

使用开源硬件的烹饪过程
电子说
描述
以下示意图项目提出了一种使用传感器系统和电机控制自动化烹饪过程的方法,以产生完美的arrosticini。
Arrosticini——羊肉或羊肉串——是意大利阿布鲁佐地区美食的主食。一种典型的田园传统菜肴,据说是在上个世纪初由饥饿的牧羊人在他们的羊群季节性迁移到新鲜牧场期间被困在田野中发明的。牧羊人会宰杀一只老羊,把肉切成小块,把小块滑到棍子上,然后在火焰上烤肉串。
将arrosticino烹饪至完美需要仔细控制烹饪温度和烹饪时间以及均匀的热量分布。传统的方法是在 fornacella 炭烤架上烤串。根据纯粹主义者的说法,电炊具损害了arrosticino的传统风味(以及厨师的自尊心)。然而,以传统方式烤制arrosticini 是一个劳动密集型、严格的过程。是否可以使用电动装置实现完美烧烤?
下面的示意图项目提出了一种通过传感器系统和电机控制实现过程自动化的方法,以产生完美的arrosticini。反馈系统的简单性允许实施任何解决方案。使用的组件包括温度传感器、用于查看温度的显示器和电机控制解决方案。
简介
烤肉时首先要考虑的是使内部温度达到所需温度,同时保持恒定的烹饪过程。假设你有一个盘子,上面堆满了初始温度为T o的肉。在烹饪开始时,肉的表面与温度为T g的烤架表面接触。对于这个简单的条件,肉在任何时间t和任何深度z的温度都可以通过以下公式建模:
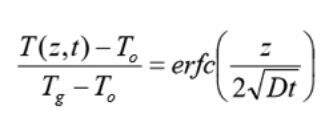
其中D是肉的热扩散率(或热扩散系数),erfc是互补误差函数(其近似值可在特殊表格中找到)。
在数学中,误差函数(也称为高斯误差函数)是概率、统计和偏导微分方程中遇到的特定函数。它被定义为:
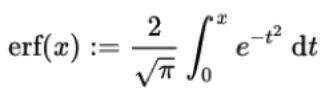
并且对每个实数x有效。erfc表中的值可以通过开发泰勒级数误差函数并对整个实轴进行积分来获得。
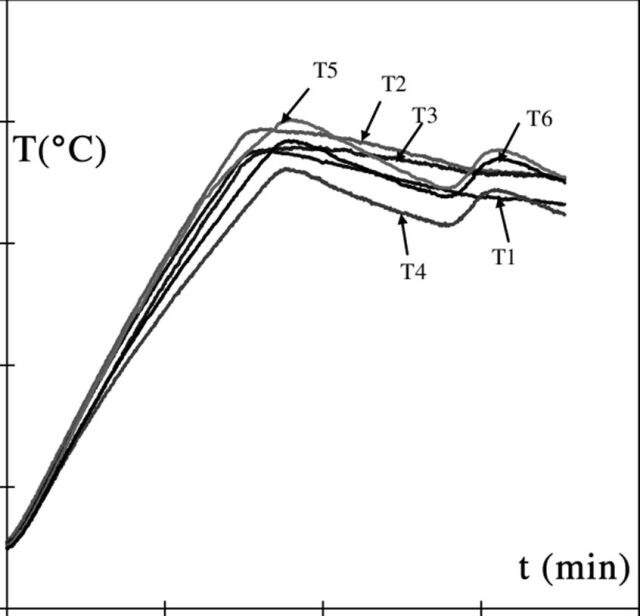
图 1:不同传感器的温度随时间变化。温度从初始值开始,然后达到最大值并保持在一定的公差范围内。1
目的是通过控制温度来制备煤,使其在时间上保持恒定。我们应该得到的分布是图 1所示的类型。
热扩散率(测量单位:mm 2 /s)是表征非平稳热传导的材料的特定属性。这个量描述了材料对温度变化的反应速度。热扩散率是求解非平稳传热傅里叶方程的先决条件。
可以求解模型方程以确定肉达到所需温度T(z,t)所需的时间:
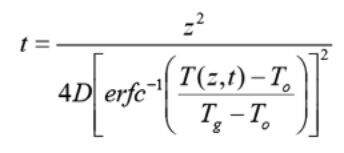
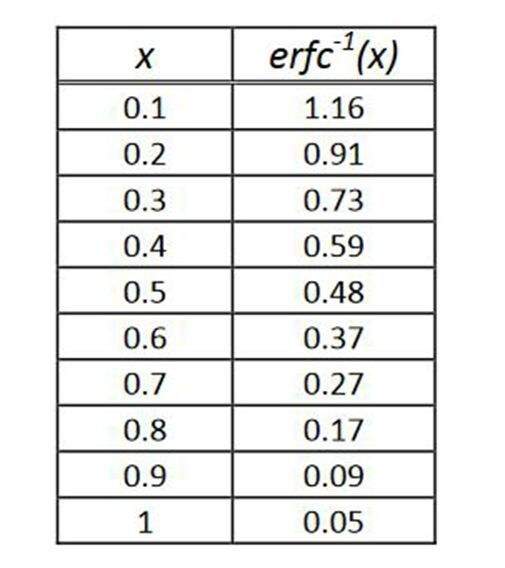
这个等式唯一棘手的部分是找到erfc的值。当然,我们将处理 <1 的值。表 1显示了温差的一些可能值。
表 1:erfc 的值
典型的 Arrosticino 由切成约 1 厘米厚(取决于类型)的肉组成,并插入长约 25 厘米的串肉串上。肉沿着烤肉串长度的大约一半向下延伸,烤肉串放在炉子上,裸木伸出边缘,让厨师转动它们,使肉在四个侧面均匀烹饪(图 2)。
图 2:每个 Arrosticino 都放置在距煤 7 到 15 厘米(可调节)的地方。基本设置将根据要烹制的arrosticini 的数量而有所不同。
解冻后烤肉前,厨师会用吸水纸将其擦干,等待其温度达到约室温。每面的平均烧烤时间约为 1 到 2 分钟(与煤的温度和与 Arrosticini 的相对距离有关)。
设计
该项目必须包括温度传感器来控制arrosticini 和煤的温度。肉的最佳温度将决定烹饪程度,因此有必要在设计阶段评估温差。硬件结构包括:
一个 Arduino 板2
温度传感器
显示煤和arrosticini温度的显示器。两个温度必须不同;操作者必须控制煤,使温度与起始温度相同。
一个风扇,以确保均匀加热,因此,均匀烹饪。在这种情况下,上述模型将呈现一个考虑到通风的相乘系数。根据编程,风扇可以在必要时打开,即当煤和肉之间的温差开始偏离时。
一个 I 2 C 显示屏,用于指示肉类烹饪的温度和控制文本
两台步进电机或直流电机——一台用来转动意大利面,另一台用来把它们从烤架上滑下来。这两个电机的速度必须同步。此外,有缺陷的温度变化应该会降低电机的速度,以使烹饪保持最佳状态。
使用的温度传感器是 PT100 传感器,通常在工业环境中找到应用,例如在工作期间测量温度的实验室。这些传感器的标称电阻由 IEC 751 标准确定,在等于 0°C 的温度条件下为 100 Ω。在 PT100 中使用热电阻使其能够在更宽的温度范围内工作,介于 –200°C 和 850°C 之间,具有出色的精度和互换性,稳定耐用(图 3)。
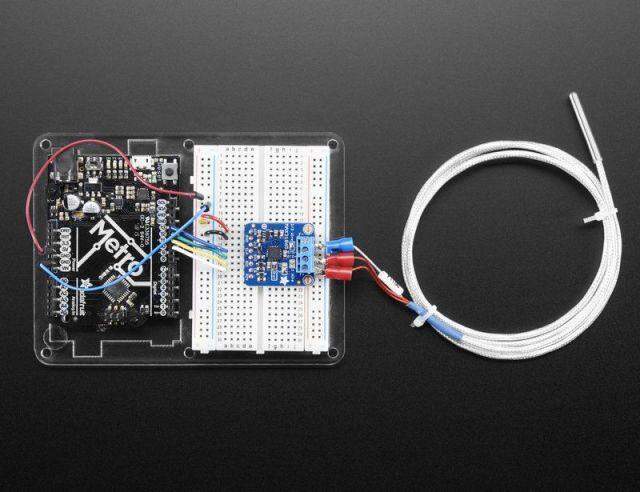
图 3:带有调节威廉希尔官方网站 的 Arduino 和 PT100 传感器
调节通过 MAX31865 完成,这是一款易于使用的电阻数字转换器,针对 PT100 等铂电阻温度检测器 (RTD) 进行了优化。外部电阻器设置所用 RTD 的灵敏度,精密 Δ-Σ ADC 将 RTD 电阻与参考电阻的比率转换为数字形式。Arduino 通过可在集成开发环境 (IDE) 中实现的库使这一点易于管理。无刷直流 (BLDC) 电机提供高效率,但最重要的是,具有出色的扭矩和速度值,适合广泛的应用。无刷直流电机的设计旨在优化与磁铁和线圈绕组相关的扭矩或旋转力的大小。磁体中的极对数越多,电机转矩就越大。3
Portescap 的 Ultra EC 平台提供一系列无刷电机系列,以满足不同的扭矩和速度要求。母公司的专利线圈最大限度地减少铁损以最大限度地提高效率。
Maxon 的 EC-i 无刷电机具有适合机器人应用的小直径。电机直径为 30 mm,具有高动态和高扭矩的特点。它有两种长度可供选择,每种都有标准版本和高扭矩版本,在 75 W 时最大额定扭矩高达 110 mNm。在所有版本中,新的 EC-i 30 电机都可以通过编码器、齿轮箱进行扩展、伺服控制器或定位控制器。
英飞凌科技的直流电机控制扩展板是首批与 Arduino 以及英飞凌基于 BTN8982TA IC 的 XMC1100 引导套件兼容的大电流电机控制板之一。DC Motor Control Shield 可以驱动两个单向直流电机(半桥配置)或一个双向直流电机(H 桥配置)。PWM 可以通过 IN 引脚控制 BTN8982TA NovalithIC 半桥(图 4)。
图 4:英飞凌 XMC1100 启动套件
我们项目中的 Arrosticini 可以连接到电动系统,每 1 到 2 分钟旋转 90°。完成 360° 旋转后,必须从煤中取出 Arrosticino。肉的味道取决于煤的温度,煤的温度变化很大(煤内部可以达到 900°C,距离为 10 到 20 厘米,而在 fornacella 中,温度可以达到 150°C 到300°C); 将肉加热到大约 150°C 会引发所谓的美拉德反应——这种化学反应使棕色肉具有独特的风味和香气。
需要进行校准,以使每个 Arrosticino 的运动与烤架和 Arrosticino 本身的温度相协调,以及将煮熟的肉转移到盘子上的滑动机构的运动。载玻片可以取下,操作员必须在烹饪时间过后小心取下它们。
因此,软件必须提供温度读取/设置和显示功能;电网温度控制算法评估偏差在原始温度的 5% 以内;和控制警报,例如 LED 和/或蜂鸣器模块。
在烤架上烹饪仍然存在保持温度尽可能恒定的实际问题。但这就是乐趣(和味道)所在!在开始烹饪之前,新手烧烤师需要研究烹饪时间如何影响味道。厨师在正确的时间定位和取出arrosticini的技巧也很重要。
电动控制系统需要使用前舱格栅,如图 5所示。我们将在烤架的一端连接我们的电机以执行旋转。
图 5:电动烤架
系统的“校准”将决定烹饪时间,通常每面大约 1 到 2 分钟,具体取决于个人口味以及火的温度。重要的是加煤时保持温度恒定。图 6展示了一个总体布局。
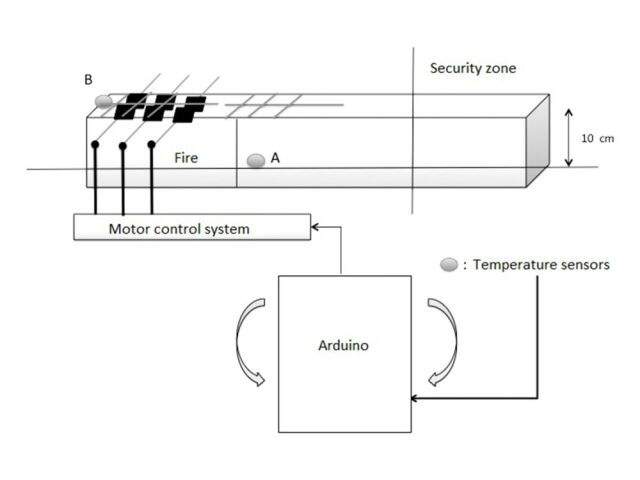
图 6:一般系统布局。可以通过 I 2 C将显示器连接到 Arduino 来添加显示器。
结论
这里介绍的硬件项目是实现其他解决方案的乐趣的基础。我们还没有描述在 Arduino 上实现的固件。但是硬件解决方案已经拥有允许您管理操作的库,可以轻松地将数学模型考虑在内。
-
开源硬件起步的 8 个步骤2021-09-16 0
-
怎样去使用MakerHub开源硬件呢2022-01-24 0
-
开源硬件发展前景2018-01-05 6076
-
开源硬件_最流行的几个开源硬件平台_Ardurino开源硬件平台2018-01-05 32287
-
开源硬件平台指的是哪方面开源_开源硬件究竟有多开源2018-01-05 5246
-
关于开源硬件的性能分析和应用2019-08-27 4110
-
机械臂开源硬件2022-12-01 874
-
Arduino手表开源硬件2022-12-16 692
-
门铃开源硬件2022-12-21 597
-
HBus开源硬件2022-12-23 731
-
音箱开源硬件分享2023-01-03 544
-
智能积木开源硬件2023-01-30 576
-
闪烁的LED开源硬件2023-02-01 393
-
AirBits开源硬件2023-02-07 450
-
开源硬件-警灯2023-06-09 466
全部0条评论

快来发表一下你的评论吧 !
