基于正态分布变换(NDT)的实时三维SLAM方法

三维场景点云理解与重建技术
OpenPCDet环境配置
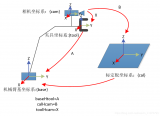
手眼标定的详细推导过程

基于隐式表达的大规模三维建图的方法
民用星载相机市场有哪些相机和图像传感器应用

NVIDIA拿下CVPR 2023 3D Occupancy预测第一名!

三维场景生成:无需任何神经网络训练,从单个样例生成多样结果
三维计算视觉研究分析
构建芯片节点的新方法介绍

基于从实景三维建模到数字孪生建模

基于深度学习的三维点云配准新方法

双目三维光学测量硬件系统结构设计
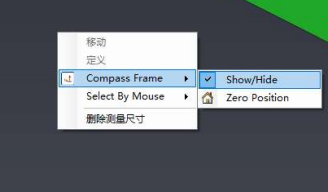
埃夫特工业机器人ER-Factory基本操作流程
光学三维形貌测量概述
视觉的机制
Point-NN: 即插即用,无需训练的非参数点云分析网络!
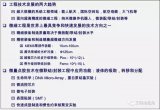
GTC 2023:3D技术位姿估计与预处理、 神经隐式曲面建模加速
三维重建:从入门到入土
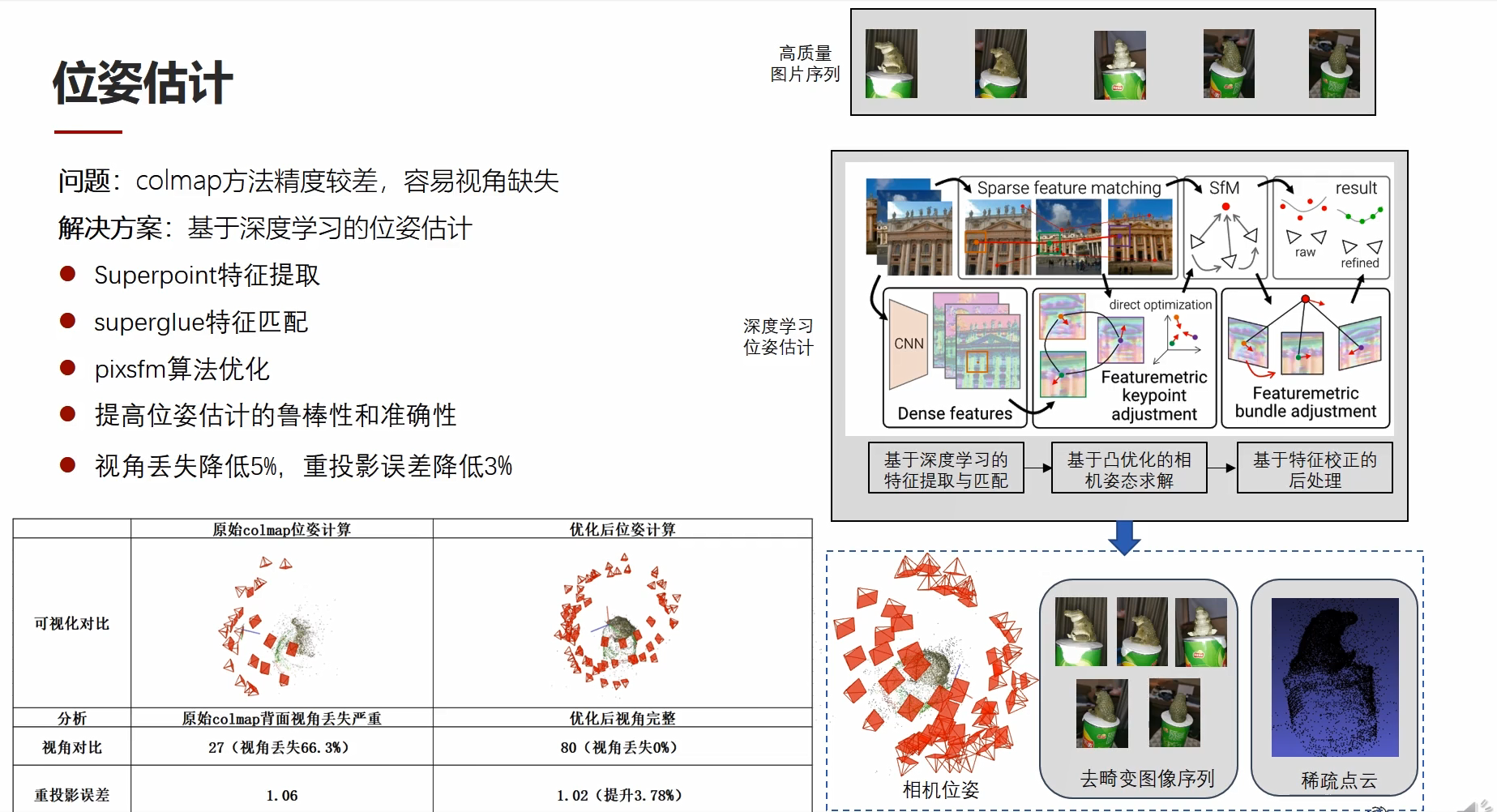
EMC计算方法和EMC仿真(8)三维(3D)制图

 下载APP
下载APP
 搜索内容
搜索内容
