



相关推荐
评论0
198 11
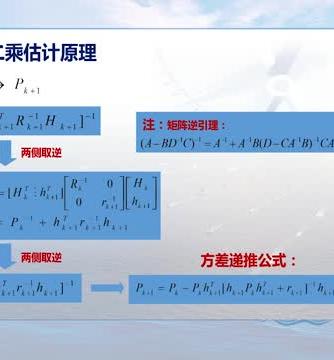
[4.2.3]--4.2.3递推最小二乘估计_clip002

198 11
[1.2.1]--1.2.1组合导航系统基本概念
197 11
[2.1.1]--2.1.1惯性导航系统简介_clip002
196 11
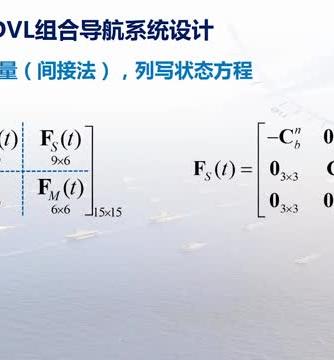
[5.3.1]--5.3INSDVL组合导航系统_clip002

194 11
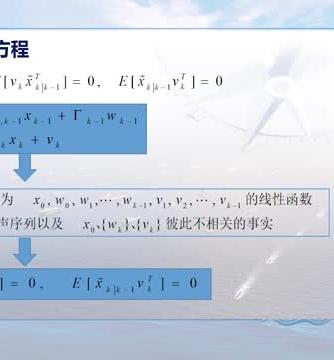
[4.4.3]--4.4.3卡尔曼滤波量测更新_clip001
194 11
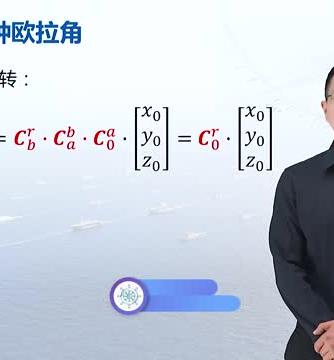
[1.2.4]--1.2.4欧拉角_clip002

193 11
[2.2.5]--2.2.5姿态矩阵更新_clip001
192 11
[4.2.2]--4.2.2加权最小二乘估计_clip002

192 11
[4.4.4]--4.4.4卡尔曼滤波贝叶斯推导_clip002
192 11
[4.4.3]--4.4.3卡尔曼滤波量测更新_clip002
192 11
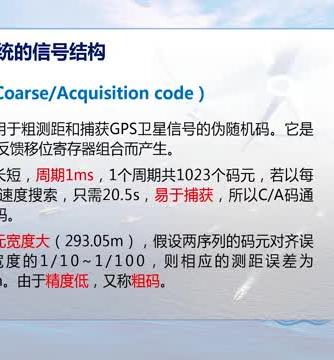
[3.1.2]--3.1.2卫星信号的结构与调制_clip002

191 11
[1.2.2]--1.2.2常见坐标系_clip001
191 11
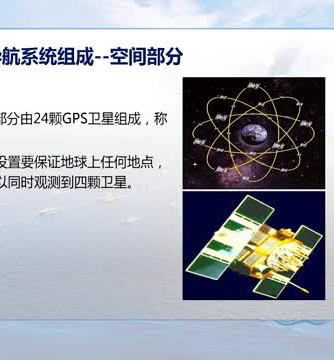
[3.1.1]--3.1.1卫星导航系统简介_clip002
189 11
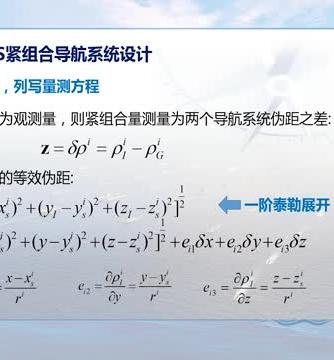
[5.2.2]--5.2.2INSGPS紧组合导航系统_clip002

188 11
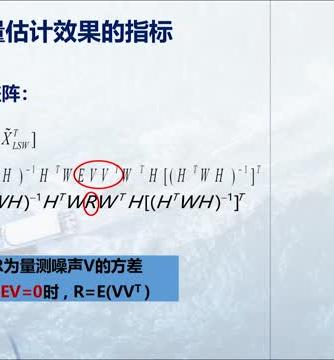
[4.3.2]--4.3.2线性最小方差估计

188 11
[3.1.1]--3.1.1卫星导航系统简介_clip001
187 11
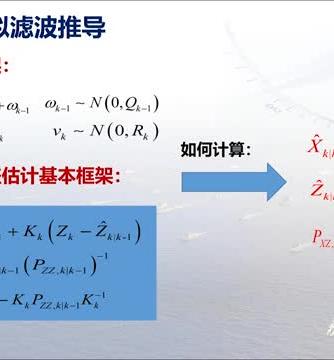
[4.5.1]--4.5.1高斯近似滤波_clip002

187 11
[2.2.2]--2.2.2比力方程
184 11
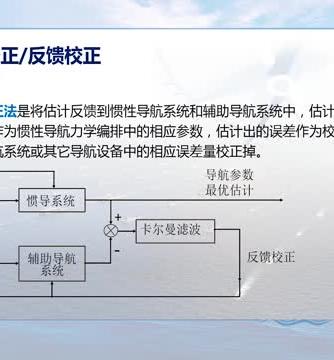
[5.1.1]--5.1组合模式_clip002

184 11