解决旭日X3派串口登陆时,控制窗口小的情况
剖析ROS编译教程
使用NVIDIA Isaac ROS Developer Preview 3构建高性能机器人应用
ROS教程(Xavier)
ROS常用指令
ROS机器人操作系统底层原理及代码剖析
ROS2概述和实践入门
介绍一款仿真器v2e
在ROS下面的一个组件实现Octomap显示
介绍一种基于液滴微流控的线粒体转移技术
NVIDIA Isaac ROS GEM的功能特性
Isaac仿真平台搭建以及ROS试用教程

使用myPalletizer人工智能套件实现颜色和图像识别
全新ROS 2 Humble硬件加速特性
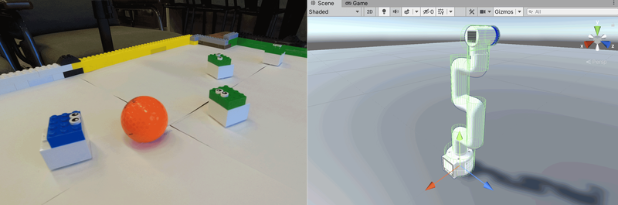
myCobot机械臂应用于Unity机器人编程实战课
AR机器人公司发布机器人操作系统(ROS)硬件加速框架ROBOTCORE
Micro-ROS:把ROS2放在MCU上
六轴机械臂免费使用,学习ROS、Python火热报名中
ROS2中使用Gtes示例的详细讲解
MCU在机器人行业里应该怎么玩

 下载APP
下载APP
 搜索内容
搜索内容
