

无人机飞控算法的发展历程简述
军用/航空电子
描述
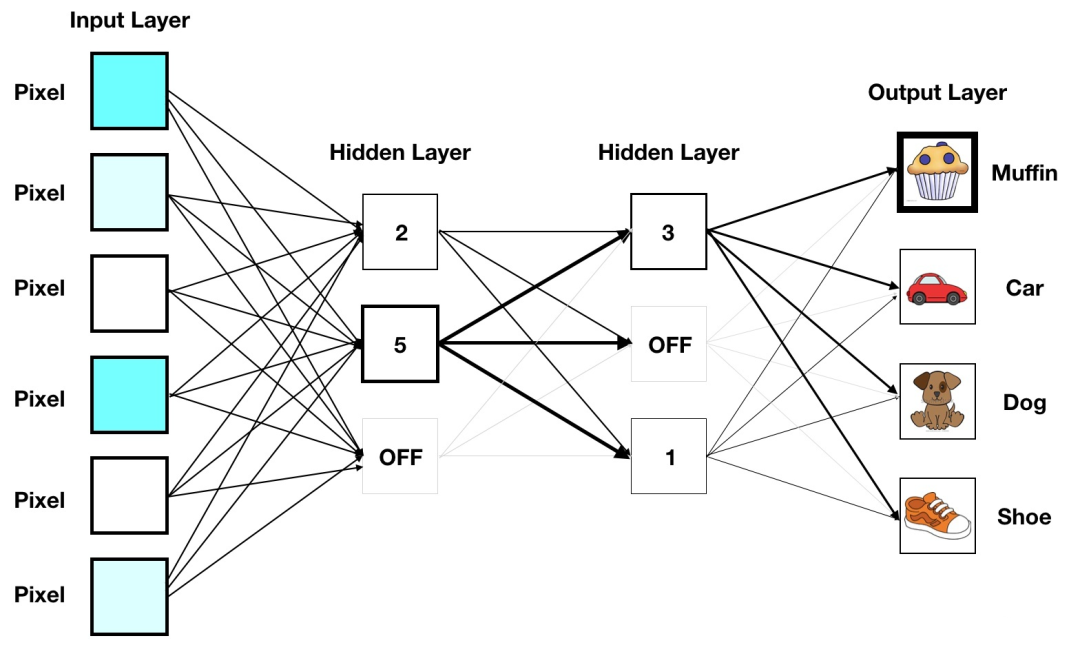
YOLO(You Only Look Once)是检测图像中物体的神经网络架构。它将原始图像分成13个小方块,每个方块记录有关物体及其类型的信息,以此进行识别。YOLO有别于同类架构,一次图像扫描即可确定识别对象的存在和种类。现代无人机为快速发现物体使用最新版的YOLOv5神经网络架构。通常,这款神经网络能在视频中发现物体,分析人的举动或汽车自动导航。尽管颇受欢迎,但却有一系列缺陷。比如,算法本身模式既长又复杂,给寻找小型物体造成困难。就读于顿河畔罗斯托夫市俄罗斯南联邦大学的中国博士生张精卫对此缺陷进行了修正,与YOLOv5相比,改善后的算法明显降低了计算量。他在接受俄罗斯卫星通讯社采访时说:
“我在俄罗斯南联邦大学的科研内容是数学算法研究,目前的研究是在YOLOv5模型的基础上进行了改进,提出了L-YOLO算法,提升了模型对小目标的检测性能,同时降低模型的参数量和计算量,以解决无人机视角下的小目标检测任务。本研究得出的结论为:L-YOLO算法不仅对小目标的检测性能更强,模型也更加轻量化,证实了在无人机视角下的目标检测具有良好的应用前景。低功耗的无人机视角下的小目标检测研究对于提高无人机应用的效率和功能,推动科技发展和社会进步,具有非常重要的意义。”
无人机配置轻量和更具效率的L-YOLO算法,可用于各种领域,从农业到搜救工作。任何情况下,识别和跟踪小物体,如个人、动物或车辆的算法,对于成功完成任务至关重要。
近年来,中国在无人机领域取得了巨大的进步和突破。作为无人机技术的关键组成部分,无人机算法在提高飞行性能、实现智能化操作和拓展应用领域方面发挥着重要作用。本文将介绍中国在无人机算法发展方面的创新成果和发展现状,并展望未来的发展趋势。
一、无人机飞控算法的基础
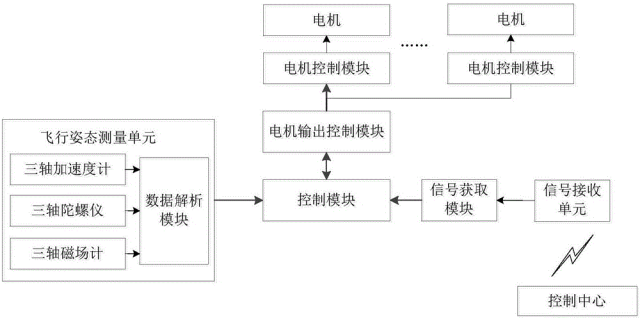
无人机飞控算法的基础是飞行动力学和控制理论。飞行动力学研究飞机在空气中的运动规律,包括姿态控制、稳定性和操纵性等方面。控制理论研究如何设计控制器来实现期望的飞行动作和轨迹。这些基础理论为无人机飞控算法的设计和优化提供了理论基础。
二、无人机飞控算法的发展历程
01、初期阶段: 在无人机技术刚刚起步的初期,飞控算法主要采用传统的控制方法,如PID控制器。PID控制器通过调节比例、积分和微分参数来实现对飞机的控制。这种方法简单易懂,但对于复杂的飞行任务和环境变化较大的情况下效果有限。

02、进阶阶段: 随着无人机技术的发展,飞控算法逐渐引入了更加先进的控制方法和算法。例如,模型预测控制(MPC,Model Predictive Control)可以通过建立飞行动力学模型和优化算法来实现对飞机的控制。这种方法可以考虑到飞机的动力学特性和约束条件,提高了飞行控制的精度和稳定性。
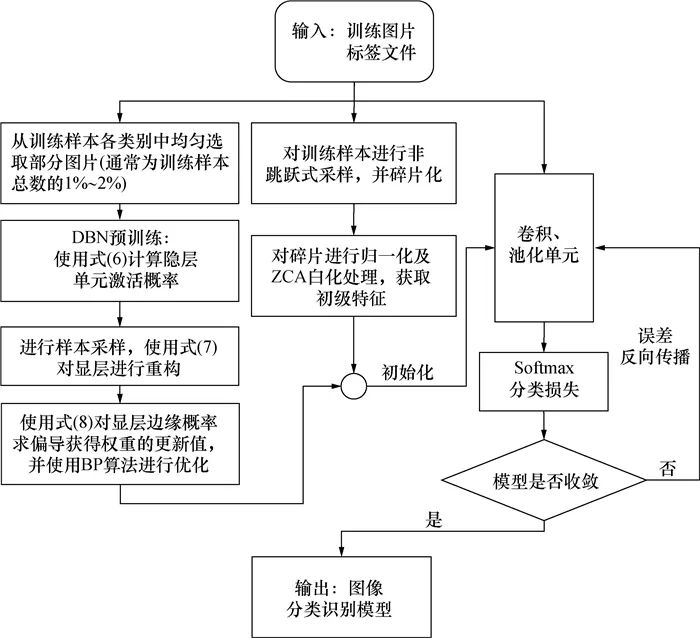
03、深度学习应用: 近年来,深度学习技术在无人机飞控算法中得到了广泛应用。深度学习可以通过训练神经网络来学习复杂的飞行控制策略和模式。例如,卷积神经网络(CNN,Convolutional Neural Network)可以用于图像识别和目标跟踪。循环神经网络(RNN,Recurrent Neural Network)可以用于序列数据的处理和预测。这些深度学习算法可以提高无人机的自主飞行和感知能力。
三、飞行控制算法的创新
01、姿态控制算法:中国的无人机企业通过创新性的姿态控制算法,实现了无人机的稳定飞行和高机动性能。例如,基于自适应控制理论的控制算法,可以实现对无人机在各种复杂环境下的精确控制,提高飞行稳定性和机动性。
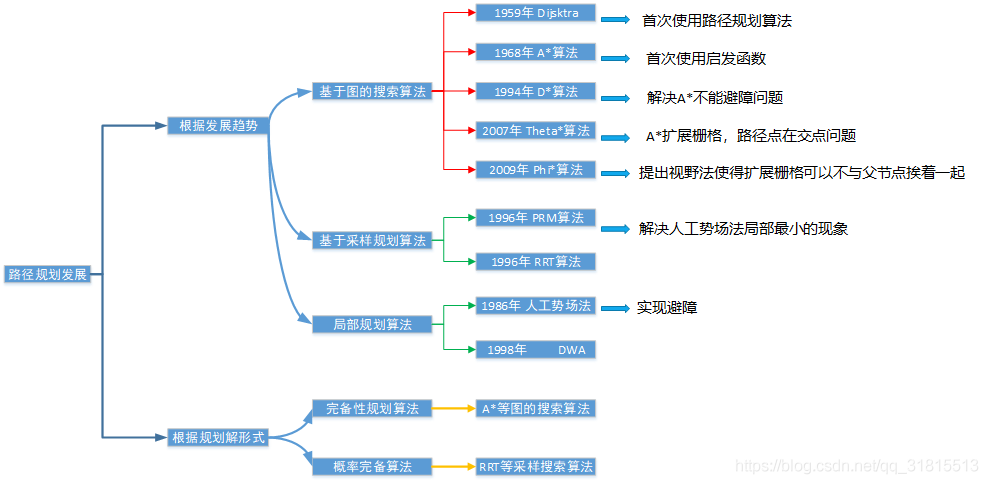
02、路径规划算法:无人机的路径规划算法是实现自主飞行和避障的关键。引入遗传算法、人工势场算法等先进的路径规划算法,提高了无人机的自主飞行能力和安全性。这些算法可以帮助无人机在复杂的环境中寻找最佳路径,并避免障碍物,实现高效而安全的飞行任务。
四、智能化操作算法的发展
01、图像识别算法:无人机通过图像识别算法可以对地面目标进行实时识别,实现对目标的跟踪、监测和分析。引入深度学习、卷积神经网络等先进的图像识别算法,提高了无人机对目标的识别准确性和实时性,为无人机在军事、安防等领域的应用提供了强有力的支撑。
02、感知决策算法:无人机的感知决策算法是实现自主导航和智能操作的关键。引入机器学习、强化学习等算法,使无人机具备了自主规划航线、自主避障和自主执行任务的能力。这些算法可以使无人机更加智能化、自主化,提高无人机的应用范围和操作效率。
五、中国无人机飞控算法的应用
01、自主飞行:中国的无人机飞控算法可以实现无人机的自主飞行能力。通过结合传感器数据和飞行控制算法,无人机可以实现自主起飞、航线飞行、自主降落等功能。这为无人机的应用提供了更大的灵活性和安全性。
02、目标跟踪:无人机飞控算法可以实现对目标的自动跟踪和识别。通过图像处理和深度学习算法,无人机可以实时识别和跟踪目标,如车辆、人物等。这在军事侦察、安防监控和救援等领域具有重要应用价值。
03、群体协同:中国的无人机飞控算法还可以实现多架无人机的群体协同飞行。通过无线通信和分布式控制算法,多架无人机可以实现协同任务,如搜索救援、巡航监测等。这为无人机的应用提供了更大的扩展性和效率。 2023年9月5日,创衡控制在原固定翼集群编队飞控的基础之上,推出多旋翼集群编队功能,形成S60N、S40N、S30N系列编队飞控,支持四旋翼、六旋翼、八旋翼、垂直起降固定翼等机型: ● 支持50架机集群编队组网(可定制100架机集群编队); ● 支持一字形、三角形、扇形攻击等多种阵型,空中可变换; ● 支持机间实时组网通讯,短时组网中断可保持阵型,超出保护时间则单机按预装订航线继续飞行; ● 支持多架备用长机,飞行中可一键切换长机、从机编队位置; ● 一键集结,一键解散,可随时操控指定单机; ● 支持飞控在环的编队仿真(飞控内嵌数字飞机模型)。集群编队飞行
六、未来展望
01、强化学习:强化学习是一种通过试错和奖惩机制来优化控制策略的方法。将强化学习应用于无人机飞控算法可以进一步提高无人机的自主飞行和决策能力。
02、安全性和和鲁棒性:无人机的安全性和鲁棒性是无人机技术发展的重要方向。无人机飞控算法需要考虑到各种异常情况和故障,提高无人机的安全性和可靠性。例如,无人机飞控算法可以设计故障检测和容错机制,以及自适应控制算法,使无人机能够应对各种不确定性和干扰。
03、智能决策和规划:随着无人机应用场景的不断扩展,无人机飞控算法需要具备智能决策和规划能力。例如,在复杂的环境中,无人机需要能够根据任务需求和环境条件做出智能的飞行决策和路径规划,以实现高效、安全的飞行。 未来,随着技术的不断创新和发展,无人机飞控算法将进一步提高无人机的自主性、感知性和安全性,推动无人机技术在各个领域的应用和发展。 来源:俄罗斯卫星通讯社、华兴通盛、创衡控制等;版权归原作者所有,转载目的在于传递更多信息,传播相关技术知识;若侵犯了您的合法权益,请及时联系我们删除。
编辑:黄飞
-
第二集 知语云智能科技无人机反制技术与应用--无人机的发展历程2024-03-12 0
-
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理2024-03-12 0
-
限制无人机发展的因素有哪些2016-06-08 0
-
无人机飞手紧缺 看无人机行业发展趋势如何?2016-06-28 0
-
求职:无人机飞控算法实习岗位2016-07-10 0
-
无人机你们是知道了,那么反无人机有几个会知道?2016-09-26 0
-
无人机系列之飞控系统2018-09-25 0
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 0
-
【设计技巧】无人机系列之飞控算法2019-07-14 0
-
无人机飞控系统2021-07-21 0
-
如何利用一颗MCU搞定无人机的电机驱动+飞控算法?2021-09-24 0
-
如何实现大四轴无人机的飞控设计2021-11-11 0
-
无人机技术飞控之飞控算法与操作系统教学PPT下载2018-01-15 892
-
无人机发展历程简述,5G时代工业无人机如虎添翼2019-07-17 8587
-
无人机飞控的三大算法是什么,具有什么特点应用2020-09-24 2794
全部0条评论

快来发表一下你的评论吧 !
