


INDEMIND创新视觉技术助力机器人清洁模式革新

用于任意排列多相机的通用视觉里程计系统
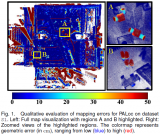
用于SLAM中点云地图综合评估的开源框架

一种降低VIO/VSLAM系统漂移的新方法
INDEMIND立体视觉技术让机器人落地更稳

Transformer是机器人技术的基础吗

利用VLM和MLLMs实现SLAM语义增强
开发小型机器人面临哪些难题
基于视觉语言模型的导航框架VLMnav
INDEMIND视觉导航技术赋能机器人行业
INDEMIND为具身智能量身打造通用性视觉感知技术
INDEMIND扫地机器人的核心技术
INDEMIND:机器人产业链的“卖水人”

一种完全分布式的点线协同视觉惯性导航系统

一种半动态环境中的定位方法

一种适用于动态环境的实时视觉SLAM系统

小型商用机器人,如何做到小而强呢?
视觉导航技术在扫地机器人的应用

视觉SLAM开源算法ORB-SLAM3原理与代码解析

机器人技术中常用的路径规划算法的开源库