

基于速度追踪原理实现目标模拟训练系统的设计
描述
军队靶场训练基地用于跟踪高速运动目标的主要手段是光电跟瞄设备。对于光电跟瞄系统而言,操作训练需要外部目标环境的紧密配合,因此,训练所需的目标环境构建成为对操作手训练和对光电跟瞄设备仿真检测的关键因素之一。如果通过现场飞行试验来构造目标环境,则训练成本过大,还受到天气等环境因素的影响。因此,如何低成本而又高效率地完成操作训练是目前困扰相关军事单位的一个难题。
目前,在靶场训练的项目中,通过研制目标模拟器来构造目标环境,并采用虚拟场景注入的方法来实现。该方法通过事先录制好一段目标场景的图像,操作手根据观看播放的录像,操纵光电跟瞄设备对录像中的目标进行跟踪捕获训练。但此方法没有反馈,而且实时性较差。本文提出一种新的虚拟图像注入方法。该方法实时获得跟踪设备及目标的运行参数,根据速度追踪原理模拟生成目标及背景的图像数据,从而达到跟踪训练的目的。该方法实现简单方便、可操作性强,更加注重操作手对光电跟瞄设备操纵的性能。
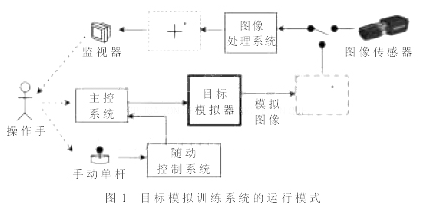
1 目标模拟训练系统的运行模式
在工作过程中,首先由操作手根据训练需要设定目标模拟的速度、机动特性等初始参数并送到主控系统;按照设定的目标运行特点在每帧待输出图像上设定、调整目标位置;目标模拟器通过主控计算机接收编码器位置信息,并解算设备运行速度,根据速度追踪原理输出实时跟踪的图像数据;将图像处理系统转换到接收目标模拟器输出图像信息的模式;图像处理器将叠加十字丝的视频图像传送给操作手的监视器;操作手操作单杆控制伺服系统运转,使回转平台运转对目标进行模拟捕获;最后,图像处理器根据编码器返回数据实时调整目标位置,完成对目标捕获过程的模拟训练。系统运行模式如图1所示。
2 数学建模
目标模拟器的数学模型基于速度追踪原理:假设目标按照特定速度与设备视轴做等速运动,该速度在单帧合成图片中体现为位置脱靶量,如图2所示。
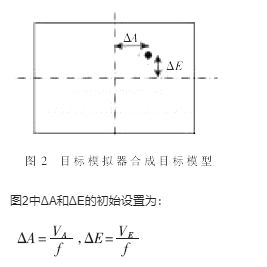
当操作手开始进行手动跟踪时,目标仿真图像的调整数学模型为:
3 硬件设计
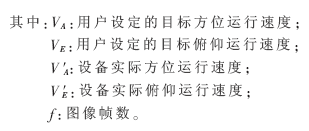
目标模拟器由串口转换模块、DSP模块、FPGA模块、Camera Link接口模块组成,结构如图3所示。
DSP采用TI公司的TMS320F2812芯片,它是目前用于控制领域的最高性能的处理器,具有控制精度高、速度快、使用灵活以及集成度高等优点,运行速率可达150 MIPS,指令采用流水线处理,使得数据处理的能力大大增强。设计中主要利用其串行通信(SCI)接口、外部中断(XINTx)接口和外部扩展(XINTF)接口。通过与主控计算机进行通信,接收模拟目标和跟踪设备的参数,并根据建立的数学模型解算出目标及设备的坐标,实时生成目标及背景的图像数据,同时接收时统的同步中断信号。
设计中选用MAXIM公司的MAX3070芯片进行RS-422到RS-232协议的转换,利用DSP2812的SCI模块实现与主控计算机的通信。把MAX3070的DI脚与DSP2812的SCITXD相连,RO与DSP2812的SCIRXD相连,同时为了保证顺利地与主控计算机通信,允许接收RE#脚直接接地,允许发送DI脚直接接VCC。加上两个电阻以及去耦电容实现了串行通信接口的硬件设计。DSP2812通过外部扩展接口(XINTF)与FPGA进行数据传递,将XWE#引脚作为写使能信号与FPGA的I/O脚相连,将XCLKOUT引脚作为写时钟信号与FPGA的I/O脚相连,将16位数据线与FPGA的I/O脚相连,来传送图像数据信号。
FPGA以ALTERA公司的Cyclone II系列的EP2C8-Q208C8芯片作为目标模拟器的时序和逻辑控制核心。EP2C8Q208C8具有8 256个的逻辑单元(LE)、165 888 bit基于流行的M4K嵌入式存储器块,可以配置为广泛的操作模式,包括ROM、单端口和双端口RAM等。设计中用芯片内部的双端口RAM构造异步FIFO控制图像数据的时序,加上帧同步(FVAL)和行同步(LVAL)信号一起按照红外图像的设计时序要求将图像数据发送到Camera Link接口模块。
Camera Link接口采用DS90CR287作为驱动芯片,是专用的电平转换器件,能将28位CMOS/TTL电平数据和1位像素时钟信号分别转换成4组LVDS数据流及一对LVDS时钟信号进行传输。由于采用差分传输方式,提高了传输距离及信号精度。使用标准的MDR26作为Camera Link接口与图像采集卡之间的连接接口。
4 软件设计
目标模拟器的软件设计主要由DSP程序和FPGA程序组成。
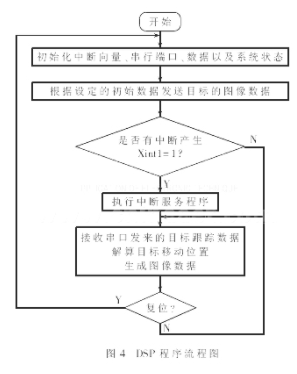
DSP程序流程图如图4所示。由于生成图像数据要通过DSP芯片的外部接口XINTF发送,DSP2812有5个固定的存储映像区域,设计中采用ZONE2区作为映像区域,所以首先要解决数据存储映像的问题。本设计采用CCS提供的下面两个指令实现数据映像。
#pragma CODE_SECTION 针对程序空间;
#pragma DATA_SECTION 针对数据空间;
具体程序实现如下:
#pragma DATA_SECTION(pRGB,″My_Sect″)
struct
{ Uint16 r;
Uint16 w;
}pRGB[320][240];
在.cmd文件中建立对应的section就可以使用了。
MEMORY
{PAGE1: ZONE2 :origin=0x080000,length=0x080000 }
SECTIONS
{My_Sect :》ZONE2, PAGE=1 }
建立映像后要设置XINTF的相应寄存器值,对于外部接口的访问主要分为3个阶段:(1)建立阶段:被访问区的片选信号变为低电平,地址被放置在地址总线上;(2)激活阶段:对外部器件进行访问。本设计主要是写访问,写使能(XWE#)选通变低并将数据放置在数据总线上(XD);(3)跟踪阶段:跟踪阶段为一保持时间,其片选信号为低,而后读和写选通变为高[1]。
具体设置如下:
XintfRegs.XTIMING2.bit.XWRLEAD=1
XintfRegs.XTIMING2.bit.XWRACTIVE=1
XintfRegs.XTIMING2.bit.XWRTRAIL=1
建立、激活、跟踪分别为1个时钟周期。
DSP2812的串行通信(SCI)模块使用16位的波特率选择寄存器(SCIHBAUD和SCILBAUD)设置SCI的波特率,因此SCI可以采用64 K种不同的波特率进行通信,通过下面的公式计算出写入寄存器的值:
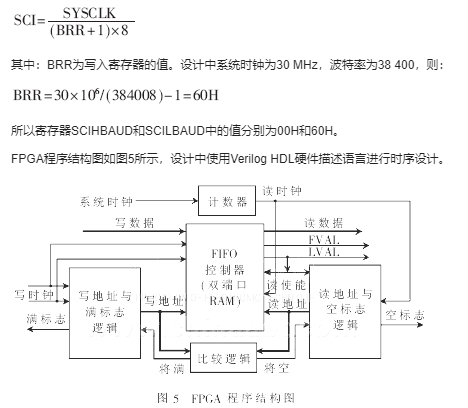
从图5可以看出,采用模块化的设计方法,图像数据的写操作和读操作分别工作在两个不同的时钟域内,数据的写入是连续的,数据的读出是按照一定的帧频和行频进行的。本设计采用双端口RAM构造异步FIFO的方法来实现。一方面要解决异步FIFO设计中存在的难点;另一方面要与Camera Link接口进行视频数据的同步控制,生成场同步信号FAVAL和行同步信号LVAL。
整个程序可分为6个模块。其中FIFO控制器模块中包含一个双端口RAM,用来存储数据及控制读写操作;写地址与满标志逻辑生成写地址并产生满标志,写地址和写使能由DSP提供;读地址与空标志逻辑生成读地址并产生空标志,读时钟由系统时钟通过计数分频得到。因为读操作要在LVAL信号的控制下完成,所以读使能信号使用LVAL,其中空、满状态通过增加标志位和划分地址空间来产生;比较逻辑用来异步比较读、写地址,并产生将满、将空信号,其中读、写地址用格雷码指针表示。该设计很好地解决了异步FIFO设计中存在的两个关键问题,即降低了威廉希尔官方网站 中亚稳态的出现概率,正确产生了空、满状态逻辑。FVAL和LVAL的计算方法如下所述。
设计中像素时钟信号PIXCLK的频率为10 MHz。模拟的图像数据的像素为320×240,帧频为50 Hz,即每秒传输50帧图像。行同步信号LVAL和帧同步信号FVAL均由像素时钟信号进行计数产生,其时序如图6所示。
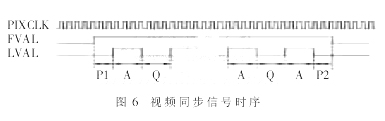
图6中,P1为35个PIXCLK时钟周期;A为320个PIXCLK;即一行包含320个像素点;Q为47个PIXCLK;P2为13个PIXCLK,帧同步信号FVAL为低电平的时间是111 872个PIXCLK。一帧图像包含240行有效数据,可计算出传输一帧图像信号的时间为240×(A+Q)+P1+P2+111 872=200 000个PIXCLK时钟周期,帧频为10 MHz÷200 000=50 Hz。
5 实验结果
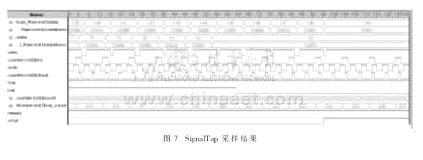
将DSP程序和FPGA程序下载到实验板中,使用开发工具Quartus II6.0中自带的逻辑分析仪SignalTap对试验中的主要信号进行采样监测,采样结果如图7所示。其中data为写入数据,wraddress为写地址,rdata为读出数据,raddress为读地址。当行有效信号lval为低时读操作停止,当写满信号为高时数据停止写入。结果表明信号时序准确,数据和地址没有毛刺现象。最后将实验板连接到图像采集卡,模拟的图像像素是320×240,频率是50 Hz,通过观看采集卡采集的图像,表明图像时序稳定,能够达到设计要求。
设计中采用新的虚拟图像注入方法的目标模拟器为训练系统提供目标的图像数据,该方法实现简单。基于Camera Link接口协议的图像信号采用LVDS方式传输,增加了传输距离,提高了传输过程中的信号精度。经过试验测定图像数据信号稳定、可靠,各项指标与目前光电跟瞄设备采用的红外热像仪输出图像格式吻合,实时性满足要求,能够很好地完成操作手对光电跟瞄设备的跟踪训练和日常维护的任务。
责任编辑:gt
-
基于智能语音交互芯片的模拟训练器示教与回放系统设计2019-07-01 0
-
简述电子对抗综合模拟训练平台2021-09-01 0
-
某型导弹模拟训练器发控系统设计2009-08-14 630
-
仿实装的多功能模拟训练系统设计2009-08-14 605
-
虚拟坦克模拟训练系统设计与研究2009-09-01 647
-
消防模拟训练环境控制系统硬件威廉希尔官方网站 设计2010-01-25 434
-
EPM7128S在雷达电子干扰模拟训练器中的应用2009-05-15 1432
-
某型航空侦察平台模拟训练系统的研制2011-10-24 1041
-
Flash实现雷达模拟训练软件2012-02-08 775
-
软件复用技术在雷达模拟训练中的应用2012-02-09 1018
-
空管模拟训练中指令的语音识别与合成技术研究2013-04-16 1080
-
某大型机电设备模拟训练系统总体设计2013-07-25 1400
-
基于STM32F407和MAX7349的超短波电台模拟训练系统设计与实现2018-01-31 3309
-
中国航天第十一研究院研发无人机模拟训练系统2018-11-26 5327
-
无人机飞行仿真模拟训练系统2024-09-10 604
全部0条评论

快来发表一下你的评论吧 !
