伺服电机PID三环对伺服控制的影响
步进或伺服运动控制常见的偏位原因及对策
CClinkIE通讯的建立
伺服系统的惯量匹配原则
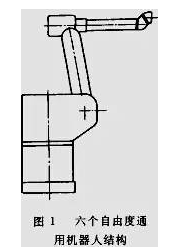
工业机器人操作机的设计方法和步骤
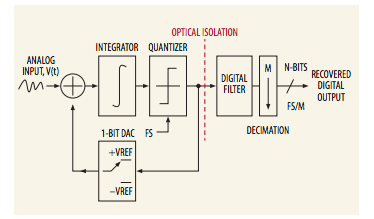
光电隔离Sigma Delta调制器框图解析
工业机器人的主要技术有哪些详细介绍
伺服控制的三种控制模式的差异
伺服控制的三种模式
伺服控制原点回归的必要性

三菱FX3U定位控制和伺服应用技术的详细介绍和原点回归指令说明
如何计算:伺服电机驱动工件在5S左右行走1m的距离?
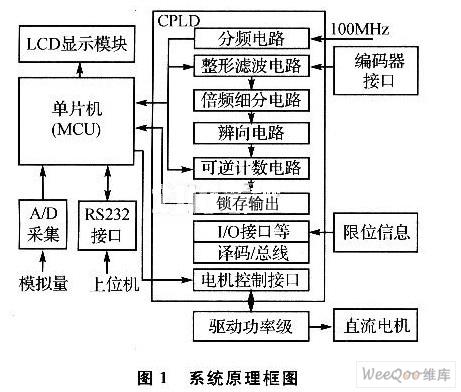
基于单片机和CPLD的高精度大型望远镜伺服控制器设计
浅谈电液伺服控制工作原理和功能应用
27个伺服控制中的震动的问题和解决对策
TMC4671基于硬件FOC伺服电机控制芯片适应BLDC/PMSM等
工业机器人之伺服控制、步进控制、变频控制详解

以DSP和FPGA技术为基础的伺服控制系统设计详解
这些产业链全景图,真的是太全了!
运动控制系统基本架构及控制轨迹要点简述

 下载APP
下载APP
 搜索内容
搜索内容
