



相关推荐
评论0

263 11
关于龙门双驱系统,你想了解的,这一条全讲明白#产品方案 #晶圆检测 #晶圆对位 #半导体检测
 三英精控
三英精控
219 11
6.2什么是系统的稳定性?为什么要研究稳定性?

194 11
8位机能不能带动这个小系统,感觉有压力
 YS YYDS
YS YYDS
200 11
[7.3.1]--6.3.1用变分法求解连续系统最优控制问题——终端时间固定问题_clip001

199 11
9.2系统状态模型的求解

199 11
2.4什么是时不变系统和因果系统

198 11
[4.5.1]--4.3.1物料储运系统自动化
198 11
[6.1]--5.1系统的状态反馈和输出反馈

197 11
2.5什么是动态与静态,开环与闭环,稳定与不稳定系统

197 11
3.1有哪几种系统时域分析方法

197 11
[3.4.1]--2.4离散时间系统状态方程的解_clip001

194 11
[1.4.1]--系统运动的稳定性1

194 11
[4.3.2]--4.3.2Unity3d动画系统

194 11
[6.3.1]--反馈系统的能控性和能观测性_clip002

192 11
[4.8.7]--工业机器人电气控制系统的构成2-2
192 11
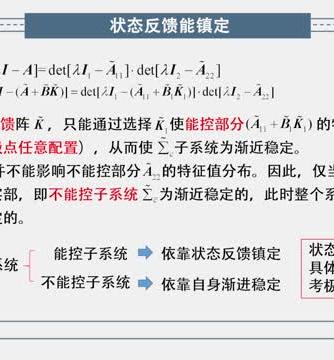
[6.3.1]--5.3系统镇定问题_clip002

192 11
[1.1.1]--系统的数学描述1_clip001

192 11
[6.1.2]--5.1.2线性反馈控制系统的基本结构和特性——闭环系统性能
192 11