CCD的应用(CCD固态图像传感器)?
电荷耦合器件用于固态图像传感器中, 作为摄像或像敏的器件。 ?
2009-08-02 08:59:58 3655
3655 CCD图像传感器应用?
CCD图像传感器在许多领域内获得广泛的应用。 前面介绍的电荷耦合器件(CCD)具有将光
2009-08-02 09:13:374901 
CCD图像传感器在微光电视系统中的应用
摘要:在对CCD图像传感器特性进行分析的基础上,阐述了CCD图像传感器在微光电视系统中的应用,重点讨论
2010-04-24 22:39:242336 
新推出的传感器能够满足两种主要的市场需求:搭载传感器且要求高速运行的设备,其中包括使用单色CCD线性图像传感器的检查设备。
2020-06-12 11:06:531822 CCD图像传感器及其数字相机技术综述了CCD图像传感器的发展趋势、工作原理以及CCD数字照相机技术。关键词: CCD 图像传感器 数字相机
2009-04-28 10:48:22
尽管基于CMOS技术的图像传感器在许多应用中已得到广泛应用,但一些要求严苛的工业成像应用仍需要CCD图像传感器独有的性能。
2019-08-06 08:05:15
百科名片CCDCCD,英文全称:Charge-coupled Device,中文全称:电荷耦合元件。可以称为CCD图像传感器。CCD是一种半导体器件,能够把光学影像转化为数字信号。 CCD上植入
2021-09-09 08:24:49
到CCD转移电极下。 由CCD图像传感器的结构和工作原理决定了这类器件有以下优点: ● CCD是一种固体化器件,体积小、重量轻、可靠性高、寿命长: ● 图像畸变小、尺寸重现性好; ● 具有较高的空间
2018-10-30 17:13:57
CCD及CMOS在从事机器视觉或摄影等行业的朋友来说一点也不陌生,目前虽然在价格上CMOS更有优势并且在技术上的进步也在稳步推进当中,但CCD在一些重点领域中的应用并不见减少。 图像传感器有
2018-11-12 16:17:27
`大家下午好!今天跟大家分享一篇我自己总结的文章:CCD与CMOS哪种更适合工业相机市场?欢迎大家来这里讨论,相互学习!图像传感器是各种工业及监控用相机、便携式录放机、数码相机,扫描仪等的核心部件
2015-09-06 10:58:21
请问有谁知道哪里有卖500万像素以上的CCD或CMOS图像传感器吗?
2014-11-16 21:25:37
目前图像传感器类型有两种:一种是广泛使用的CCD(电荷藕合)图像传感器;另一种是CMOS(互补金属氧化物导体)图像传感器。这两种都是基于核心成像部件CCD和CMOS而区分的CCD中文译为"
2021-07-07 06:19:51
图像传感器的核心是什么?图像传感器有哪些配置?图像传感器有哪些光电二极管元件?如何去校正图像传感器的坏像素?
2021-06-29 07:13:43
CCD、CMOS图像传感器基础与应用CCD图像传感器和CMOS图像传感器,最初主要应用于数字照相机和数字摄像机等,但近几年以惊人的速度广泛应用于手机、个人计算机及PDA等小型装置。 《CCD
2018-05-27 17:26:37
金属氧化物半导体元件(Complementary Metal-Oxide Semiconductor,CMOS)图像传感器和电荷耦合元件(Charge Coupled Device,CCD)摄像器件
2019-10-15 07:25:21
CMOS图像传感器的像素结构目前主要有无源像素图像传感器(Passive Pixel Sensor,PPS)和有源像素图像传感器(Active Pixel Sensor,APS)两种,如图1所示
2018-10-31 17:34:06
CCD所占据的传统领域。 市场的要求 市场对图像传感器有什么要求呢?其实与对其他半导体产品的要求一样,就是多功能集成、低价格,当然还有性能。不过,这三者之间要达成一种平衡,对于集成度和成本的要求
2018-10-29 14:54:06
固体图像传感器(也称固体光电成像器件)有CCD与CMOS两种。CCD是“电荷耦合器件”(Charge Coupled Device)的简称,而CMOS是“互补金属氧化物半导体”(Complementary Metal Oxide Semiconductor)的简称。
2020-04-13 07:13:10
。 其结果是,图像传感器现已被广泛用于手机、笔记本和膝上电脑、数码相机、视频游戏机、玩具、医疗设备、汽车、安全设备、工业设备和许多其它应用。IC Insights公司预测,CMOS和CCD图像传感器在
2018-11-07 16:05:15
金属氧化物半导体元件(Complementary Metal-Oxide Semiconductor,CMOS)图像传感器和电荷耦合元件(Charge Coupled Device,CCD)摄像器件
2019-09-04 07:45:08
,即使使用更大光圈,传感器的显微透镜角度响应性能依然能够提供优异的相片分辨率和清晰度。 图像传感器市场增长点正在从CCD (光电荷耦合器件)转变为基于CMOS的传感器。当前,在数字成像产品领域,由于图片
2018-11-19 17:04:15
若您想提高一个图像传感器的分辨率,您可选两个方法,做大或做小。做“大”可能是最明显及最易理解– 就是增加像素以提高分辨率,但这会增加图像传感器的尺寸。您想提升图像传感器的分辨率一倍﹖那就要增加尺寸一倍。
2019-07-25 06:10:54
摘要:TC237B是美国德州仪器(TI)公司生产的黑白电荷耦合器件(CCD)图像传感器。详细介绍TC237的主要特点,引脚功能和结构原理,最后给出TC237B在嵌入式图像采集系统中的具体应用实例
2018-12-04 13:48:42
TDI(Time Delayed and Integration)CCD(即时间延迟积分CCD)是近几年发展起来的一种新型光电传感器。TDI-CCD是基于对同一目标多次曝光,通过延迟积分的方法
2018-11-15 15:07:01
CMOS图像传感器是一种典型的固体成像传感器,与CCD有着共同的历史渊源。CMOS图像传感器通常由像敏单元阵列、行驱动器、列驱动器、时序控制逻辑、AD转换器、数据总线输出接口、控制接口等几部
2020-06-20 17:00:27
CCD:电荷藕合器件图像传感器CCD(Charge Coupled Device),它使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯片转换成数字信号,数字信号经过压缩以后
2018-11-16 15:53:49
什么是图像传感器技术?图像传感器有哪些类型?基于CCD传感器的系统设计需要考虑哪些因素?
2021-06-17 10:40:50
广大读者对CCD和CMOS能有一个比较初步的认识。CCD和CMOS传感器是目前最常见的数字图像传感器,广泛应用于数码相机、数码摄像机、照相手机和摄像头等产品上。两者在结构、性能和技术上均不尽相同,在此我将
2016-03-30 19:43:46
分析一款不错的基于CPLD的全帧型CCD图像传感器驱动系统设计
2021-04-29 07:09:48
尽管基于CMOS技术的图像传感器在许多应用中已得到广泛应用,但一些要求严苛的工业成像应用仍需要CCD图像传感器独有的性能。
2020-08-10 07:11:24
CCD传感器驱动威廉希尔官方网站
包括哪些?怎样去设计一种CCD传感器驱动威廉希尔官方网站
?
2021-06-08 07:07:50
如何权衡CCD图像传感器的各类优缺点
2021-03-18 06:12:48
纳斯达克上市代号:ONNN)扩充高性能电荷耦合器件(CCD)图像传感器产品阵容,推出针对工业成像应用的最新器件。安森美半导体先进的CCD图像传感器系列新增860万像素先进摄影系统H型(APS-H)光学制式KAI-08670图像传感器,提供最严格应用所要求的关键成像性能。
2020-04-26 09:46:34
金属氧化物半导体元件(Complementary Metal-Oxide Semiconductor,CMOS)图像传感器和电荷耦合元件(Charge Coupled Device,CCD)摄像器件
2019-10-10 07:33:06
金属氧化物半导体元件(Complementary Metal-Oxide Semiconductor,CMOS)图像传感器和电荷耦合元件(Charge Coupled Device,CCD)摄像
2018-11-14 15:48:17
新手求助如何去设计CCD传感器驱动威廉希尔官方网站
?
2021-05-06 08:00:53
目前我需要传感器,在开发病人诊断的设备.是因为找不到合适的传感器才这么询问的.我需要的是48×48(㎛)以上 , 25×25(㎜)以上的CCD图像传感器希望您能帮助我
2019-09-17 11:23:49
松下推出的MN39192FH是一种1.33兆像素1/4 SXGA CCD图像传感器,通过辅助片上滤色镜和光栅实现了速度高,敏感度高等特性。
2021-04-22 06:30:50
CCD(Charge Coupled Device)图像传感器(以下简称CCD)和CMOS图像传感器(CMOS Image Sensor以下简称CIS)的主要区别是由感光单元及读出威廉希尔官方网站
结构不同而
2018-11-15 14:45:01
众所周知,摄像机的核心组成部分有三块:镜头、图像传感器以及压缩处理芯片。其中,图像传感器是图像采集处理部分的核心。而目前,CCD与CMOS传感器是被普遍采用的两种图像传感器,两者都是利用感光二极管
2019-10-11 06:12:04
简单介绍了CCD( 电荷耦合器件) 与CMOS图像传感器的结构, 并对二者的性能特点进行了比较。对他们的现状和发展趋势进行了分析, 说明了CCD图像传感器和CMOS图像传感器之间存在的长期
2009-04-07 10:01:22 39
39 随着微电子技术的发展,CCD图像传感器的产量不断增加.应用领域不断扩展.本文对CCD图像传感器的市场情况进行了分析与预测.对影响CCD传感器市场未来发展具有重要作用的数字照像机
2009-04-25 14:33:4918 CCD图像传感器及其数字相机技术
综述了CCD图像传感器的发展趋势、工作原理以及CCD数字照相机技术。关键词: CCD 图像传感器 数字相机
Abstract: It is summarized for the deve
2009-04-26 11:12:2779 综述了CCD图像传感器的发展趋势、工作原理以及CCD数字照相技术。电荷耦合器件自70年代初诞生以来,已迅速发展成为最常用的固体图像传感器,且广泛应用于科技、教育、医学
2009-07-13 08:53:3720 本文以TCD1501C 型CCD 图像传感器为例.介绍了其性能参数及外围驱动威廉希尔官方网站
的设计.
2009-11-26 15:34:3943 介绍全帧读出型面阵CCD光电传感器的原理及其在图像采集中的驱动和输出威廉希尔官方网站
的设计! 并给出了实际测得的输出信号波形"关键词W 视频面阵 CCD 全帧读出型面阵 CCD 光电传感器
2010-01-27 14:24:0944 基于CPLD 的全帧型CCD 图像传感器驱动系统设计刘凯波 曹剑中 王华伟 崔 巍来源:EDN China摘要: DALSA 公司的FTF4052M 22M Full-Frame 型CCD 是一款全帧型CCD 图像传感器。这里在分
2010-02-05 08:28:3548 对目前的两类图像传感器CCD和CMOS做了系统的分析和研究。对CMOS与CCD的结构特点,相关的性能参数进行了深入比较研究。针对CMOS 图像传感器的低灵敏度、高噪声,暗电流,低填充度
2010-11-22 16:33:0186 松下推出的MN39192FH是一种1.33兆像素1/4 SXGA CCD图像传感器,通过辅助片上滤色
2006-04-16 23:33:211068 CMOS/CCD图像传感器的工作原理
无论是CCD还是CMOS,它们都采用感光元件作为影像捕获的基本手段,CCD/CMOS感光元件的核心都是一个感光二极管(photodiode),该二极管在接受光
2008-01-09 13:03:463911 实验 电荷耦合图像传感器---CCD摄像法测径实验实验目的:通过本实验进一步加深对CCD 器件工作原理和具体应用的认识。实验原理:电荷耦合器件(CCD)
2009-03-06 16:11:232028 什么是电荷藕合器件图像传感器CCD
2009-04-25 17:18:131597
CCD图像传感器驱动威廉希尔官方网站
图
2009-07-07 09:47:121426 
基于CPLD的全帧型CCD图像传感器驱动系统设计
电荷耦合器件((2harge Coupled Devices,CCD)是20世纪70年代初发展起来的新型半导体集成光电器件。作为一种新型的MOS器件,与普
2009-10-25 10:16:08635 
CCD与CMOS图像传感器技术简介
CCD与CMOS传感器是当前被普遍采用的两种图像传感器,两者都是利用感光二极管(photodiode)进行光电转
2009-11-07 11:52:46822 基于μPD795的CCD相机系统中驱动威廉希尔官方网站
的设计
0 引 言
电荷耦合器件(CCD)是一种转换式图像传感器,是以电荷作为信号的MOS型半导体器件。其基
2009-12-01 09:52:441353 
监控用CMOS与CCD图像传感器对比
CCD(Charge Coupled Device)图像传感器(以下简称CCD)和CMOS图像传感器(CMOS Image Sensor以下简称CIS)的主要区别是由感光单元及读出威廉希尔官方网站
结构
2010-01-11 09:18:332254 
CMOS图像传感器,CMOS图像传感器是什么意思
CMOS图像传感器和CCD传感器,工作原理类似。用图4.1.3来说明,CMOS图像传感器并不像CCD那样把
2010-03-02 10:23:182837 CCD图像传感器,CCD图像传感器原理什么?
CCD图像传感器是一种新型半导体器件一电荷祸合器件,是一种MOS集成威廉希尔官方网站
。它作为一种新型的
2010-03-27 10:41:065636 基于线阵CCD的图像和位置传感系统
摘要:本文介绍的是一种基于线阵CCD的图像和位置传感系统。此系统以C18051F020型微控制器作为下位机,进行CCD的驱动和与计算机(上位机)
2010-04-13 14:15:491068 
摘要:随着微电子技术的发展,CCD图像传感器的产量不断增加,应用领域不断扩展。本文对CCD图像传感器的市场情况进行了分析与预测。对影响CCD传感器市场未来
2010-08-19 15:54:592167 
电荷耦合器件(charge coupled device,CCD)是目前摄像机常用的图像传感器。随着CCD技术的不断发展和应用,人们对CCD的性能和数字化提出了更高的要求。对于CCD器件的开发和使用,使得CCD器件的性能
2011-01-20 22:23:532254 
摘 要:概述了CCD图像传感器的原理、特点及发展趋势。对CMOS图像传感器的结构和工作原理,尤其是CMOS与CCD两类图像传感之间的不同进行综述。重点介绍了CMOS图像传感器的研究现状和发展趋势。 关键词:图像传感器;CCD;CMOS;智能CMOS图像传感器
2011-02-01 13:52:4390 概述Foveon X3 CCD图像传感器的工作原理、特性及其在数码相机中的应用。
2011-09-26 16:56:1458 CCD的中文全称是电荷耦合元件,是一种半导体成像器件。通过被摄物体的图像经过镜头聚焦至CCD芯片上的原理制成了CCD摄像机,其中的核心原件就是CCD图像传感器。CCD广泛应用在数码摄影、天文学,尤其是光学遥测技术、光学与频谱望远镜等领域。
2011-11-01 16:31:05

简要介绍了 CCD( 电荷耦合器件) 与 CMOS 图像传感器的结构并对二者的性能特点
进行
了比较 指出二者在未来的发展中不会出现谁消灭谁的结局 。
2016-03-16 14:39:279 电荷藕合器件图像传感器CCD(Charge Coupled Device),它使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯片转换成数字信号,数字信号经过压缩以后由相机
2017-11-05 10:35:465447 ,图像传感器主要分为感光耦合元件(charge-coupled device, CCD)和互补式金属氧化物半导体有源像素传感器(CMOS Active pixel sensor)两种。本文介绍基于CMOS或CCD两种图像传感器的应用及技术文献,供大家参考。
2018-05-25 11:14:002447 CCD传感器于1969年由贝尔实验室研制成功,伴随其高量子效率、高灵敏度、低暗电流、高一致性、低噪音的特性,一度成为图像传感器市场的主导。和CCD传感器相比,CMOS图像传感器具有低功耗、低操作电压、低价格等优势,但是在CMOS图像传感器出现初期由于相对较差的性能和较大的像元尺寸,并没有得到很好的市场
2018-07-18 16:00:009814 尽管基于CMOS技术的图像传感器在许多应用中已得到广泛应用,但一些要求严苛的工业成像应用仍需要CCD图像传感器独有的性能。
2018-09-17 15:19:156229 本文档的主要内容详细介绍的是CMOS图像传感器主要内容包括了:一、 CMOS图像传感器的发展历史二、 CMOS图像传感器的原理 三、 典型CMOS图像传感器四、CMOS图像传感器的性能参数五、CMOS与CCD图像传感器性能比较
2018-11-07 08:00:0056 关键词:CCD , CMOS , 图像传感器 一、引言 70 年代初美国贝尔实验室研制成功第一只电耦合器件( CCD) , 之后CCD技术发展迅速。CCD 图像传感器作为一种新型光电转换器已被广泛
2019-02-24 17:56:011122 CCD图像传感器作为一种新型光电转换器现已被广泛应用于摄像、图像采集、扫描仪以及工业测量等领域。作为摄像器件,与摄像管相比,CCD图像传感器有体积小、重量轻、分辨率高、灵敏度高、动态范围宽、光敏
2019-10-11 15:30:005709 CCD图像传感器除了大规模应用于数码相机外,还广泛应用于摄像机、扫描仪,以及工业领域等。此外,在医学中为诊断疾病或进行显微手术等而对人体内部进行的拍摄中,也大量应用了CCD图像传感器及相关设备。
2019-10-11 15:48:257358 本文介绍了三种CCD(电荷耦合器件)图像传感器体系结构的特点、优点和缺点。任何CCD图像传感器的两个最基本的元素是光敏区域(例如固定光电二极管)和电荷传输结构(即水平和垂直移位寄存器)。
2020-04-04 18:04:0011561 本文介绍了三种CCD(电荷耦合器件)图像传感器体系结构的特点、优点和缺点,涉及全帧(FF)、帧传输(FT)和行间传输(IT)三种CCD的架构。
2020-05-16 09:20:424075 你知道什么是CCD传感器吗?相信你应该使用过手机,照相机等一些照相的工具,其中就有CCD传感器,只是CCD传感器在一些方面的不足在逐渐的被CMOS所淘汰,在以前的照相机内部大多使用的是CCD传感器
2020-05-29 09:19:584226 在实际的应用中,特别是科研领域,经常需要较高分辨率的图像,所以如何利用现有工艺水平下的CCD图像传感器件,获得更高的分辨率就成了一个关键的问题。目前比较有效的一种方法是采用被摄物成的像与CCD图像
2021-04-10 09:28:421784 
Interline CCD 图像传感器的大信号输出优化
2022-11-15 20:36:040 Interline CCD 图像传感器的垂直时序优化
2022-11-15 20:36:340 无论是CCD还是CMOS,它们都采用传感器作为捕捉图像的基本手段,CCD/CMOS传感器的核心是照相二极管(光电二极管),二极管在接受光后可以产生输出电流,同时电流的强度和光的强度。但是在
2023-06-30 11:37:142204 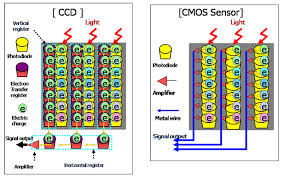
CCD传感器和CMOS传感器是目前最常见的两种数字图像传感器,广泛运用于各类工业相机,个人数码相机,手机相机及摄像机等数字成像产品。本文谈CCD图像传感器和CMOS图像传感器的区别。什么是CCD
2023-10-11 08:08:06762 
来源:工业运动控制技术 编辑:感知芯视界 Link CCD传感器和CMOS传感器是目前最常见的两种数字图像传感器,广泛运用于各类工业相机,个人数码相机,手机相机及摄像机等数字成像产品。本文谈CCD
2023-10-12 11:01:36988
 电子发烧友App
电子发烧友App






































 工商网监
工商网监
评论