单片机学习小组
登录
直播中
陶醉了的猫
12年用户
599经验值
私信
关注
如何去实现一种WiFi智能小车的制作呢
开启该帖子的消息推送
单片机
WIFI
智能小车
如何使用arduino IDE对wifiduino板子进行编程呢?
如何去实现一种WiFi智能小车的制作呢?
回帖
(1)
张硕
2022-1-24 09:34:09
WiFi小车制作:
我做的WiFi小车是利用blinker软件进行操控的。小车是一个电机,一个舵机,因为这样控制方便程序比较简洁,线路接线少。我用到的控制板是wifiduino,和PM-R3拓展版(拓展版可以是其他的)。
WiFiduino大概就是这个样子:
这时要注意背面对应的引脚1
编程时定义的引脚是用背面的数值定义的。
现在先讲讲如何使用arduino IDE对wifiduino板子进行编程。
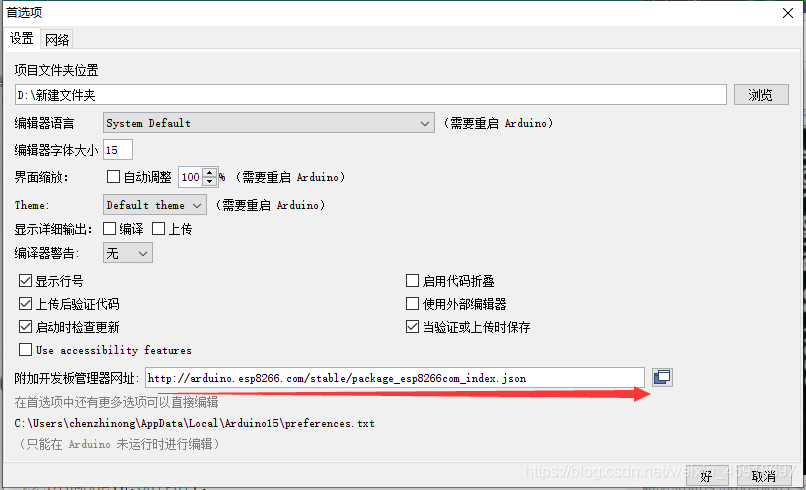
第一步:打开arduino IDE 找到文件→首选项。找到附加开发板管理器网址然后将网址输入
并保存。
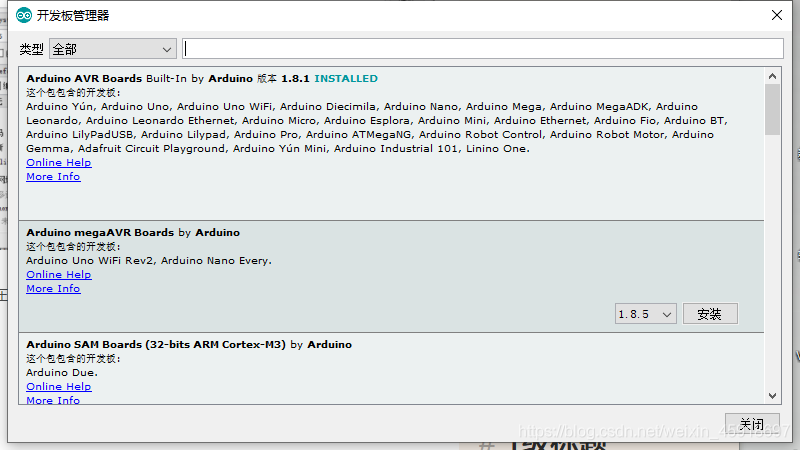
第二步:在arduino IDE上找到工具→开发板→开发板管理器。点击开发板管理器:
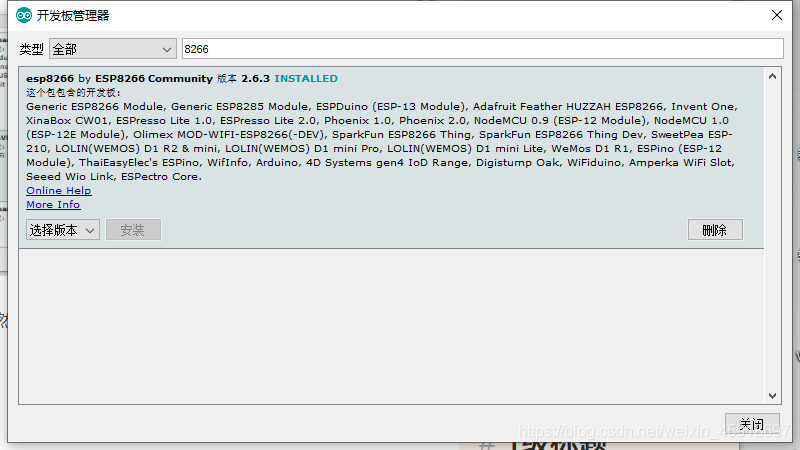
搜索8266然后出现这个:
然后安装一个版本2.4.1或者最新版本(我安装的是最新版本)
安装好后选中工具→开发板,找到wifiduino并选中还有在工具里面找到编程器并选择第一个AVR ISP。在网上下载一个blinker库以espressif。具体网址我找不到了。
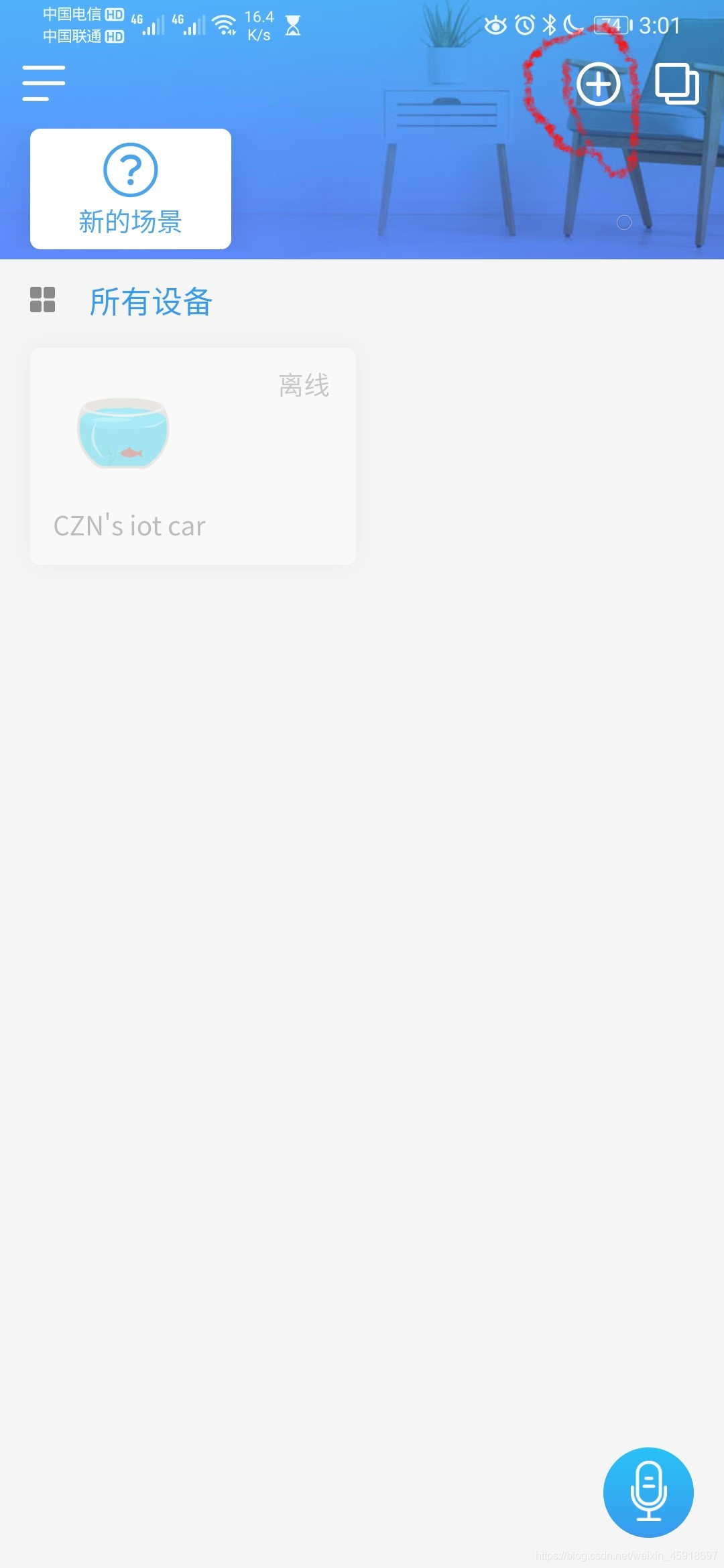
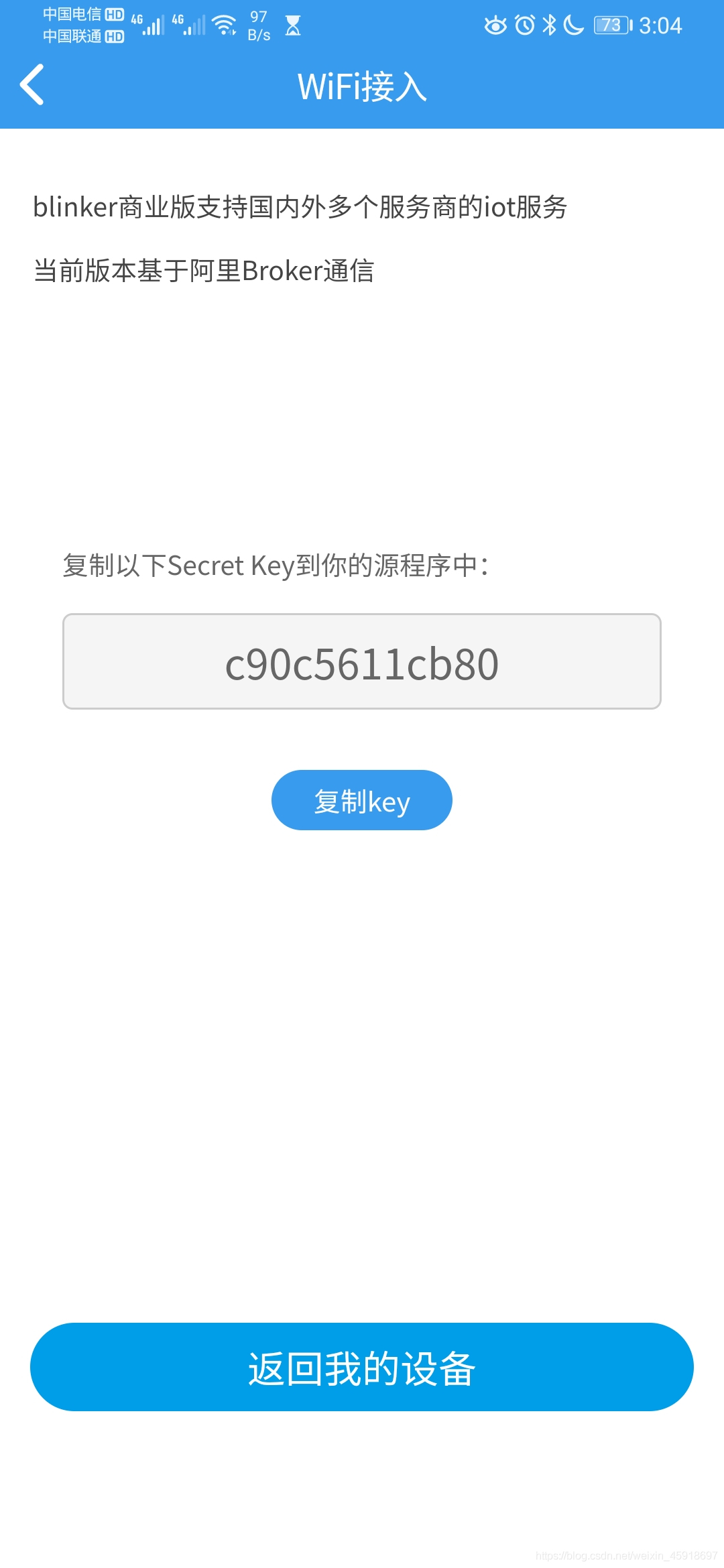
第三步:在手机上下载一个blinker软件。注册一个账号,进入软件点击在右上角的加号,添加一个Ardino设备,选择WiFi接入则会出现一个Secret Key,将该密匙几下,并放回我的设备。准备好后就可以开始编程了。
程序如下:
#define BLINKER_WIFI
#include
char auth[] = "f1db17ca3691"; //填入你在blinker上获得的密匙
char ssid[] = "HUAWEI P30"; //填入一个接入互联网的WiFi名称
char pswd[] = "123456789aa"; //填入该WiFi的密码
//int servopin=13;//定义舵机接口数字接口9
int myangle;//定义角度变量
int pulsewidth;//定义脉宽变量
int val;
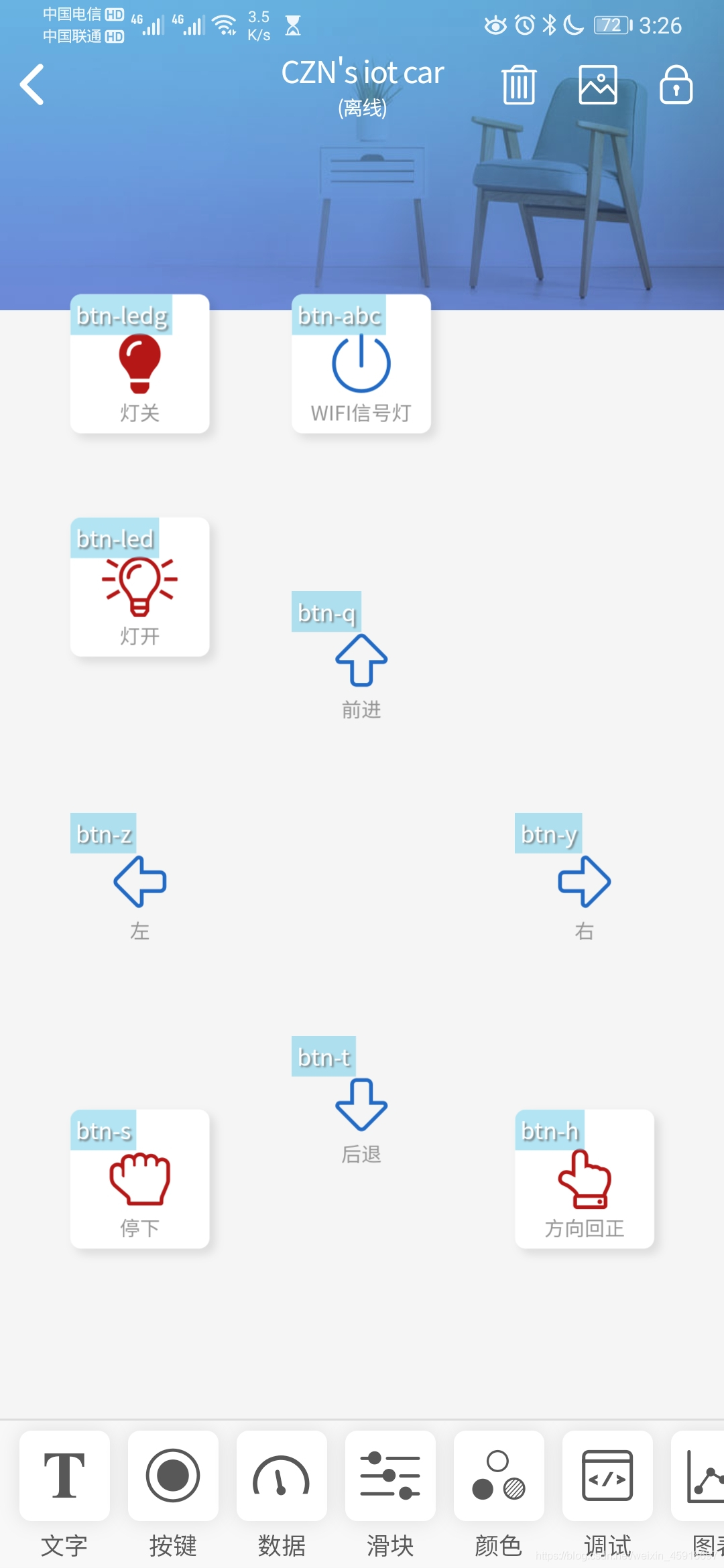
// 新建组件对象 引号里面对应的是blinker上的数据键名
BlinkerButton Button1("btn-abc");
BlinkerButton Button2("btn-q");
BlinkerButton Button3("btn-t");
BlinkerButton Button4("btn-s");
BlinkerButton Button5("btn-z");
BlinkerButton Button6("btn-y");
BlinkerButton Button7("btn-h");
BlinkerButton ButtonLED("btn-led");
BlinkerButton Buttonled("btn-ledg");
// 按下按键即会执行该函数
//该函数是控制wifiduino板上的蓝色LED灯
void button1_callback(const String & state)
{
BLINKER_LOG("get button state: ", state);
digitalWrite(LED_BUILTIN, !digitalRead(LED_BUILTIN));
}
// 按下键则小车就会向前动
void button2_callback(const String & state)
{
BLINKER_LOG("get button state: ",state);
digitalWrite(16,HIGH);
digitalWrite(14,LOW);
}
//小车后退
void button3_callback(const String & state)
{
BLINKER_LOG("get button state: ", state);
// if(state=="on"){
digitalWrite(16,HIGH);
digitalWrite(14,HIGH);
}
//小车停下
void button4_callback(const String & state){
BLINKER_LOG("get button state: ",state);
digitalWrite(16,LOW);
digitalWrite(14,LOW);
}
// 如果未绑定的组件被触发,则会执行其中内容
//小车左转向
void button5_callback(const String & state){
BLINKER_LOG("get button state: ",state);
val =60;
for(int i =0;i<=30;i++){
pulsewidth=(val*11)+500; //角度转化为500-2480的脉宽值
digitalWrite(13,HIGH);//将舵机接口电平至高
delayMicroseconds(pulsewidth);//延时脉宽值的微秒数
digitalWrite(13,LOW);//将舵机接口电平至低
delay(20-pulsewidth/1000);}
}
//小车右转向
void button6_callback(const String & state){
BLINKER_LOG("get button state: ",state);
val =140;
for(int i =0;i<=30;i++){
pulsewidth=(val*11)+500; //角度转化为500-2480的脉宽值
digitalWrite(13,HIGH);//将舵机接口电平至高
delayMicroseconds(pulsewidth);//延时脉宽值的微秒数
digitalWrite(13,LOW);//将舵机接口电平至低
delay(20-pulsewidth/1000);}
}
//小车方向回正
void button7_callback(const String & state){
BLINKER_LOG("get button state: ",state);
val =100;
for(int i=0;i<=30;i++){
pulsewidth=(val*11)+500;
digitalWrite(13,HIGH);//将舵机接口电平至高
delayMicroseconds(pulsewidth);//延时脉宽值的微秒数
digitalWrite(13,LOW);//将舵机接口电平至低
delay(20-pulsewidth/1000);}
}
void buttonLED_callback(const String & state){
digitalWrite(12,HIGH);
digitalWrite(15,HIGH);
}
void buttonled_callback(const String & state){
digitalWrite(12,LOW);
digitalWrite(15,LOW);
}
void setup()
{
// 初始化串口
Serial.begin(115200);
BLINKER_DEBUG.stream(Serial);
// 初始化有LED的IO
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, HIGH);
// 初始化blinker
Blinker.begin(auth, ssid, pswd);
// Blinker.attachData(dataRead);
//以下是将你创建函数组件注册进blinker,这样才能通过blinker控制
Button1.attach(button1_callback);
Button2.attach(button2_callback);
Button3.attach(button3_callback);
Button4.attach(button4_callback);
Button5.attach(button5_callback);
Button6.attach(button6_callback);
Button7.attach(button7_callback);
ButtonLED.attach(buttonLED_callback);
Buttonled.attach(buttonled_callback);
//以下是定义输出脚
pinMode(14,OUTPUT); //对应拓展版上的B-
pinMode(16,OUTPUT); //对应拓展板上的B+
pinMode(13,OUTPUT); //对应拓展版板上的~D9 ,舵机的信号控制引脚
pinMode(12,OUTPUT);
pinMode(15,OUTPUT);
BLINKER_LOG("系统已准备就绪!");
// B- B+ 用来控制电机的转向
}
void loop() {
Blinker.run(); //该函数让设备与手机保持持续的通讯
}
差不多就是这个样子。这样一个物联网小车就搞好了。
WiFi小车制作:
我做的WiFi小车是利用blinker软件进行操控的。小车是一个电机,一个舵机,因为这样控制方便程序比较简洁,线路接线少。我用到的控制板是wifiduino,和PM-R3拓展版(拓展版可以是其他的)。
WiFiduino大概就是这个样子:
这时要注意背面对应的引脚1
编程时定义的引脚是用背面的数值定义的。
现在先讲讲如何使用arduino IDE对wifiduino板子进行编程。
第一步:打开arduino IDE 找到文件→首选项。找到附加开发板管理器网址然后将网址输入
并保存。
第二步:在arduino IDE上找到工具→开发板→开发板管理器。点击开发板管理器:
搜索8266然后出现这个:
然后安装一个版本2.4.1或者最新版本(我安装的是最新版本)
安装好后选中工具→开发板,找到wifiduino并选中还有在工具里面找到编程器并选择第一个AVR ISP。在网上下载一个blinker库以espressif。具体网址我找不到了。
第三步:在手机上下载一个blinker软件。注册一个账号,进入软件点击在右上角的加号,添加一个Ardino设备,选择WiFi接入则会出现一个Secret Key,将该密匙几下,并放回我的设备。准备好后就可以开始编程了。
程序如下:
#define BLINKER_WIFI
#include
char auth[] = "f1db17ca3691"; //填入你在blinker上获得的密匙
char ssid[] = "HUAWEI P30"; //填入一个接入互联网的WiFi名称
char pswd[] = "123456789aa"; //填入该WiFi的密码
//int servopin=13;//定义舵机接口数字接口9
int myangle;//定义角度变量
int pulsewidth;//定义脉宽变量
int val;
// 新建组件对象 引号里面对应的是blinker上的数据键名
BlinkerButton Button1("btn-abc");
BlinkerButton Button2("btn-q");
BlinkerButton Button3("btn-t");
BlinkerButton Button4("btn-s");
BlinkerButton Button5("btn-z");
BlinkerButton Button6("btn-y");
BlinkerButton Button7("btn-h");
BlinkerButton ButtonLED("btn-led");
BlinkerButton Buttonled("btn-ledg");
// 按下按键即会执行该函数
//该函数是控制wifiduino板上的蓝色LED灯
void button1_callback(const String & state)
{
BLINKER_LOG("get button state: ", state);
digitalWrite(LED_BUILTIN, !digitalRead(LED_BUILTIN));
}
// 按下键则小车就会向前动
void button2_callback(const String & state)
{
BLINKER_LOG("get button state: ",state);
digitalWrite(16,HIGH);
digitalWrite(14,LOW);
}
//小车后退
void button3_callback(const String & state)
{
BLINKER_LOG("get button state: ", state);
// if(state=="on"){
digitalWrite(16,HIGH);
digitalWrite(14,HIGH);
}
//小车停下
void button4_callback(const String & state){
BLINKER_LOG("get button state: ",state);
digitalWrite(16,LOW);
digitalWrite(14,LOW);
}
// 如果未绑定的组件被触发,则会执行其中内容
//小车左转向
void button5_callback(const String & state){
BLINKER_LOG("get button state: ",state);
val =60;
for(int i =0;i<=30;i++){
pulsewidth=(val*11)+500; //角度转化为500-2480的脉宽值
digitalWrite(13,HIGH);//将舵机接口电平至高
delayMicroseconds(pulsewidth);//延时脉宽值的微秒数
digitalWrite(13,LOW);//将舵机接口电平至低
delay(20-pulsewidth/1000);}
}
//小车右转向
void button6_callback(const String & state){
BLINKER_LOG("get button state: ",state);
val =140;
for(int i =0;i<=30;i++){
pulsewidth=(val*11)+500; //角度转化为500-2480的脉宽值
digitalWrite(13,HIGH);//将舵机接口电平至高
delayMicroseconds(pulsewidth);//延时脉宽值的微秒数
digitalWrite(13,LOW);//将舵机接口电平至低
delay(20-pulsewidth/1000);}
}
//小车方向回正
void button7_callback(const String & state){
BLINKER_LOG("get button state: ",state);
val =100;
for(int i=0;i<=30;i++){
pulsewidth=(val*11)+500;
digitalWrite(13,HIGH);//将舵机接口电平至高
delayMicroseconds(pulsewidth);//延时脉宽值的微秒数
digitalWrite(13,LOW);//将舵机接口电平至低
delay(20-pulsewidth/1000);}
}
void buttonLED_callback(const String & state){
digitalWrite(12,HIGH);
digitalWrite(15,HIGH);
}
void buttonled_callback(const String & state){
digitalWrite(12,LOW);
digitalWrite(15,LOW);
}
void setup()
{
// 初始化串口
Serial.begin(115200);
BLINKER_DEBUG.stream(Serial);
// 初始化有LED的IO
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, HIGH);
// 初始化blinker
Blinker.begin(auth, ssid, pswd);
// Blinker.attachData(dataRead);
//以下是将你创建函数组件注册进blinker,这样才能通过blinker控制
Button1.attach(button1_callback);
Button2.attach(button2_callback);
Button3.attach(button3_callback);
Button4.attach(button4_callback);
Button5.attach(button5_callback);
Button6.attach(button6_callback);
Button7.attach(button7_callback);
ButtonLED.attach(buttonLED_callback);
Buttonled.attach(buttonled_callback);
//以下是定义输出脚
pinMode(14,OUTPUT); //对应拓展版上的B-
pinMode(16,OUTPUT); //对应拓展板上的B+
pinMode(13,OUTPUT); //对应拓展版板上的~D9 ,舵机的信号控制引脚
pinMode(12,OUTPUT);
pinMode(15,OUTPUT);
BLINKER_LOG("系统已准备就绪!");
// B- B+ 用来控制电机的转向
}
void loop() {
Blinker.run(); //该函数让设备与手机保持持续的通讯
}
差不多就是这个样子。这样一个物联网小车就搞好了。
举报
更多回帖
rotate(-90deg);
回复
相关问答
单片机
WIFI
智能小车
如何
去
实现
一种
基于ESP8266的物联网
智能
小车
呢
2022-02-22
1107
怎样
去
设计
一种
基于STM32F103芯片的
智能
小车
呢
2021-11-18
1511
怎样
去
设计
一种
基于STM32的
智能
小车
2021-10-11
1311
如何
去
制作
一种
基于51单片机的蓝牙
小车
呢
2021-12-21
1125
如何
去
实现
一种
基于C语言与Java的
WiFi
避障
小车
的设计
2021-11-10
1003
如何
去
实现
一种
基于stm32的
智能
小车
设计
2021-09-29
797
如何
去
制作
一
个基于STM32的
智能
小车
呢
2021-12-15
1267
怎样
去
设计
一种
基于Arduino Uno单片机的
智能
小车
呢
2022-02-21
949
如何
去
实现
一种
基于超声波测距模块的避障
智能
小车
呢
2021-11-26
1492
如何
去
实现
一种
基于MPU6050及卡尔曼滤波的平衡
小车
呢
2021-11-19
1098
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
英国威廉希尔公司网站
william hill官网 版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分


 举报
举报



