数的修改
BOOL xMBPortTimersInit( USHORT usTim1Timerout50us )
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim4.Instance = TIM4;
htim4.Init.Prescaler = 3599; // 50us记一次数
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = usTim1Timerout50us - 1;//usTim1Timerout50us*50即为定时器溢出时间
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim4) != HAL_OK)
{
return FALSE;
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK)
{
return FALSE;
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
return FALSE;
}
__HAL_TIM_ENABLE_IT(&htim4, TIM_IT_UPDATE); // 使能定时器更新中断
return TRUE;
}
inline void vMBPortTimersEnable( )
{
__HAL_TIM_SET_COUNTER(&htim4, 0); // 清空计数器
__HAL_TIM_ENABLE(&htim4); // 使能定时器
}
inline void
vMBPortTimersDisable( )
{
__HAL_TIM_DISABLE(&htim4); // 禁能定时器
}
static void prvvTIMERExpiredISR( void )
{
( void )pxMBPortCBTimerExpired( );
}
// 定时器4中断服务程序
void TIM4_IRQHandler(void)
{
if(__HAL_TIM_GET_FLAG(&htim4, TIM_FLAG_UPDATE)) // 更新中断标记被置位
{
__HAL_TIM_CLEAR_FLAG(&htim4, TIM_FLAG_UPDATE);// 清除中断标记
prvvTIMERExpiredISR(); // 通知modbus3.5个字符等待时间到
}
}
2、应用层回函数的修改
在port中,定义所需要使用的寄存器,并修改对应的回函数。以下是操作保持寄存器的示例代码。
#include "port.h"
#include "mb.h"
//保持寄存器起始地址
#define REG_HOLDING_START 0x0001
//保持寄存器数量
#define REG_HOLDING_NREGS 10
//保持寄存器内容
uint16_t usRegHoldingBuf[REG_HOLDING_NREGS]
= {0x147b,0x3f8e,0x147b,0x400e,0x1eb8,0x4055,0x147b,0x408e,0x1111,0x1111};
/**
* @brief 保持寄存器处理函数,保持寄存器可读,可读可写
* @param pucRegBuffer 读操作时--返回数据指针,写操作时--输入数据指针
* usAddress 寄存器起始地址
* usNRegs 寄存器长度
* eMode 操作方式,读或者写
* @retval eStatus 寄存器状态
*/
eMBErrorCode
eMBRegHoldingCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs,
eMBRegisterMode eMode )
{
//错误状态
eMBErrorCode eStatus = MB_ENOERR;
//偏移量
int16_t iRegIndex;
//判断寄存器是不是在范围内
test = usAddress;
if ((usAddress >= (USHORT)REG_HOLDING_START)
&& (usAddress + usNRegs <= (USHORT)(REG_HOLDING_START + REG_HOLDING_NREGS)) )
{
//计算偏移量
iRegIndex = ( int16_t )( usAddress - REG_HOLDING_START);switch ( eMode ){
//读处理函数
case MB_REG_READ:
while( usNRegs > 0 )
{
*pucRegBuffer++ = ( uint8_t )( usRegHoldingBuf[iRegIndex] >> 8 );
*pucRegBuffer++ = ( uint8_t )( usRegHoldingBuf[iRegIndex] & 0xFF );
iRegIndex++;
usNRegs--;
}
break;
//写处理函数
case MB_REG_WRITE:
while( usNRegs > 0 )
{
usRegHoldingBuf[iRegIndex] = *pucRegBuffer++ << 8;
usRegHoldingBuf[iRegIndex] |= *pucRegBuffer++;
iRegIndex++;
usNRegs--;
}
break;
}
}
else
{
//返回错误状态
eStatus = MB_ENOREG;
}
return eStatus;
}
/// 未使用
eMBErrorCode eMBRegInputCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs )
{
return MB_ENOREG;
}
/// 未使用
eMBErrorCode eMBRegCoilsCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNCoils, eMBRegisterMode eMode )
{
return MB_ENOREG;
}
/// 未使用
eMBErrorCode eMBRegDiscreteCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNDiscrete )
{
return MB_ENOREG;
}
3、主函数的编写
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
//初始化 RTU模式 从机地址为1 USART1 9600 无校验
eMBInit(MB_RTU, 0x01, 0x02, 9600, MB_PAR_NONE);
//启动FreeModbus
eMBEnable();
while (1)
{
//FreeMODBUS不断查询
eMBPoll();
HAL_Delay(50);
}
}
四、特别注意
这里使能了串口的“发送完成中断”,而不是官方代码建议的“发送为空中断”。由于单片机复位后,发送完成标志位TC置0,或者由于上一次发送最后一个字节时,发送中断中清除了TC标志位,所以无法进入USART2_IRQHandler()函数中启动发送。因此,在eMBPoll()函数中插入如下代码,发送一帧数据中的第一个字节,触发发送完成中断,随后就会自动完成一帧数据的发送。
eMBErrorCode
eMBPoll( void )
{
static UCHAR *ucMBFrame;
static UCHAR ucRcvAddress;
static UCHAR ucFunctionCode;
static USHORT usLength;
static eMBException eException;
int i;
eMBErrorCode eStatus = MB_ENOERR;
eMBEventType eEvent;
/* Check if the protocol stack is ready. */
if( eMBState != STATE_ENABLED )
{
return MB_EILLSTATE;
}
/* Check if there is a event available. If not return control to caller.
* Otherwise we will handle the event. */
if( xMBPortEventGet( &eEvent ) == TRUE )
{
switch ( eEvent )
{
case EV_READY:
break;
case EV_FRAME_RECEIVED:
eStatus = peMBFrameReceiveCur( &ucRcvAddress, &ucMBFrame, &usLength );
if( eStatus == MB_ENOERR )
{
/* Check if the frame is for us. If not ignore the frame. */
if( ( ucRcvAddress == ucMBAddress ) || ( ucRcvAddress == MB_ADDRESS_BROADCAST ) )
{
( void )xMBPortEventPost( EV_EXECUTE );
}
}
break;
case EV_EXECUTE:
ucFunctionCode = ucMBFrame[MB_PDU_FUNC_OFF];
eException = MB_EX_ILLEGAL_FUNCTION;
for( i = 0; i < MB_FUNC_HANDLERS_MAX; i++ )
{
/* No more function handlers registered. Abort. */
if( xFuncHandlers
.ucFunctionCode == 0 )
{
break;
}
else if( xFuncHandlers.ucFunctionCode == ucFunctionCode )
{
eException = xFuncHandlers.pxHandler( ucMBFrame, &usLength );
break;
}
}
/* If the request was not sent to the broadcast address we
* return a reply. */
if( ucRcvAddress != MB_ADDRESS_BROADCAST )
{
if( eException != MB_EX_NONE )
{
/* An exception occured. Build an error frame. */
usLength = 0;
ucMBFrame[usLength++] = ( UCHAR )( ucFunctionCode | MB_FUNC_ERROR );
ucMBFrame[usLength++] = eException;
}
if( ( eMBCurrentMode == MB_ASCII ) && MB_ASCII_TIMEOUT_WAIT_BEFORE_SEND_MS )
{
vMBPortTimersDelay( MB_ASCII_TIMEOUT_WAIT_BEFORE_SEND_MS );
}
eStatus = peMBFrameSendCur( ucMBAddress, ucMBFrame, usLength );
//插入代码 begin
if( eStatus == MB_ENOERR ) //no error
{
xMBRTUTransmitFSM(); //发送一帧数据中的第一个字节,触发发送完成中断
}
//插入代码 end
}
break;
case EV_FRAME_SENT:
break;
}
}
return MB_ENOERR;
}

 举报
举报














 举报
举报



