 FANUC机器人TCP三点法
FANUC机器人TCP三点法
三点法设置方法
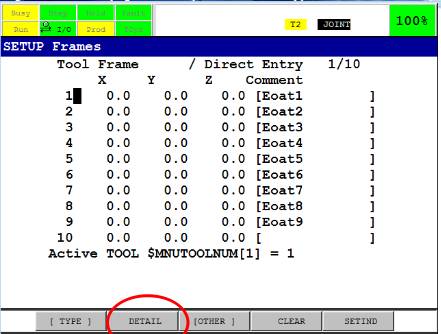
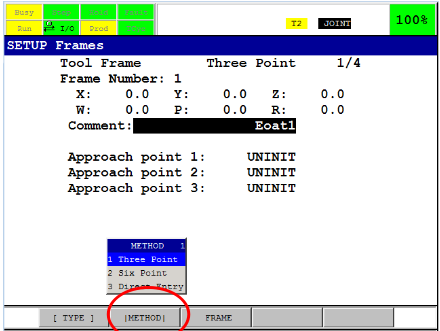
DETAIL–METHOD–回车进入三点法界面:
三点法操作步骤:
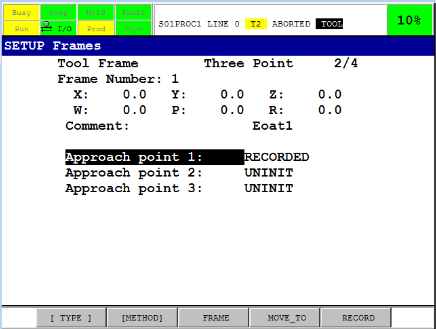
记录接近点1
a.移动光标到接近点1(Approachpoint1);
b.把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具尖端接触到基准点;
c.按【SHIFT】+F5【RECORD】(位置记录)记录
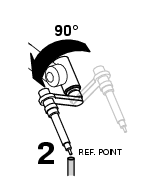
记录接近点2
a.移动光标到接近点2(Approachpoint2);
b.把示教坐标切换成关节坐标(JOINT),旋转J6轴(法兰面)至少90度,不要超过360度;
c.把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具尖端接触到基准点;
d.按【SHIFT】+F5【RECORD】(位置记录)记录;
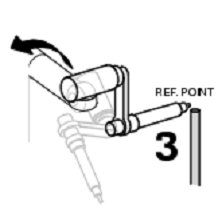
记录接近点3
a.移动光标到接近点3(Approachpoint3);
b.把示教坐标切换成关节坐标(JOINT),旋转J4轴和J5轴,不要超过90度;
c.把示教坐标切换成全局坐标(WORLD)后移动机器人,工具尖端接触到基准点;
d.按【SHIFT】+F5【RECORD】(位置记录)记录;
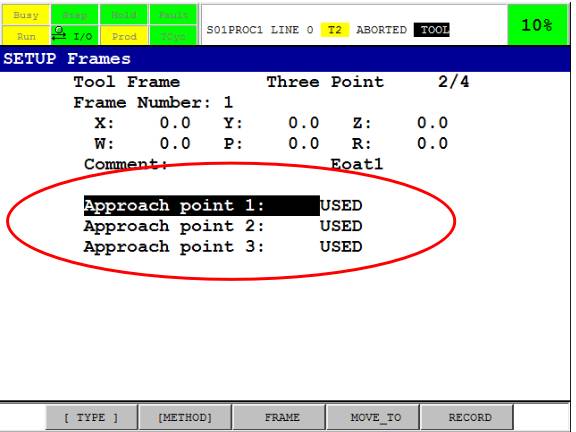
当三个点记录完成,新的工具坐标系被自动计算生成.Point1-3显示成USED,如下图所示:
责任编辑:xj
原文标题:FANUC机器人TCP三点法详解,你用过吗?
文章出处:【微信公众号:工业机器人】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28466浏览量
207330 -
TCP
+关注
关注
8文章
1362浏览量
79111 -
Fanuc
+关注
关注
18文章
117浏览量
36664
原文标题:FANUC机器人TCP三点法详解,你用过吗?
文章出处:【微信号:indRobot,微信公众号:工业机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
取特征点,涉及大量像素级比较运算;优化机器人位姿,需要迭代求解大规模矩阵方程。书中提出了模块化的硬件加速方案,阐述了如何以因子图为通用模版,以求解非线性优化问题为桥梁,面向多种机器人应用进行加速。
第11
发表于 01-04 01:15
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
近年来,人工智能领域的大模型技术在多个方向上取得了突破性的进展,特别是在机器人控制领域展现出了巨大的潜力。在“具身智能机器人大模型”部分,作者研究并探讨了大模型如何提升机器人的能力,大模型存在
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
的研发工作奠定了基础。继之而来,北京理工大学在2002年发布的“汇童”系列机器人,实现了无外接电缆的行走。
三、问题与挑战
具身智能虽然取得了一定的进展,但是也面临着诸多的问题与挑战,主要有如下几个方面
发表于 12-28 21:12
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
要给AI这个聪明的“头脑”装上一副“身体”。这个“身体”可以是一部手机,可以是一台自动驾驶汽车。而人形机器人则是集各类核心尖端技术于一体的载体,是具身智能的代表产品。与传统的软件智能体不同,具身智能
发表于 12-19 22:26
怎么判断电容三点式和电感三点式
在电子威廉希尔官方网站
中,电容三点式和电感三点式振荡威廉希尔官方网站
是两种常见的振荡威廉希尔官方网站
类型,它们的主要区别在于反馈元件(电容或电感)与晶体管三个极(基极、发射极、集电极)的连接方式。 一、基本概念 1. 电容三点
电容三点式和电感三点式振荡器的原理、特点及设计方法
电容三点式和电感三点式是电子威廉希尔官方网站
中常见的两种振荡器结构,它们在无线通信、信号发生器等领域有着广泛的应用。 电容三点式振荡器 1.1 原理 电容三点式振荡器是一种利用电容和电感元件构成的
电容三点式与电感三点式振荡器相比哪个好
电容三点式与电感三点式振荡器各有优势,具体哪个更好要根据实际的应用场景和需求来决定。电容三点式与电感三点式振荡器是两种常见的振荡器结构,它们在无线电通信、电子测量等领域有着广泛的应用。
abb机器人工具坐标系问题
各位大佬请教一下,abb机器人工具坐标系用四点法,六点法,手动输入等方式标定出的工具坐标系的Z方向与实际工具的长度不符,实际工具长度越长坐标系z方向的差距越大。比如实际工具400mm坐标系标定的Z方向是300mm,这种是什么情况
发表于 08-07 11:11
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
工业机器人仿真软件有哪些
功能强大的机器人仿真和离线编程软件,支持多种机器人品牌,如Fanuc、KUKA、ABB等。它提供了丰富的工具,如3D可视化、碰撞检测、路径优化等。 CoppeliaSim (前称V-REP) :CoppeliaSim 是一款开源
abb机器人home点设置方法
ABB机器人的home点设置是机器人编程和操作中非常重要的一环,它关系到机器人的精度和稳定性。本文将详细介绍ABB机器人home
西门子PLC与FANUC机器人如何实现EtherNet/IP通信
示例配置要求:
输入/输入 64 字节,通讯 RPI 设置 30ms
西门子 PLC 作为扫描器,IP 地址设置为 192.168.0.2
FANUC 机器人作为适配器,IP 地址分别设置为 192.168.0.55 和 192.168.0.56
发表于 03-12 11:04
•5707次阅读






 工商网监
工商网监
评论