

基于DSP和增量式PI电压环控制的逆变器研究
电源设计应用
描述
基于DSP和增量式PI电压环控制的逆变器研究
摘要:研究了一种基于数字控制的逆变器,该方案采用电压瞬时值环控制,以提高输出稳定性,同时兼顾输出动态性能。反馈威廉希尔官方网站 中采用增量式PI法则,并对PI增量及PI输出进行限幅控制,避免因误扰动造成输出的不稳定,进一步确保系统的稳定性与动态性能。采用TMS320LF2407A来实现算法,并进行了一个输出最大值为200V,输出功率为500W的逆变器实验。
关键词:逆变器;电压环控制;增量式PI;DSP控制
0 引言
目前,逆变器应用最为广泛的PWM技术中,SPWM控制具有很多优点。其控制技术主要有电压瞬时值单环反馈、电流瞬时值单环反馈、电压电流双环反馈环控制及电压空间矢量控制。电压环使系统有较好的稳定性,瞬时值反馈则增强系统的动态性能[1]。电压环采用PI控制,其中比例环节及时反映控制系统的偏差信号,偏差一旦产生,控制器立即产生控制作用,以减少偏差;积分环节主要用于消除静差,提高系统的无差度。相对于位置式控制,增量式控制误动作影响小,必要时可以用逻辑判断的方法去掉;且手动/自动切换时冲击小,便于实现无扰动切换;同时其算式中不需要累加,比较容易通过加权处理而获得比较好的控制效果[2]。
相对于数字控制,传统的模拟控制已暴露诸多缺点:需要大量的分立元器件和威廉希尔官方网站 板,制造成本比较高;大量的模拟元器件使其之间的连接相当复杂;模拟器件的老化问题和不可补偿的温漂问题,以及易受环境干扰等因素都会影响控制系统的长期稳定性。随着微处理器的可靠性与质量的不断提高,数字控制已经在逆变控制中占据着主导地位[3],本文提出了一种基于DSP控制的方案。
1 逆变器建模
单相全桥逆变器如图1所示,E为输入直流电压,S1~S4为开关管,L为滤波电感,r为电感等效内阻,C为滤波电容,R为负载。

图1 单相全桥逆变器
将电感用Ls表示,电容用1/Cs表示,可推导出输出电压Vo(s)与AB两点间电压Vi(s)之间的传递函数G(s)如式(1)所示。
G(s)= =
= (1)
(1)
忽略电感等效内阻,则式(1)可简化为
G(s)= (2)
(2)
在一个开关周期中,当S1及S4导通时,vi为-E;当S2及S3导通时,vi为E。由于开关频率与输出频率相比为400,故一个开关周期中可以用平均值代替瞬时值。
vi=ED+(-E)(1-D)=(2D-1)E(3)
本方案采用双极性SPWM,故
D= (4)
(4)
式中:vm为正弦波信号,vm=Vmsinωt;
Vtri为三角载波峰值。
则调制比M为
M= (5)
(5)
将式(5)代入式(3)可得
vi≈ (6)
(6)
转化为频域有
 (7)
(7)
由式(7)与式(1)可得式(8)

 (8)
(8)
此即逆变器输出传递函数,由此可得逆变器的等效框图如图2所示。

图2 逆变器等效框图
2 控制方案设计
本系统采用电压环反馈,为提高动态性能,采用瞬时值控制。电压环控制中,采用增量式PI控制,同时对其算法进行了优化,确保输出具有较好的稳定性。控制器采用TI公司的TMS320LF2407A,其最高工作频率可达40MHz,能够较好地实现以上算法。
2.1 电压环设计
忽略电感等效内阻,电压环等效框图如图3所示。
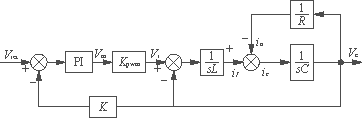
图3 电压环等效框图
图中:Kpwm为PWM环节等效增益,其大小为调制波到逆变器AB两端输出的增益;
K为反馈回路中的电压采样系数。
图3可简化为图4。

图4 电压环简化框图
图中Kpwm系数已归于PI模块中。逆变器开关频率取为20kHz,输出为工频,则取LC滤波器的转折频率fn为1kHz,综合考虑电感电流纹波与压降,取L=1mH,C=10μF。本实验取满载时R=40Ω。
设PI环节传递函数为
G(s)=Kp+ (9)
(9)
则系统的开环传递函数为
G(s)=K
 (10)
(10)
取PI补偿频率为500Hz,而系统的穿越频率为1kHz。则由式(10)可得
 =2π×500(11)
=2π×500(11)
 =1(12)
=1(12)
式中:K为采样系数,实验中设计为0.014。
联立式(11)及式(12)可得
kp=39 ki=124416
其波特图如图5所示。
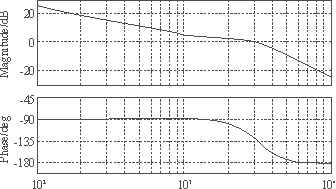
图5 电压环波特图
从图5中可以看出,系统相角裕度为60°,满足稳定性要求。图6为仿真所得的输出波形。
从图6中可看出,输出波形为正弦波,幅值为200V,频率为50Hz,与设计值相符。

图6 逆变输出波形
2.2 增量式PI算法及其优化
PI环节的传递函数为式(9),其对应的时域方程式为
y(t)=kp (13)
(13)
式中:y(t)为PI输出;
e(t)为PI差动输入;
Ti为积分时间常数;
kp为比例系数。
对式(13)离散化得
yk=kp (14)
(14)
式中:Ts为采样时间。
这即是位置式PI控制,而若采用增量式PI控制,可避免误动作,同时运算不需要累加,对数字控制尤其方便。由式(14)可得
yk-1=kp (15)
(15)
由式(14)与(15)可得
yk=yk-1+kp ek-kp·ek-1(16)
ek-kp·ek-1(16)
式(16)为一般的增量式PI算法,但实际控制中,很多不稳定因素易造成增量较大,甚至比输出还大,进而造成输出波形不稳定,因此,必须对增量式PI算法进行优化。本方案采用饱和区判断法则,即对增量
Δyk=kp ek-kp·ek-1(17)
ek-kp·ek-1(17)
进行判断,当其绝对值越过某一上限ΔYlim,即进入饱和区时,将ΔYlim赋予绝对值。但是,即使对增量进行饱和区判断后,其输出由于累加的结果,也可能很大,甚至超过载波幅值。因此,也必须对PI输出进行限幅处理,此时,可以以调制波幅值作为限幅值,也可简单地以载波幅值作为限幅值,等稳定后这个幅值将不会超过调制波幅值。
2.3 DSP控制算法的实现
TI公司的TMS320LF2407A的最高工作频率可达40MHz,存储结构为哈佛结构,数据、程序和I/O空间的寻址区域均可高达64k,且相互独立,片内则有32k的flash空间。同时片上具有A/D模块,其分辨率为10位,片上还具有PWM输出口,能实现同相、反相输出,还能添加死区控制,能较好地完成电压环控制算法的实现[4]。
程序中采用最高工作频率40MHz,开关频率为20kHz,运用定时器的周期中断,使用连续增或者减模式,产生对称的三角载波。设置比较输出使能,利用比较寄存器CMPR1和CMPR2的值控制PWM1~PWM4的输出,产生两路同相和反相的PWM信号,控制开关管的开通和关断。同时为避免上下桥臂同时导通,程序中加入0.5μs的死区控制。而CMPR1与CMPR2的计算,则由每一个周期中断给出。周期中断时,通过采样电压反馈值,经过优化的PI增量式控制后,产生占空比D,由D与定时期周期即可得CMPR1和CMPR2的值。图7为周期中断的程序流程图。

图7 周期中断流程图
3 实验结果
实验主威廉希尔官方网站 为单相全桥威廉希尔官方网站 ,如图1所示,其中开关管采用20N60S的MOS管,滤波电感取1mH,滤波电容取10μF,负载R取40Ω,输入直流电压为250V,开关频率取20kHz。PI算法中比例系数取39,积分时间常数取(1/3140)s。
图8为输出电压波形,从图8中可以看出,输出电压峰值为200V,频率为50Hz,且THD很小,输出波形稳定。

图8 逆变器输出波形
图9为满载切向半载时输出波形的变化,从图9中可以看出,输出经过轻微扰动后,马上恢复稳定,可见动态性能比较好。
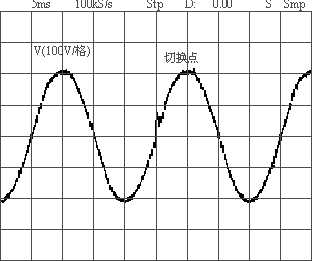
图9 满载切半载时输出电压波形
4 结语
本文提出的逆变器方案,采用电压瞬时值控制,反馈环采用增量式PI控制,并对PI增量和PI输出进行限幅控制,确保了输出的稳定性和精度,同时避免误扰动,有较好的动态性能。控制器采用TI公司的TMS320LF2407A来实现,较好地完成了控制算法。
- 相关推荐
- 逆变器
-
新型逆变器控制策略的设计2009-12-10 0
-
求助!!全桥电压型逆变器的双环PI控制波形畸变的原因2018-04-03 0
-
数字电源输出电压会掉。2021-04-05 0
-
基于虚拟磁链和锁相环的无电网电压传感器并网逆变器的研究2010-02-18 608
-
应急电源正弦逆变器DSP控制的研究2010-07-27 513
-
基于双环控制和重复控制的逆变器研究2009-07-11 1617
-
400Hz逆变器电压环反馈控制设计2009-07-14 3336
-
基于DSP控制的逆变器并联2009-07-14 1880
-
DSP控制SPWM全桥逆变器直流偏磁的研究2009-07-16 2263
-
逆变器双环控制算法仿真研究2011-03-18 1383
-
采用双环控制的四桥臂三相逆变器数字化控制的研究2017-09-14 852
-
改进型PI控制级联单相光伏逆变器2017-11-11 1057
-
PWM逆变器双环控制技术研究2018-05-30 1584
-
基于PI双闭环解耦控制的三相SVPWM电压型逆变器之仿真验证2023-03-03 495
全部0条评论

快来发表一下你的评论吧 !
