

模拟威廉希尔官方网站 设计之PID控制策略
模拟技术
描述
PID控制是最早发展起来的控制策略之一,由于其算法简单,鲁棒性好和可靠性高,被广泛用于工业控制当中。常规PID控制系统原理框图如下,该系统由模拟PID控制器以及被控对象组成。
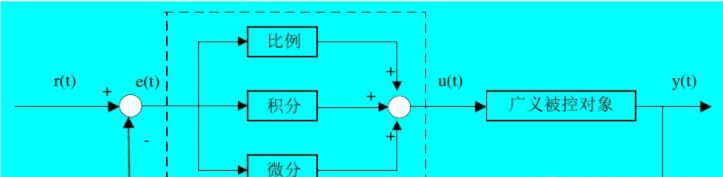
PID控制器是一种线性控制器,它根据给定值r(t)与实际输出值y(t)构成控制偏差:e(t)=r(t)-y(t)
将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制,故称PID控制器。其控制规律为:

式中:Kc - 比例系数;TI - 积分时间常数;TD - 微分时间常数。
一:PID 控制特点
原理简单,使用方便,适应性强:可以广泛应用于各个工业控制领域,鲁棒性强:即其控制品质对被控对象特征的变化不大敏感。
二:PID比例环节
P调节对偏差信号e(t)能够及时作出反应,无任何丝毫的滞后。输出u实际上是对起始值的增量,因此,当偏差e(t)为0时,u=0,并不意味着调节器没有输出,只说明此时u=u0。u0的大小是可以通过调整调节器的工作点加以改变的。简单来说,对于比例环节,偏差一旦产生,控制器就会立即产生控制作用,以减少偏差。
三:积分环节
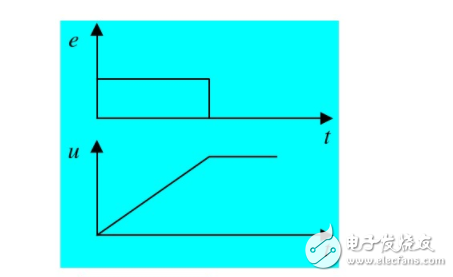
I调节器的输出不仅与偏差信号的大小有关,还与偏差存在的时间长短有关。只要偏差存在,调节器的输出就会不断变化,直到偏差为零,调节器的输出才稳定下来不再变化。所以积分调节作用能自动消除余差。注意I调节的输出不像P调节那样随偏差为零而变到零。
积分调节的特点就是无差调节,只要偏差不为零,控制输出就不为零,它就要动作到把被调量的静差完全消除为止。而一旦被调量偏差e为零,积分调节器的输出就保持不变。积分调节具有滞后性质,对于同一个被控对象,I调节比P调节进行得要缓慢,除非积分速度无穷大,否则I调节就不能像P调节那样及时对偏差加以响应,而是滞后于偏差的变化,它的滞后性使其难以对干扰进行及时控制。
所以在工业控制中,积分环节通常和其他控制策略一起使用。简单来讲,积分环节主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数TI,TI越大,积分作用越弱,反之则越强。
- 相关推荐
- 模拟威廉希尔官方网站
- PID
-
基于labview的模拟PID控制2011-12-02 0
-
想寻找模拟PID威廉希尔官方网站 设计资料2017-07-15 0
-
怎么实现气体传感器PID脉宽恒温控制威廉希尔官方网站 设计?2021-05-13 0
-
采用了PID控制器的闭环控制策略2021-08-23 0
-
PID调节控制电机速度学习(一)之模拟PID控制 精选资料推荐2021-09-01 0
-
神经网络PID控制策略及其Matlab仿真研究2009-09-14 456
-
燃烧控制系统GPC-PID串级控制策略2009-12-08 885
-
消防模拟训练环境控制系统硬件威廉希尔官方网站 设计2010-01-25 434
-
浅谈模拟PID威廉希尔官方网站 的学习与辨识2010-04-16 2034
-
数字PID控制实验2009-05-15 8077
-
位置伺服系统PID控制策略研究与应用2016-04-01 775
-
威廉希尔官方网站 设计中的模拟地与数字地2016-10-10 1177
-
模拟PID威廉希尔官方网站 的温控系统设计2017-11-06 1927
-
模拟PID调节器的设计2017-11-24 25747
-
使用热敏电阻模拟模拟PID温度控制2022-11-28 682
全部0条评论

快来发表一下你的评论吧 !
