使用串口访问设备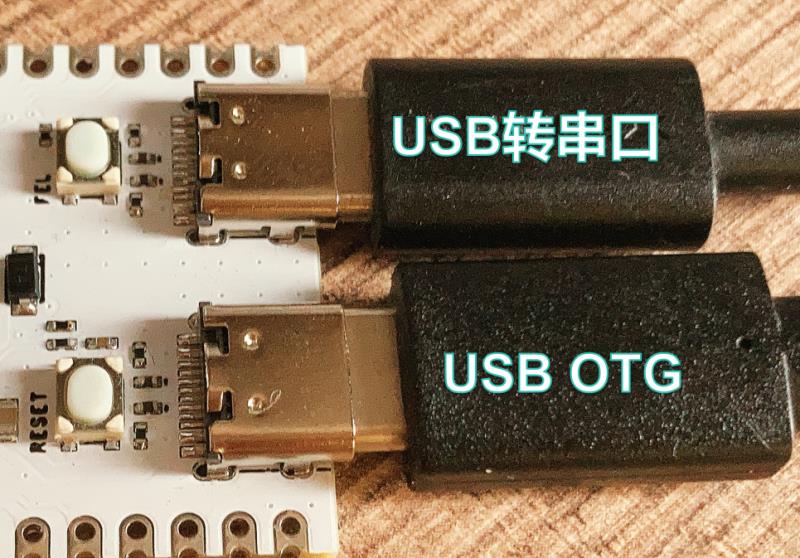
使用USB TypeC 连接线连接
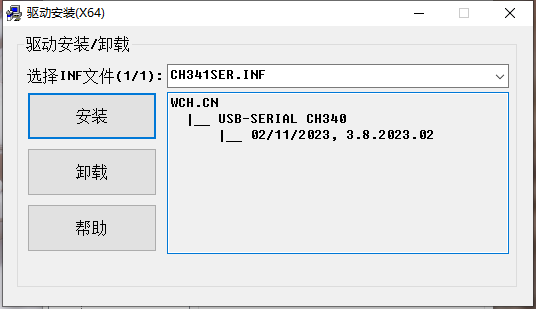
开发板 USB转串口 的接口,安装串口驱动程序:CH341SER.EXE
到设备管理器找到需要的串口,这里是 COM8
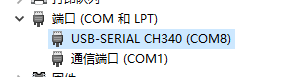
使用串口访问工具 PuTTY 打开串口,这里是 COM8,波特率 115200。
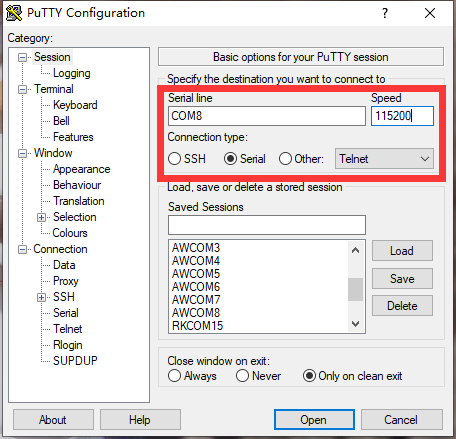
打开之后回车即可访问控制台。
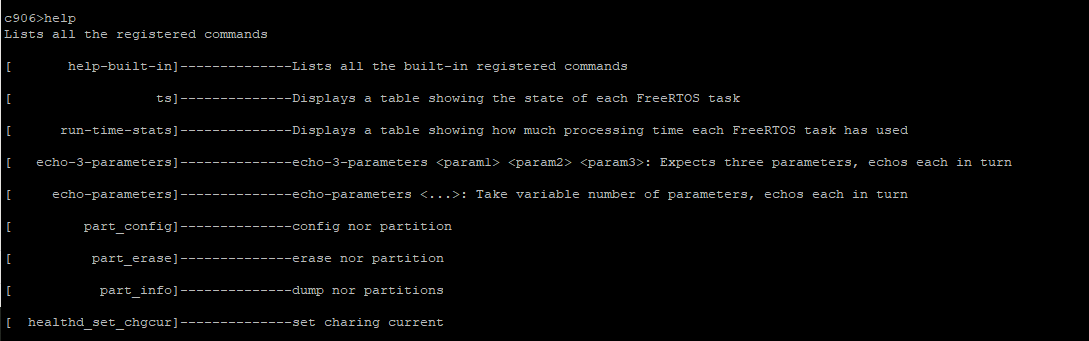
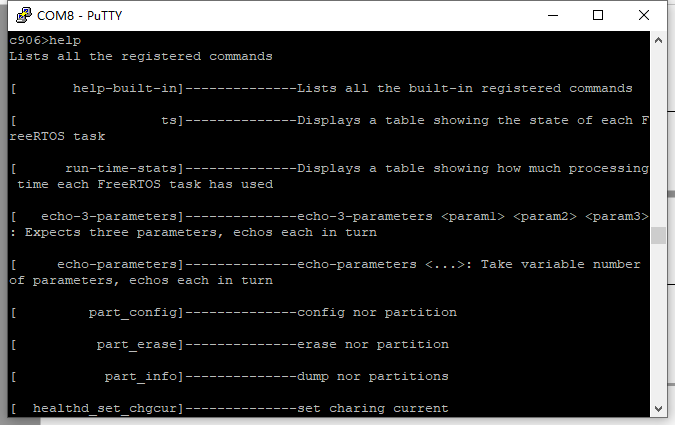
可以输入 help 命令查看支持的命令。
 查看三个核心运行频率
查看三个核心运行频率连接开发板的时候可以点击 RESET 按钮重置 CPU,查看输出。
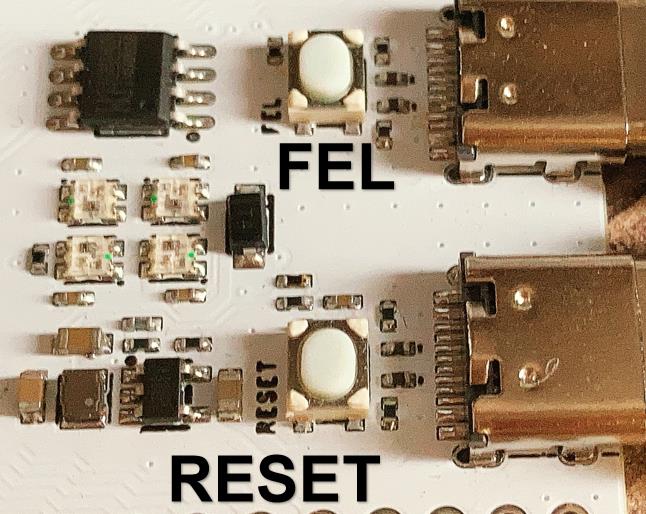
这里可以看到 M33 核心运行频率 192MHz,DSP 运行频率 400MHz,C906 运行频率 480MHz
 系统调试命令help
系统调试命令help code">help获取系统支持的终端命令
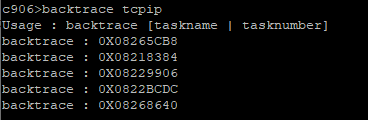
 backtrace
backtrace查看指定任务堆栈回溯信息
code">backtrace [taskname | tasknumber]
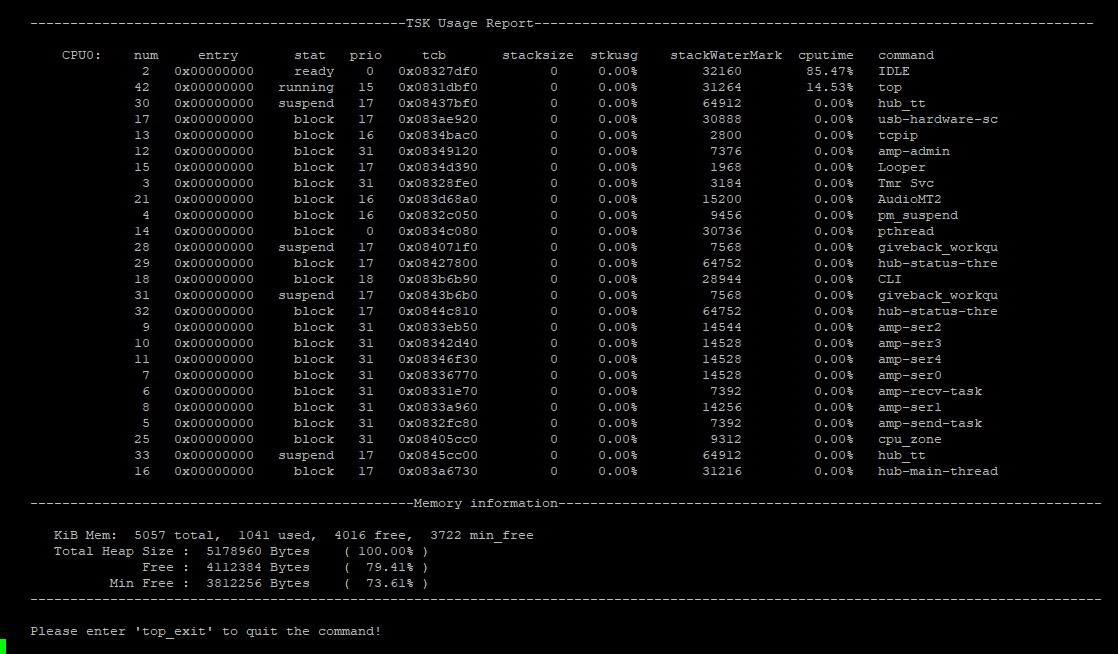
 top
top查看系统任务状态
code">top [‑d 2]
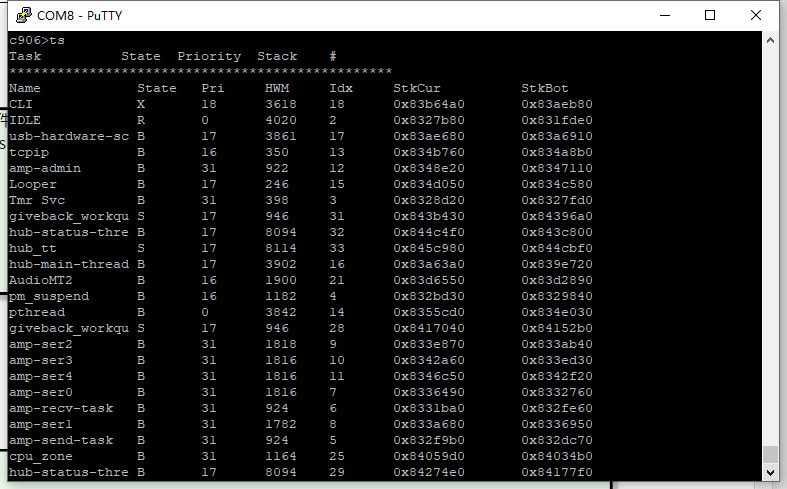
 ts
ts展示所有FreeRTOS任务的状态
code">ts
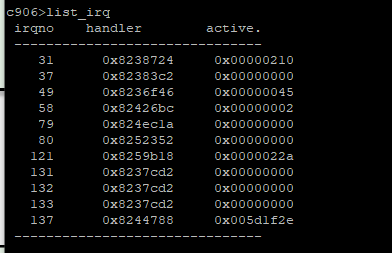
 list_irq
list_irq列出所有支持的中断及其状态
code">list_irq
 free
free查看系统堆的内存
code">free
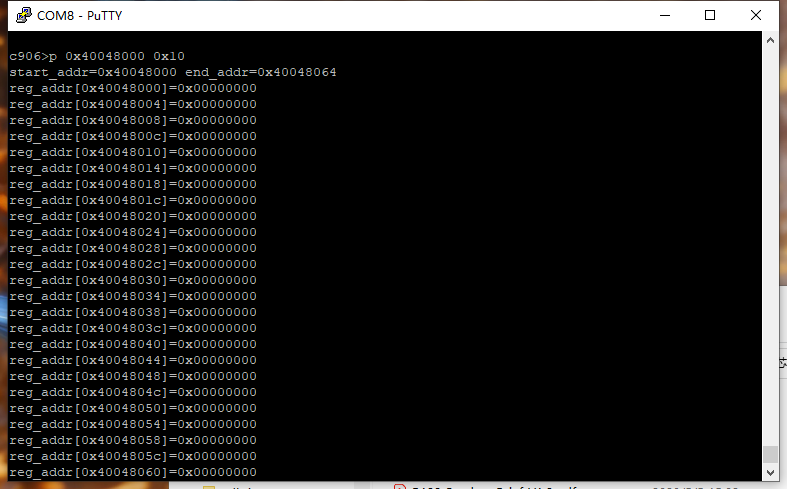
 p
p读取地址 reg_start_addr 对应长度 len 的内容
code">p [reg_start_addr] [len]
 m
m向地址 reg_address 写值 reg_value
code">m [reg_address] [reg_value]
 forkarg
forkarg修改fork命令参数,可设置fork命令创建的任务的优先级及其栈大小
code">forkarg [‑p priority] [‑s size]
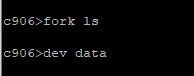
 fork
fork不占用控制台任务,在后台运行命令
code">fork command [arg1 ...]
 文件系统命令df
文件系统命令df查看文件系统剩余空间
code">df [path]
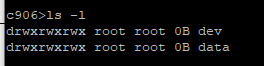
 ls
ls列出指定文件或者目录信息
code">ls [‑h] [‑l] [‑k] [file1]
 cat
cat以ACSII码的形式,读取指定的文件
code">cat
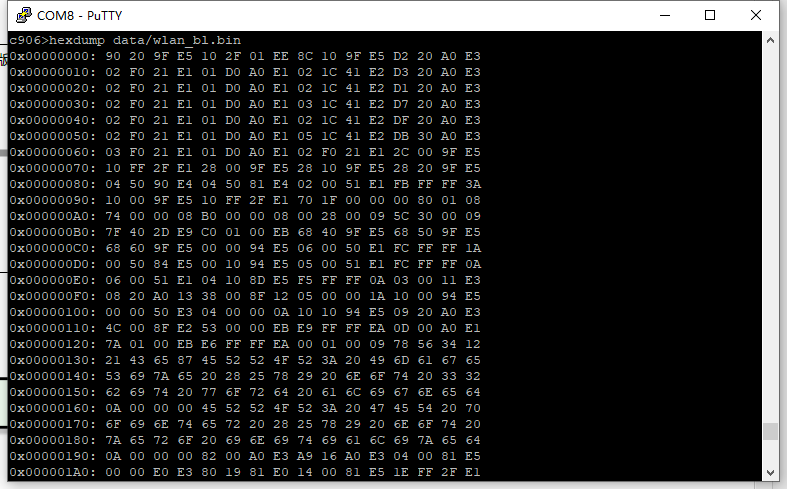
 hexdump
hexdump查看二进制文件内容
code">hexdump [‑n num] [‑C] file
 跨核心控制台
跨核心控制台由于 R128 同时运行三个独立的 RTOS,有些时候需要操作其他核心的 RTOS,每次都要在SDK切换控制台比较麻烦,所以可以使用跨核心控制台操作其他核心的 RTOS
命令: code">rpccli [
ARM|dsp|rv] commandname [arg0 ...]
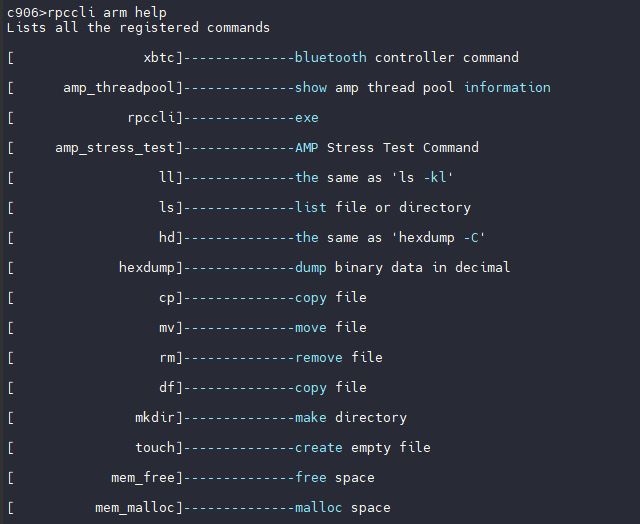
例子 code">rpccli arm help
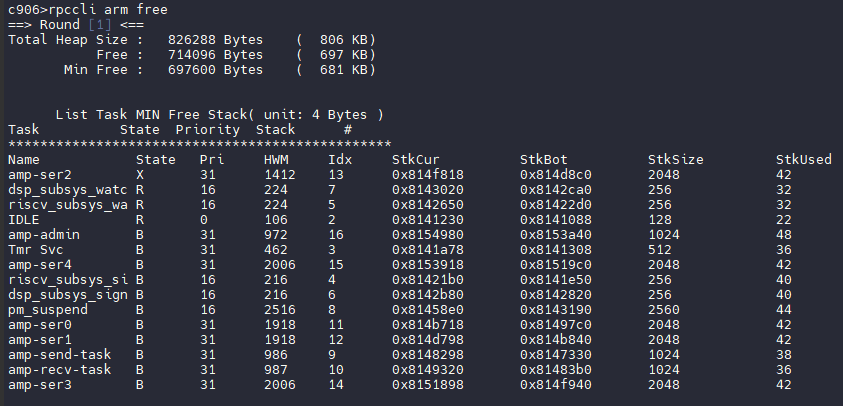
code">rpccli arm free
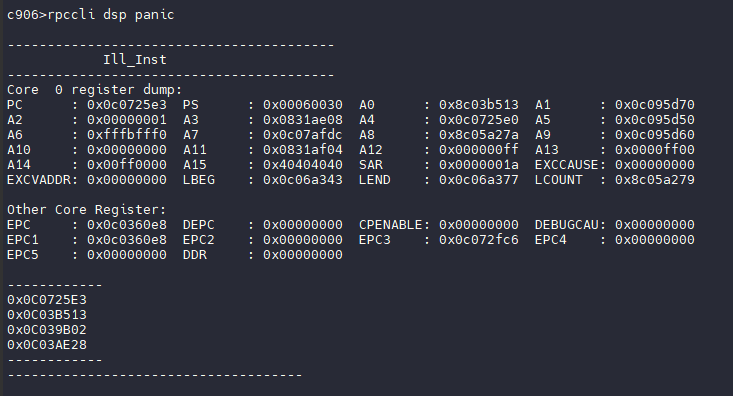
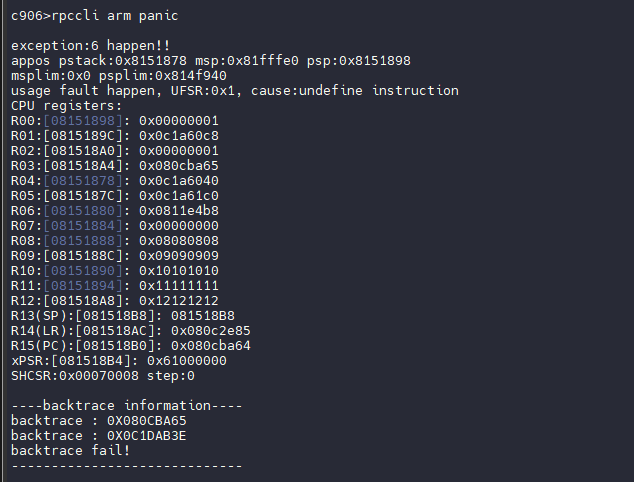
注意:PANIC 后控制台将无法操作
code">rpccli arm panic
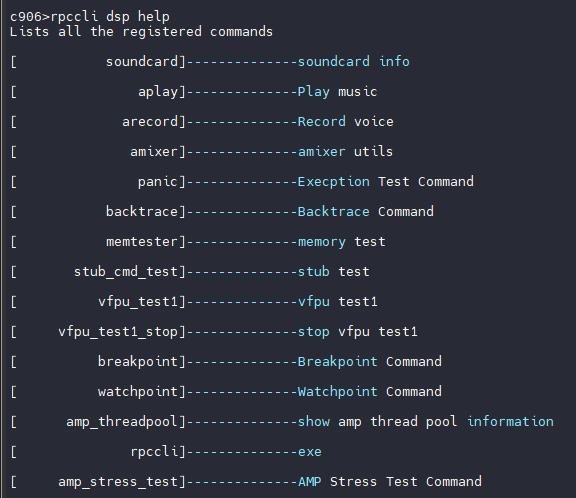
code">rpccli dsp help
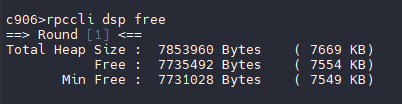
code">rpccli dsp free
code">rpccli dsp panic