

洗碗机水泵无传感器PMSM驱动设计
工控新闻
11人已加入
描述
目前很多洗碗机水泵的驱动部分使用了三相永磁同步电动机(PMSM)。PMSM要求智能驱动系统,其中所包含的微控制器用来解析转子位置并实现控制环路,从而驱动电机旋转。 新型的由微处理器控制的洗碗机在节水节电的同时,能够更加静音。
由于PMSM中没有换向器(即电刷),因此电机控制技术必须基于对转子位置的了解。该位置必须是可测量或可估计的。测量转子位置要求在电机轴上安装光编码器(传感器)等设备,而这样做会大幅增加系统成本。如果可以用一个有效的方法估算转子位置,那么就可以不使用传感器。根据电机运转状态(零速度、低速、高速等)的不同,用来估算转子位置的方法有很多种。电机高速运转时,可以利用观测仪就低角误差、动态性能、错误过滤等方面获得良好结果。本文描述的解决方案使用的是“反电势观测仪”,它基于电机的数学模型。
用来驱动PMSM的高性能技术基于磁场定向控制(FOC),有时简称为“矢量控制”。这种方法的目的,是无论机械负载转矩变化和其他干扰如何,都能够以精确追踪命令轨迹的方式独立控制气隙中的电机转矩和磁链,并实现尽可能快的瞬时响应。FOC方法加上估算转子位置的反电势观测器,是驱动基于 PMSM洗碗机水泵的理想解决方案。
洗碗机水泵
家电制造商最近已经开始使用PMSM来驱动洗碗机水泵,典型参数包括:
– 230V的线路电压(欧洲)
– 6或8个磁极
– 80W额定功率
– 在d、q轴下定子相位等效电感Ld与Lq的关系为-Ld=Lq
洗碗机水泵控制算法在闭合的电流和速度环路中运行。洗碗机内的水压用液压系统(水管、喷水器等)的物理设计来表示,可以通过变换水泵的速度进行控制。
典型的洗碗机水泵运行特性包括103kPa(15psi)至827kPa(120psi)的水压范围和1,500rpm至3,500rpm 的机械泵速度。
PMSM电机控制方法
驱动PMSM的比较适合的控制方法有数个。根据应用性能和成本要求,本节描述的矢量控制方法(也称为FOC)比较适当。FOC控制方法的基本原理如图1中所述。
矢量控制方法的必要信息包括转子的位置和速度,以及电机磁化磁链的位置。传统运动控制系统使用解析器或编码器。这样,监控转子所需的传感器、配线和连接器就增加了系统成本,降低了可靠性。对于成本敏感型应用,必须以其他方式获取转子位置。不采用位置传感器的算法称为“无传感器控制”方法。图2中的框图显示了实施的无传感器矢量控制算法。位置和速度采用反电势观测仪及追踪观测仪进行估算,如图所示。
电机是一个动态系统,因此我们用一组微分方程式对其进行描述。alpha/beta静止参照系中的定子电压方程式可表达如下:
该数学模型描述了该洗碗机水泵应用中使用到的PMSM 的行为,因此它可用于反电势观测仪。
转子位置和速度估算
一般来说,“estimator”是一个估算状态变量的动态系统。estimator实施从根本上说有两种形式:开环和闭环。在闭环estimator情况中,估算值和实际状态变量之间的误差作为校正项,调整响应。闭环estimator也称为观测仪。
反电势观测仪基于对电动势的估算。反电势模型包括来自传统反电势(转子磁铁)的感应电压和来自定子电感的感应电压。这让我们能够通过对反电势的估算来估计转子位置。这种方法在低速时有一定的局限性,因为反电势信号非常弱,几乎为零,而且观测仪发散。当达到有效估算所需的最低运算速度时,反电势观测仪估算转子位置,可将其作为矢量控制算法的反馈信号。正确的观测仪运算的最低运算速度(电压)阈值取决于电机构造,必须根据电机参数计算或直接在电机上进行测试。
观测仪算法处理从PMSM 数学模型中得到以下方程式: )和(
)和( )。这两个信号生成关于转子位置的信息。转换成转子轴角度的转子电气位置,可以由来自扩展反电势估算的两个输入的反正切函数决定。这种方法产生转子角度未过滤值,没有速度信息。
)。这两个信号生成关于转子位置的信息。转换成转子轴角度的转子电气位置,可以由来自扩展反电势估算的两个输入的反正切函数决定。这种方法产生转子角度未过滤值,没有速度信息。
估算转子位置和速度的另外一个广泛使用的方法是众所周知的角度追踪观测仪。通过采用角度追踪观测仪,位置估算的噪音可以被过滤掉。角度追踪观测仪算法的另外一个优势是:作为算法一部分,它还会估算出转子速度。图4描述了角度追踪观测仪的结构。
以反电势观测仪和角度追踪观测仪为基础且带有转子位置和速度估算算法的矢量控制方法,目前已经通过飞思卡尔的MC56F8006得以实现。
有三条控制环路控制速度、转矩、磁链。控制算法在优先的中断服务程序中执行。内部控制环路最为关键(q轴电流和d轴电流),每125μs执行一次。外部控制环路(速度)每1ms执行一次。内部控制环路不可中断,这点可以通过为其分配适当的高中断优先级得以保证。这种方法简化了应用框架设计,允许中断程序优先级由处理器自动管理。矢量控制算法处理以下模拟信号:
– 三个电机相电流(ia、ib、ic)。这些信号通过安装在三个逆变威廉希尔官方网站 底部的三个并联电阻进行测量。
– DC总线电压。
在任何给定实例中,只测量三个相电流中的其中两个,计算第三个。当接通相应的底部晶体管,可以在并联电阻器上看见电流。可以在其中测量电流的窗口依赖生成的PWM控制信号占空比,因此需要在适当且精确的瞬间开始ADC转换流程。借助MC56F8006 DSC中特别设计的硬件,可以圆满完成这一艰巨任务。PWM模块生成的可配置同步脉冲,可以输入到可编程时延块(PDB)中。之后,同步脉冲由PDB模块进行处理,输出直接触发ADC模块,实现对ADC测量的精确同步控制。这种同步机制由硬件进行处理,没有任何软件干预。软件只需要读取ADC结果寄存器。这里描述的应用使用这一功能,每125μs转换6个模拟信号。ADC模块包含两个独立的12位ADC转换器,在经过配置后可以依次、同时或并行运行。要进行相位电流取样,使用同时运行模式同时在两个相位上进行ADC测量。这样就实现了精确的瞬时测量,三个相位电流都可以从该测量中提取。
由于反电势观测仪不从零速度开始运行,转子通过驱动电机达到已知状态(相位)进行校准,这样我们就了解了初始转子位置。然后使用开环启动算法,将电机加速到反电势观测仪能够提供精确反馈结果的速度。从开环启动到闭环控制的切换平稳进行。
洗碗机水泵解决方案的运行图如图5所示,基于飞思卡尔MC56F8006的逆变器如图6所示。
打开APP阅读更多精彩内容
由于PMSM中没有换向器(即电刷),因此电机控制技术必须基于对转子位置的了解。该位置必须是可测量或可估计的。测量转子位置要求在电机轴上安装光编码器(传感器)等设备,而这样做会大幅增加系统成本。如果可以用一个有效的方法估算转子位置,那么就可以不使用传感器。根据电机运转状态(零速度、低速、高速等)的不同,用来估算转子位置的方法有很多种。电机高速运转时,可以利用观测仪就低角误差、动态性能、错误过滤等方面获得良好结果。本文描述的解决方案使用的是“反电势观测仪”,它基于电机的数学模型。
用来驱动PMSM的高性能技术基于磁场定向控制(FOC),有时简称为“矢量控制”。这种方法的目的,是无论机械负载转矩变化和其他干扰如何,都能够以精确追踪命令轨迹的方式独立控制气隙中的电机转矩和磁链,并实现尽可能快的瞬时响应。FOC方法加上估算转子位置的反电势观测器,是驱动基于 PMSM洗碗机水泵的理想解决方案。
洗碗机水泵
家电制造商最近已经开始使用PMSM来驱动洗碗机水泵,典型参数包括:
– 230V的线路电压(欧洲)
– 6或8个磁极
– 80W额定功率
– 在d、q轴下定子相位等效电感Ld与Lq的关系为-Ld=Lq
洗碗机水泵控制算法在闭合的电流和速度环路中运行。洗碗机内的水压用液压系统(水管、喷水器等)的物理设计来表示,可以通过变换水泵的速度进行控制。
典型的洗碗机水泵运行特性包括103kPa(15psi)至827kPa(120psi)的水压范围和1,500rpm至3,500rpm 的机械泵速度。
PMSM电机控制方法
驱动PMSM的比较适合的控制方法有数个。根据应用性能和成本要求,本节描述的矢量控制方法(也称为FOC)比较适当。FOC控制方法的基本原理如图1中所述。

图1:FOC控制方法原理
矢量控制方法的必要信息包括转子的位置和速度,以及电机磁化磁链的位置。传统运动控制系统使用解析器或编码器。这样,监控转子所需的传感器、配线和连接器就增加了系统成本,降低了可靠性。对于成本敏感型应用,必须以其他方式获取转子位置。不采用位置传感器的算法称为“无传感器控制”方法。图2中的框图显示了实施的无传感器矢量控制算法。位置和速度采用反电势观测仪及追踪观测仪进行估算,如图所示。

图2:PMSM矢量控制算法框图
电机是一个动态系统,因此我们用一组微分方程式对其进行描述。alpha/beta静止参照系中的定子电压方程式可表达如下:



该数学模型描述了该洗碗机水泵应用中使用到的PMSM 的行为,因此它可用于反电势观测仪。
转子位置和速度估算
一般来说,“estimator”是一个估算状态变量的动态系统。estimator实施从根本上说有两种形式:开环和闭环。在闭环estimator情况中,估算值和实际状态变量之间的误差作为校正项,调整响应。闭环estimator也称为观测仪。
反电势观测仪基于对电动势的估算。反电势模型包括来自传统反电势(转子磁铁)的感应电压和来自定子电感的感应电压。这让我们能够通过对反电势的估算来估计转子位置。这种方法在低速时有一定的局限性,因为反电势信号非常弱,几乎为零,而且观测仪发散。当达到有效估算所需的最低运算速度时,反电势观测仪估算转子位置,可将其作为矢量控制算法的反馈信号。正确的观测仪运算的最低运算速度(电压)阈值取决于电机构造,必须根据电机参数计算或直接在电机上进行测试。
观测仪算法处理从PMSM 数学模型中得到以下方程式:



图3:反电势观测仪框图
)和()。这两个信号生成关于转子位置的信息。转换成转子轴角度的转子电气位置,可以由来自扩展反电势估算的两个输入的反正切函数决定。这种方法产生转子角度未过滤值,没有速度信息。 估算转子位置和速度的另外一个广泛使用的方法是众所周知的角度追踪观测仪。通过采用角度追踪观测仪,位置估算的噪音可以被过滤掉。角度追踪观测仪算法的另外一个优势是:作为算法一部分,它还会估算出转子速度。图4描述了角度追踪观测仪的结构。
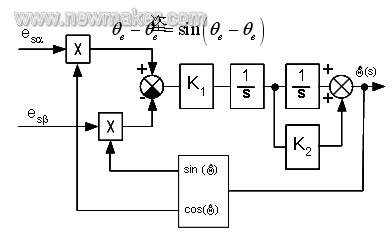
图4:角度追踪观测仪框图
以反电势观测仪和角度追踪观测仪为基础且带有转子位置和速度估算算法的矢量控制方法,目前已经通过飞思卡尔的MC56F8006得以实现。
有三条控制环路控制速度、转矩、磁链。控制算法在优先的中断服务程序中执行。内部控制环路最为关键(q轴电流和d轴电流),每125μs执行一次。外部控制环路(速度)每1ms执行一次。内部控制环路不可中断,这点可以通过为其分配适当的高中断优先级得以保证。这种方法简化了应用框架设计,允许中断程序优先级由处理器自动管理。矢量控制算法处理以下模拟信号:
– 三个电机相电流(ia、ib、ic)。这些信号通过安装在三个逆变威廉希尔官方网站 底部的三个并联电阻进行测量。
– DC总线电压。
在任何给定实例中,只测量三个相电流中的其中两个,计算第三个。当接通相应的底部晶体管,可以在并联电阻器上看见电流。可以在其中测量电流的窗口依赖生成的PWM控制信号占空比,因此需要在适当且精确的瞬间开始ADC转换流程。借助MC56F8006 DSC中特别设计的硬件,可以圆满完成这一艰巨任务。PWM模块生成的可配置同步脉冲,可以输入到可编程时延块(PDB)中。之后,同步脉冲由PDB模块进行处理,输出直接触发ADC模块,实现对ADC测量的精确同步控制。这种同步机制由硬件进行处理,没有任何软件干预。软件只需要读取ADC结果寄存器。这里描述的应用使用这一功能,每125μs转换6个模拟信号。ADC模块包含两个独立的12位ADC转换器,在经过配置后可以依次、同时或并行运行。要进行相位电流取样,使用同时运行模式同时在两个相位上进行ADC测量。这样就实现了精确的瞬时测量,三个相位电流都可以从该测量中提取。
由于反电势观测仪不从零速度开始运行,转子通过驱动电机达到已知状态(相位)进行校准,这样我们就了解了初始转子位置。然后使用开环启动算法,将电机加速到反电势观测仪能够提供精确反馈结果的速度。从开环启动到闭环控制的切换平稳进行。
洗碗机水泵解决方案的运行图如图5所示,基于飞思卡尔MC56F8006的逆变器如图6所示。
图5:运行洗碗机泵演示
图6:采用飞思卡尔MC56F8006器件的三相逆变器
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
求助,基于PLC的洗碗机控制。。2013-06-28 0
-
霍尔元件 SS2309 在洗碗机中的应用案例2020-02-27 0
-
PMSM有霍尔传感器与PMSM无霍尔传感器的程序有何区别2021-08-06 0
-
怎样去设计一个基于单片机的洗碗机控制器2021-11-19 0
-
开源硬件-TIDA-00447-针对洗碗机水泵的 24V 双通道直流无刷电机驱动器 PCB layout 设计2009-01-09 1158
-
洗碗机好用吗?洗碗机的效果比手动洗碗更高效2018-09-19 1193
-
怎样选购洗碗机2018-12-24 3398
-
如何实现无传感器初始位置检测2019-01-09 9250
-
洗碗机哪个牌子好?最新洗碗机十大排名让你放心选!2019-08-13 8262
-
基于单片机的洗碗机控制器2021-11-12 506
-
Candy CDCP 6洗碗机被首推,国外科技媒体评价Candy洗碗机2022-02-22 1392
-
传感器在洗碗机中的应用方案2022-07-12 3283
-
欧姆龙传感器:B5W传感器在商用洗碗机上的应用2022-12-30 415
-
洗碗机洗不干净?Standex干簧传感器来助力!2021-06-21 1059
-
洗碗机原理图2023-10-09 405
全部0条评论

快来发表一下你的评论吧 !
