1.3 MODBUS
主要实现功能码03读取和06写入功能。
1.3.1 MODBUS.c
#define ADDR 1
#define NULL 0
#define MODBUS_LENGTH 100
//波特率列表
u32 MODBUS_BaudRate[10]={4800,9600,14400,19200,38400,56000,57600,115200,128000,256000};
u16 Flash_Usart_BaudRate;
u16 Flash_Modbus_ADDR; //Modbus ID号
u8 canbuf[8]={0xff,0x00,0x30,0x31,0x32,0x01,0x02,0x03};
unsigned int UsartNUM;
unsigned short modbus_reg[MODBUS_LENGTH];
unsigned int Calculate_FLAG;
const unsigned char auchCRCHi[] = /* CRC��λ�ֽڱ�*/
{
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40
} ;
const unsigned char auchCRCLo[] = /* CRC��λ�ֽڱ�*/
{
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06, 0x07, 0xC7, 0x05, 0xC5, 0xC4, 0x04, 0xCC,
0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09, 0x08, 0xC8, 0xD8,
0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC, 0x14,
0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3, 0x11, 0xD1, 0xD0, 0x10, 0xF0,
0x30, 0x31, 0xF1, 0x33, 0xF3, 0xF2, 0x32, 0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4, 0x3C,
0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A, 0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28,
0xE8, 0xE9, 0x29, 0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF, 0x2D, 0xED, 0xEC, 0x2C, 0xE4,
0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26, 0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0,
0x60, 0x61, 0xA1, 0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67, 0xA5, 0x65, 0x64, 0xA4, 0x6C,
0xAC, 0xAD, 0x6D, 0xAF, 0x6F, 0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68, 0x78,
0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA, 0xBE, 0x7E, 0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4,
0x74, 0x75, 0xB5, 0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71, 0x70, 0xB0, 0x50,
0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92, 0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C,
0x5C, 0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B, 0x99, 0x59, 0x58, 0x98, 0x88,
0x48, 0x49, 0x89, 0x4B, 0x8B, 0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C, 0x44,
0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42, 0x43, 0x83, 0x41, 0x81, 0x80, 0x40
} ;
/******************************************************************************
CRC校验
*******************************************************************************/
unsigned int CRC_Calculate(unsigned char *pdata,unsigned char num)
{
unsigned char uchCRCHi = 0xFF ;
unsigned char uchCRCLo = 0xFF ;
unsigned char uIndex ;
while(num --)
{
uIndex = uchCRCHi^*pdata++ ;
uchCRCHi = uchCRCLo^auchCRCHi[uIndex];
uchCRCLo = auchCRCLo[uIndex];
}
return (uchCRCHi << 8 | uchCRCLo) ;
}
/******************************************************************************
数据应答发送函数
*******************************************************************************/
void MODBUS_Send(unsigned char *buf,unsigned int length)///发送length个数据
{
if(UsartNUM==1)
Usart1_SendString(buf,length);
if(UsartNUM==2)
{
Usart2_SendString(buf,length);
}
}
///******************************************************************************
// 03功能函数
//*******************************************************************************/
void MODBUS_03_Return(unsigned int startaddr,unsigned int number)
{
unsigned char send_length;
unsigned char send_buf[205];
unsigned char i;
unsigned int crc;
send_length = 0;
send_buf[send_length++] = Flash_Modbus_ADDR;
send_buf[send_length++] = 0x03; //03功能码
send_buf[send_length++] = number*2; //
for (i = 0;i < number;i++)
{
send_buf[send_length++] = modbus_reg[startaddr+i]/256;
send_buf[send_length++] = modbus_reg[startaddr+i]%256;
}
crc = CRC_Calculate(send_buf,send_length);
send_buf[send_length++] = crc/256;
send_buf[send_length++] = crc%256;
MODBUS_Send(send_buf,send_length);
}
///******************************************************************************
// 发送MODBUS协议字符串
//*******************************************************************************/
void MODBUS_10_Return(unsigned int addr,unsigned int code)
{
unsigned char send_buf[8];
unsigned int crc;
send_buf[0] = Flash_Modbus_ADDR;
send_buf[1] = 16;
send_buf[2] = (addr / 256);
send_buf[3] = (addr % 256);
send_buf[4] = (code / 256);
send_buf[5] = (code % 256);
crc = CRC_Calculate(send_buf,6);
send_buf[6] = (crc / 256);
send_buf[7] = (crc % 256);
MODBUS_Send(send_buf,8);
}
///******************************************************************************
// MODBUS数据接收处理函数
//*******************************************************************************/
void MODBUS(unsigned char *buf,unsigned int length,unsigned int NUM)
{
unsigned int startaddr,number,code;
unsigned int crc;
UsartNUM=NUM;
crc = CRC_Calculate(buf,length-2);
if (buf[0] == Flash_Modbus_ADDR&&buf[length-2] == (crc / 256)&&buf[length-1] == (crc % 256))
{
unsigned int Write_EN=0;
MODBUS_datain();
switch(buf[1])
{
case 0x03: //03 读取数据
startaddr = buf[2]*256 + buf[3];
number = buf[4]*256 + buf[5];
if ((startaddr+number) > MODBUS_LENGTH)
{
break;
}
MODBUS_03_Return(startaddr,number);
break;
case 0x06: //写一个数据
startaddr = buf[2]*256 + buf[3];
code = buf[4]*256 + buf[5];
if ((startaddr) > MODBUS_LENGTH)
{
break;
}
modbus_reg[startaddr] = code;
MODBUS_Send(buf,length);//原封不动的返回
Write_EN=1;
break;
case 0x10:
startaddr = buf[2]*256 + buf[3];
number = buf[4]*256 + buf[5];
if ((startaddr+number) > MODBUS_LENGTH)
{
break;
}
for (code = 0;code < number;code++)
{
modbus_reg[startaddr + code] = buf[6+code*2]*256 + buf[7+code*2];
}
MODBUS_10_Return(startaddr,number);
SYS_DEBUG_AP_FLAG=10;
break;
default:
break;
}
}
}
/******************************************************************************
串口接收事件
*******************************************************************************/
void MODBUS_event()
{
if ((usart1_rx_length) && (time3_usart1 >= (10-Flash_Usart_BaudRate)*5)) //串口1接收到一帧数据
{
MODBUS(usart1_rx_buf,usart1_rx_length,1);
usart1_rx_length = 0;
time3_usart1 = 0;
}
if ((usart2_rx_length) && (time3_usart2 >= (10-Flash_Usart_BaudRate)*5))
{
MODBUS(usart2_rx_buf,usart2_rx_length,2);
usart1_rx_length = 0;
time3_usart1 = 0;
}
}
///******************************************************************************
// MODBUS寄存器
//*******************************************************************************/
void MODBUS_datain()
{
modbus_reg[0]=Flash_Usart_BaudRate;///0x0007
modbus_reg[1]=Flash_Modbus_ADDR; ///Modbus ID号
modbus_reg[2]=0x1111;
modbus_reg[3]=0x2222;
modbus_reg[4]=0x3333;
///.....
///modbus_reg[n]=.....;
}
1.3.2 MODBUS.h
#ifndef __MODBUS_H
#define __MODBUS_H
#include "stm32f10x.h"
#include
extern u32 MODBUS_BaudRate[10];
extern u16 Flash_Modbus_ADDR;
extern u16 Flash_Usart_BaudRate;
void MODBUS_Send(unsigned char *buf,unsigned int length);
void MODBUS(unsigned char *buf,unsigned int length,unsigned int UsartNUM);
void MODBUS_ReadFromEEPROM(void);
void MODBUS_event(void);
void MODBUS_datain(void);
unsigned int CRC_Calculate(unsigned char *pdata,unsigned char num);
extern unsigned short modbus_reg[];
#endif
1.4 main函数
unsigned char send_buf[10];
char receive_buf[205];
unsigned char i;
int main(void)
{
USART1_Init();
USART2_Init();
TIM3_Int_Init(1,7199);//10Kh的计数频率,计数1次为500us 计算串口接收等待时间
Flash_Modbus_ADDR=0x0001;///本设备从站地址号
Flash_Usart_BaudRate=0x0007;
while(1)
{
MODBUS_event();//串口MODBUS接收事件
}
}
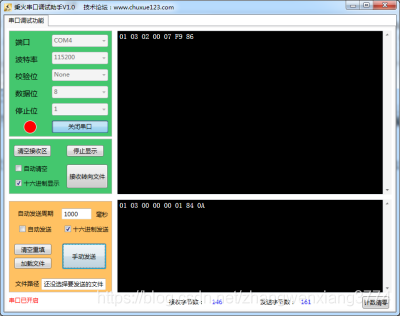
1.5 上位机仿真结果
2.F103做主站(程序),另外一个设备做从站
中断、定时器、串口等配置均与上面从站一致。不同的是:
1、主站需要发送指令代码
2、串口中断函数需要简单的修改,将接收到的数据发给上位机,可以查看是否正常。
如下是一个简单的main函数
unsigned char send_buf[10];
char receive_buf[205];
unsigned char i;
int main(void)
{
USART1_Init();
USART2_Init();
USART4_Init();
TIM3_Int_Init(1,7199);
Flash_Modbus_ADDR=0x0001;
Flash_Usart_BaudRate=0x0007;
// send_buf[0]=0x01;//从站地址
// send_buf[1]=0x03;//功能码
// send_buf[2]=0x00;//寄存器地址起始位高字节
// send_buf[3]=0x00;//寄存器地址起始位低字节
// send_buf[4]=0x00;//读取寄存器数量高字节
// send_buf[5]=0x64;//读取寄存器数量低字节
// send_buf[6]=0x44;///CRC高字节
// send_buf[7]=0x21;///CRC低字节
send_buf[0]=0x01;
send_buf[1]=0x03;
send_buf[2]=0x00;
send_buf[3]=0x00;
send_buf[4]=0x00;
send_buf[5]=0x03;
send_buf[6]=0x05;
send_buf[7]=0xCB;
for(i=0;i<8;i++)
{
Usart_SendByte( DEBUG_USART2,send_buf);
}
while(1)
{
// MODBUS_event();//暂时不需要对接收到的数据处理
}
}
1.3 MODBUS
主要实现功能码03读取和06写入功能。
1.3.1 MODBUS.c
#define ADDR 1
#define NULL 0
#define MODBUS_LENGTH 100
//波特率列表
u32 MODBUS_BaudRate[10]={4800,9600,14400,19200,38400,56000,57600,115200,128000,256000};
u16 Flash_Usart_BaudRate;
u16 Flash_Modbus_ADDR; //Modbus ID号
u8 canbuf[8]={0xff,0x00,0x30,0x31,0x32,0x01,0x02,0x03};
unsigned int UsartNUM;
unsigned short modbus_reg[MODBUS_LENGTH];
unsigned int Calculate_FLAG;
const unsigned char auchCRCHi[] = /* CRC��λ�ֽڱ�*/
{
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40
} ;
const unsigned char auchCRCLo[] = /* CRC��λ�ֽڱ�*/
{
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06, 0x07, 0xC7, 0x05, 0xC5, 0xC4, 0x04, 0xCC,
0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09, 0x08, 0xC8, 0xD8,
0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC, 0x14,
0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3, 0x11, 0xD1, 0xD0, 0x10, 0xF0,
0x30, 0x31, 0xF1, 0x33, 0xF3, 0xF2, 0x32, 0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4, 0x3C,
0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A, 0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28,
0xE8, 0xE9, 0x29, 0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF, 0x2D, 0xED, 0xEC, 0x2C, 0xE4,
0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26, 0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0,
0x60, 0x61, 0xA1, 0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67, 0xA5, 0x65, 0x64, 0xA4, 0x6C,
0xAC, 0xAD, 0x6D, 0xAF, 0x6F, 0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68, 0x78,
0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA, 0xBE, 0x7E, 0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4,
0x74, 0x75, 0xB5, 0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71, 0x70, 0xB0, 0x50,
0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92, 0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C,
0x5C, 0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B, 0x99, 0x59, 0x58, 0x98, 0x88,
0x48, 0x49, 0x89, 0x4B, 0x8B, 0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C, 0x44,
0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42, 0x43, 0x83, 0x41, 0x81, 0x80, 0x40
} ;
/******************************************************************************
CRC校验
*******************************************************************************/
unsigned int CRC_Calculate(unsigned char *pdata,unsigned char num)
{
unsigned char uchCRCHi = 0xFF ;
unsigned char uchCRCLo = 0xFF ;
unsigned char uIndex ;
while(num --)
{
uIndex = uchCRCHi^*pdata++ ;
uchCRCHi = uchCRCLo^auchCRCHi[uIndex];
uchCRCLo = auchCRCLo[uIndex];
}
return (uchCRCHi << 8 | uchCRCLo) ;
}
/******************************************************************************
数据应答发送函数
*******************************************************************************/
void MODBUS_Send(unsigned char *buf,unsigned int length)///发送length个数据
{
if(UsartNUM==1)
Usart1_SendString(buf,length);
if(UsartNUM==2)
{
Usart2_SendString(buf,length);
}
}
///******************************************************************************
// 03功能函数
//*******************************************************************************/
void MODBUS_03_Return(unsigned int startaddr,unsigned int number)
{
unsigned char send_length;
unsigned char send_buf[205];
unsigned char i;
unsigned int crc;
send_length = 0;
send_buf[send_length++] = Flash_Modbus_ADDR;
send_buf[send_length++] = 0x03; //03功能码
send_buf[send_length++] = number*2; //
for (i = 0;i < number;i++)
{
send_buf[send_length++] = modbus_reg[startaddr+i]/256;
send_buf[send_length++] = modbus_reg[startaddr+i]%256;
}
crc = CRC_Calculate(send_buf,send_length);
send_buf[send_length++] = crc/256;
send_buf[send_length++] = crc%256;
MODBUS_Send(send_buf,send_length);
}
///******************************************************************************
// 发送MODBUS协议字符串
//*******************************************************************************/
void MODBUS_10_Return(unsigned int addr,unsigned int code)
{
unsigned char send_buf[8];
unsigned int crc;
send_buf[0] = Flash_Modbus_ADDR;
send_buf[1] = 16;
send_buf[2] = (addr / 256);
send_buf[3] = (addr % 256);
send_buf[4] = (code / 256);
send_buf[5] = (code % 256);
crc = CRC_Calculate(send_buf,6);
send_buf[6] = (crc / 256);
send_buf[7] = (crc % 256);
MODBUS_Send(send_buf,8);
}
///******************************************************************************
// MODBUS数据接收处理函数
//*******************************************************************************/
void MODBUS(unsigned char *buf,unsigned int length,unsigned int NUM)
{
unsigned int startaddr,number,code;
unsigned int crc;
UsartNUM=NUM;
crc = CRC_Calculate(buf,length-2);
if (buf[0] == Flash_Modbus_ADDR&&buf[length-2] == (crc / 256)&&buf[length-1] == (crc % 256))
{
unsigned int Write_EN=0;
MODBUS_datain();
switch(buf[1])
{
case 0x03: //03 读取数据
startaddr = buf[2]*256 + buf[3];
number = buf[4]*256 + buf[5];
if ((startaddr+number) > MODBUS_LENGTH)
{
break;
}
MODBUS_03_Return(startaddr,number);
break;
case 0x06: //写一个数据
startaddr = buf[2]*256 + buf[3];
code = buf[4]*256 + buf[5];
if ((startaddr) > MODBUS_LENGTH)
{
break;
}
modbus_reg[startaddr] = code;
MODBUS_Send(buf,length);//原封不动的返回
Write_EN=1;
break;
case 0x10:
startaddr = buf[2]*256 + buf[3];
number = buf[4]*256 + buf[5];
if ((startaddr+number) > MODBUS_LENGTH)
{
break;
}
for (code = 0;code < number;code++)
{
modbus_reg[startaddr + code] = buf[6+code*2]*256 + buf[7+code*2];
}
MODBUS_10_Return(startaddr,number);
SYS_DEBUG_AP_FLAG=10;
break;
default:
break;
}
}
}
/******************************************************************************
串口接收事件
*******************************************************************************/
void MODBUS_event()
{
if ((usart1_rx_length) && (time3_usart1 >= (10-Flash_Usart_BaudRate)*5)) //串口1接收到一帧数据
{
MODBUS(usart1_rx_buf,usart1_rx_length,1);
usart1_rx_length = 0;
time3_usart1 = 0;
}
if ((usart2_rx_length) && (time3_usart2 >= (10-Flash_Usart_BaudRate)*5))
{
MODBUS(usart2_rx_buf,usart2_rx_length,2);
usart1_rx_length = 0;
time3_usart1 = 0;
}
}
///******************************************************************************
// MODBUS寄存器
//*******************************************************************************/
void MODBUS_datain()
{
modbus_reg[0]=Flash_Usart_BaudRate;///0x0007
modbus_reg[1]=Flash_Modbus_ADDR; ///Modbus ID号
modbus_reg[2]=0x1111;
modbus_reg[3]=0x2222;
modbus_reg[4]=0x3333;
///.....
///modbus_reg[n]=.....;
}
1.3.2 MODBUS.h
#ifndef __MODBUS_H
#define __MODBUS_H
#include "stm32f10x.h"
#include
extern u32 MODBUS_BaudRate[10];
extern u16 Flash_Modbus_ADDR;
extern u16 Flash_Usart_BaudRate;
void MODBUS_Send(unsigned char *buf,unsigned int length);
void MODBUS(unsigned char *buf,unsigned int length,unsigned int UsartNUM);
void MODBUS_ReadFromEEPROM(void);
void MODBUS_event(void);
void MODBUS_datain(void);
unsigned int CRC_Calculate(unsigned char *pdata,unsigned char num);
extern unsigned short modbus_reg[];
#endif
1.4 main函数
unsigned char send_buf[10];
char receive_buf[205];
unsigned char i;
int main(void)
{
USART1_Init();
USART2_Init();
TIM3_Int_Init(1,7199);//10Kh的计数频率,计数1次为500us 计算串口接收等待时间
Flash_Modbus_ADDR=0x0001;///本设备从站地址号
Flash_Usart_BaudRate=0x0007;
while(1)
{
MODBUS_event();//串口MODBUS接收事件
}
}
1.5 上位机仿真结果
2.F103做主站(程序),另外一个设备做从站
中断、定时器、串口等配置均与上面从站一致。不同的是:
1、主站需要发送指令代码
2、串口中断函数需要简单的修改,将接收到的数据发给上位机,可以查看是否正常。
如下是一个简单的main函数
unsigned char send_buf[10];
char receive_buf[205];
unsigned char i;
int main(void)
{
USART1_Init();
USART2_Init();
USART4_Init();
TIM3_Int_Init(1,7199);
Flash_Modbus_ADDR=0x0001;
Flash_Usart_BaudRate=0x0007;
// send_buf[0]=0x01;//从站地址
// send_buf[1]=0x03;//功能码
// send_buf[2]=0x00;//寄存器地址起始位高字节
// send_buf[3]=0x00;//寄存器地址起始位低字节
// send_buf[4]=0x00;//读取寄存器数量高字节
// send_buf[5]=0x64;//读取寄存器数量低字节
// send_buf[6]=0x44;///CRC高字节
// send_buf[7]=0x21;///CRC低字节
send_buf[0]=0x01;
send_buf[1]=0x03;
send_buf[2]=0x00;
send_buf[3]=0x00;
send_buf[4]=0x00;
send_buf[5]=0x03;
send_buf[6]=0x05;
send_buf[7]=0xCB;
for(i=0;i<8;i++)
{
Usart_SendByte( DEBUG_USART2,send_buf);
}
while(1)
{
// MODBUS_event();//暂时不需要对接收到的数据处理
}
}

 举报
举报

 举报
举报





