

基于UGN3503霍尔器件的数字指南针设计案例
电子说
描述
本文介绍了用两个UGN3503型霍尔器件设计制作的数字指南针的设计目的、系统结构和工作原理,以及各主要器件的使用方法。本系统包括UGN3503型霍尔器件、TLC0832 A/D转换器、单片机控制、液晶显示四部分,实现了对地磁信息的采集、放大,经过模数转换和单片机处理,最终显示出用文字表示的当前所处方位。
现在机器人的控制有了很大的发展,尤其遥控机器人,但是还不能象人有自己的探索。基本上是放上摄像头人工控制,所以很大程度上没有独立工作能力,离开人和GPS还是不能工作。我们开发本系统是为了在一个恶劣的环境下为一个数字化系统提供一个原始的参考数据,或充当机器人的一个廉价的测控工具。
本着这个目的,本系统主要功能有:
1、地磁放大功能:通过内置磁铁对地磁场的反应,实现对地磁信息的放大。
2、系统辅助定位功能:通过本设备提供的串行口,既可以嵌入系统,为系统的空间定位提供参考数据;又可以作为外设,提供临时性测算。
本系统的输出方式可以采用液晶显示和语音输出两种方式,语音输出可为盲人提供方便。
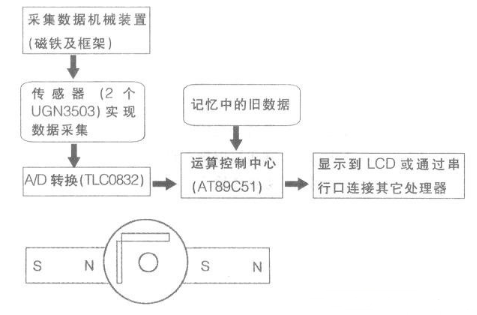
整个系统的方框图如上图所示。
我们将互相垂直的两个霍尔器件固定于框架底部(如下图所示),在两个小磁铁条的N极和S极之间夹一个中空的塑料圆筒使其刚好将两霍尔器件套入而没有接触。圆筒顶部封口,从其顶部圆心处引一根塑料轴,固定于框架底部,使圆筒可绕中心轴自由转动。
通过这种方法,小磁条便可在地球磁场的作用下指示方向,由于此两磁铁之间的磁场强度比地球磁场强很多,因此霍尔器件能够探测到其周围磁场的变化,从而实现了对地磁信号的放大。
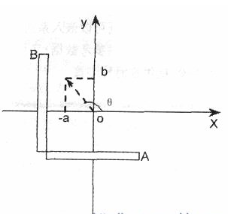
如图所示霍尔器件A探测x方向的磁场,B探测y方向的磁场。设某一时刻磁场方向如右图所示,A、B探测到的磁场分别为-a和b。则单片机通过处理此二数据便可得到方位角θ的值,从而判定当前方位。右图中虚线箭头所指方向为磁场方向,即地磁南极方向,×轴正方向即为观察者面对的方向。
目前市面上有多种霍尔器件,但大多数灵敏度较低,考虑到地磁的磁感应强度较为微弱,我们慎重选用了UGN3503型霍尔器件。此霍尔器件灵敏度较高,而且低噪输出。由于此器件采集到的信息是连续变化的模拟量,不能被单片机直接处理,必须把这些模拟量转换成数字量后才能够输入到单片机中进行处理,因此我们选用了A/D转换器TLC 0832。TLC0832是串行通讯的8脚2路A/D转换器件,在功能上和体积上都有优势。我们还可以把51改成2051进一步缩小体积。而且串行通讯可以把它跟3503做到一起,这样数据传输不受距离限制。此转换器与处理器接口兼容性较好,同时又可以单机操作。在5V电压供应下,可以输入0~5V范围内电压。TLC0831有单一输入频道;TLC0832已经具有多重输入频道。连续的输出被配置到接口标准变化寄存器或微处理器。LCD液晶显示采用LCD1602。此液晶显示模块为2行输出,每行16个字符。
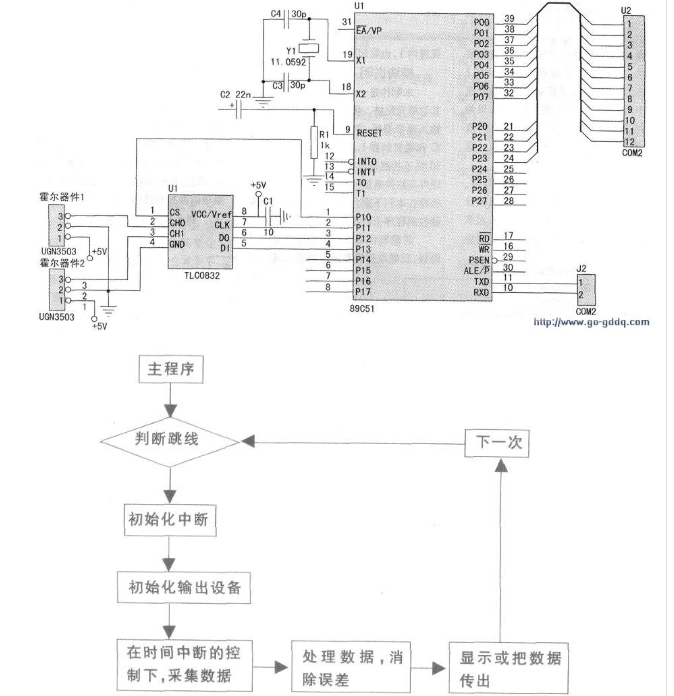
整个系统威廉希尔官方网站 图如上图所示。
考虑到在实际应用时,磁场可能会由于外界抖动而在某一时间或某一位置产生不稳定的状况,我们在数据处理时,采取了在若干个数据间段点中取其平缓过渡数据的设计方法。单片机最后通过跳线选择处理结果输出方式。系统程序流程图如下图所示。
目前,大多数设备还不具备简单的方向识别功能。对于较复杂、较高档的设备,其所用定位设备专用性较强,一般不易于其它设备兼容,且设计结构较为复杂,费用较高。我们设计的小型方向定位器,可以满足一些小型的,对方向精度要求不高的设备需要。由于该设备开发成本较低,因此把该仪器应用于一些简单设备中后,可以在较小提高成本的条件下,为设备增加一项较为显着的功能,提高其性价比。
编辑:hfy
-
电子指南针解决方案2008-07-20 0
-
UGN3503霍尔传感器2015-04-26 0
-
指南针!!!2016-04-12 0
-
基于单片机电子指南针系统的设计资料分享2021-11-11 0
-
基于OpenHarmony的智能指南针2022-07-08 0
-
UGN3503 pdf datasheet/a3503 p2008-07-24 974
-
电子指南针2009-01-01 620
-
电子指南针原理2008-07-20 9709
-
用指南针巧作磁化检验器2009-09-05 734
-
会说话的指南针威廉希尔官方网站2012-01-04 4197
-
labview与指南针芯片通讯2016-02-23 1050
-
iPhone自带的指南针的妙用2018-05-22 7713
-
为什么电子指南针能指示方向2022-07-25 1903
全部0条评论

快来发表一下你的评论吧 !
