
连接视觉语言大模型与端到端自动驾驶

康谋技术 | 高效环境感知:毫米波雷达数据采集、可视化及存储方案

使用PVA引擎优化自动驾驶汽车CV开发流水线
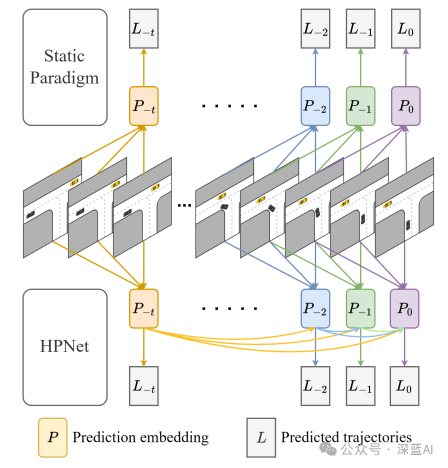
一种创新的动态轨迹预测方法

详解E2E-MFD多模态融合检测端到端算法

使用STT全面提升自动驾驶中的多目标跟踪

一种将NeRFs应用于视觉定位任务的新方法
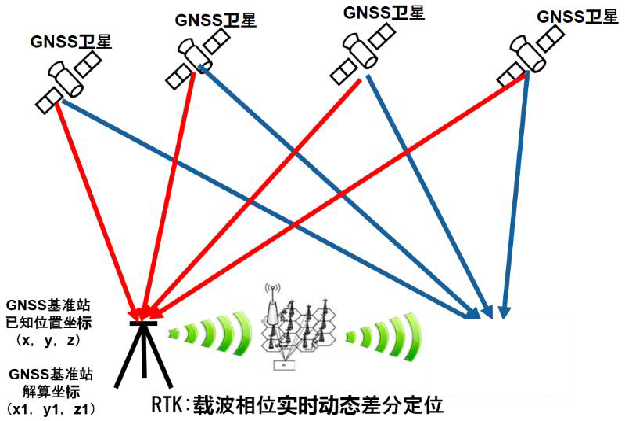
C-V2X联合RTK技术的场景仿真方案
轮毂电机的优缺点是什么?它有哪些优势?
端到端让智驾强者愈强时代来临?
人工智能的应用领域有自动驾驶吗

基于场景的自动驾驶验证策略
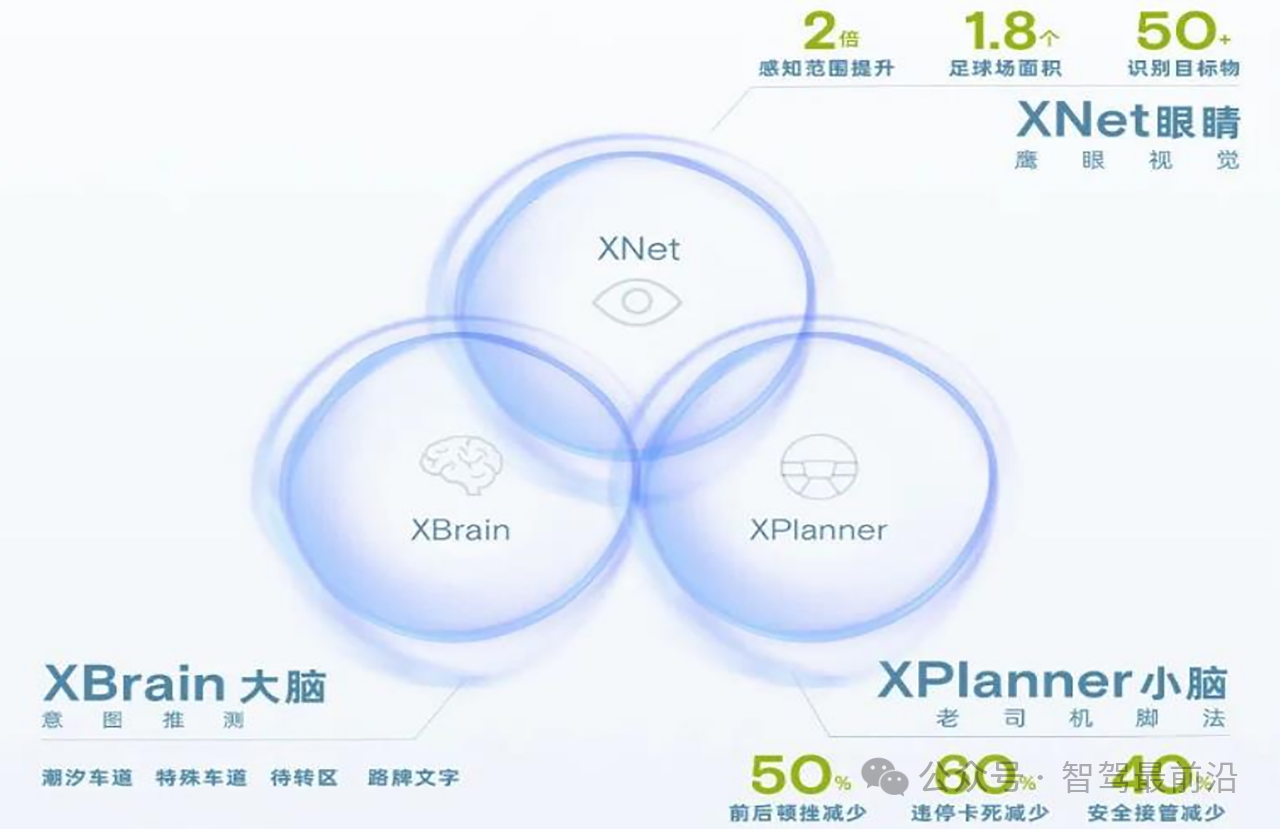
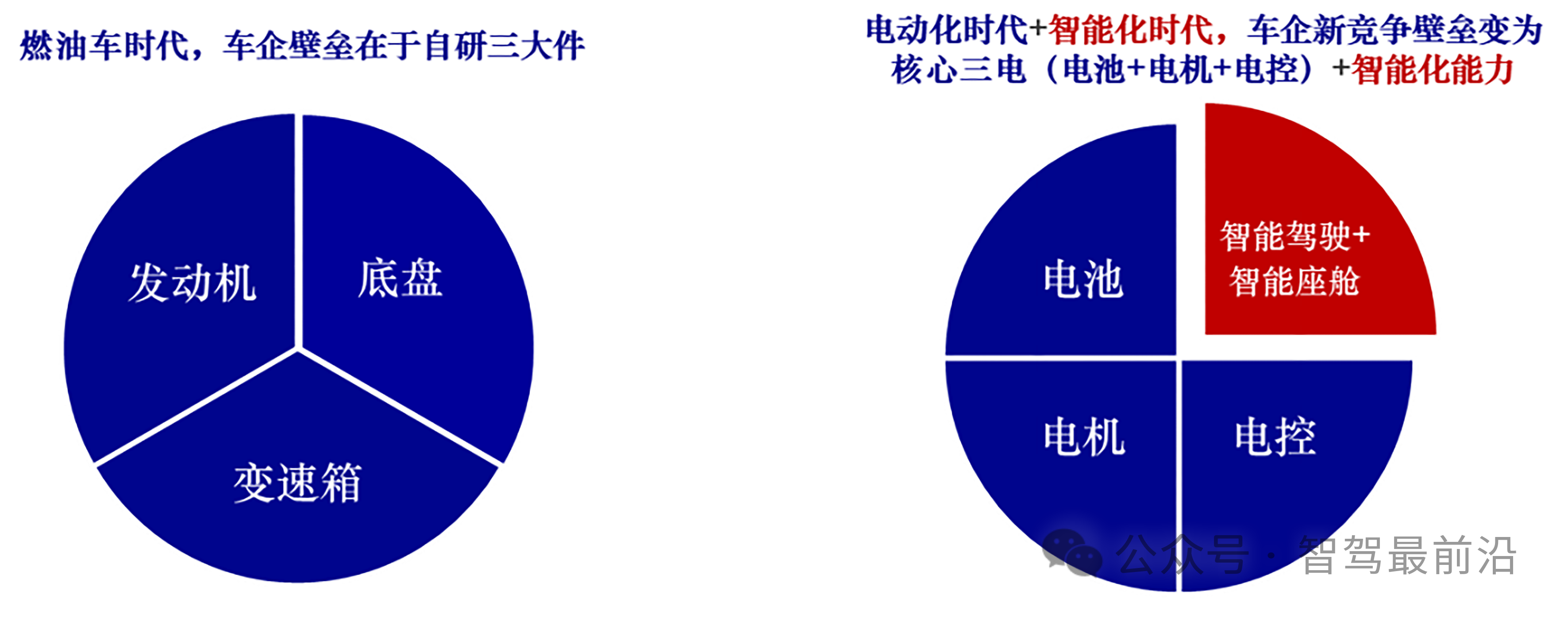
从小鹏、理想、蔚来布局看自动驾驶发展趋势
智能驾驶和自动驾驶区别是什么
无线通信最前沿的技术有哪些

康谋技术 | 毫米波雷达技术解析

设计仿真 | 基于VTD的V2X仿真应用
电容感应方向盘能用什么避开
索尼图像传感器335怎么样
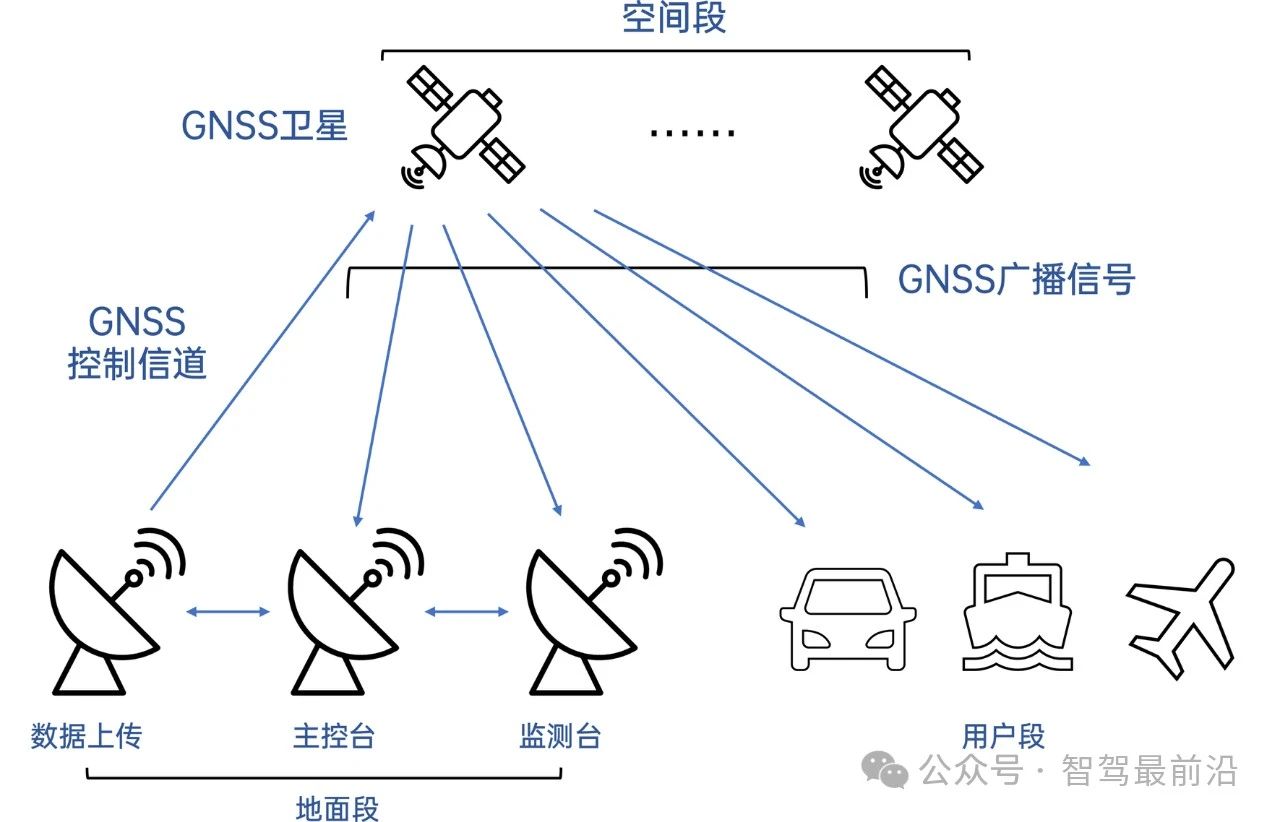
为什么自动驾驶中全球导航卫星系统如此重要?

 下载APP
下载APP
 搜索内容
搜索内容
