

 自动泊车,是鸡肋?还是未来?
自动泊车,是鸡肋?还是未来?
描述
对于很多车主朋友来说,“停车”这个驾驶过程中最后一个动作,恰是最困难的一步,如何正确、快速完成倒车入库、侧方位停车这两种最常见的停车方式,一直是新手司机急需解决的问题,一个可以协助司机正确停车的功能急需研发。
很多主机厂也发现了这一诉求,并研发出了自动泊车系统,自动泊车就是不需要人工干预,可以自动将车辆停到车位的系统,自动泊车系统作为高级辅助驾驶系统中较为代表性的一项功能,已逐渐从高端车型向中低端车型普及,自动泊车系统对于新手司机而言,可以带来更为智能和便捷的体验。搭载自动泊车系统已经成为众多造车新势力体现其潮流和科技的一项重要功能,对于众多传统主机厂来说,装载自动泊车功能也是体现其科技力的一种表现。
自动泊车发展历史
自动泊车系统最早可以追溯到1992年,大众在其IRVW(Integrated Research Volkswagen)Futura概念车上采用了自动泊车技术。IRVW是一款具有全自动泊车功能的汽车,驾驶员可以下车观看汽车自动泊车的全过程。行李箱中安装了如同个人电脑大小的计算机来控制整个自动泊车系统。大众当时估计这一功能会使汽车售价提高约3000美元,所以后来并没有将这套系统投入生产。
自动泊车功能正真实现商用化,则是在2003年丰田在日式普锐斯混合动力汽车上提供了可选的自动泊车功能,三年后,英国驾驶员花上700美元就可以在他们的普锐斯上增加自动泊车功能了。
2004年,瑞典Linkopeng大学的一群学生与沃尔沃(Volvo)合作开发了一个名为Evolve的项目。Evolve汽车可以自动顺列式驻车。这群学生在沃尔沃S60上装上感应器,并在行李箱里装上用来控制方向盘和加速及刹车踏板的计算机。西门子VDO正在开发一种名为ParkMate的独立驾驶员辅助系统,该系统可以帮助驾驶员找到车位并停好车。
自动泊车技术要求
为了让自动泊车系统可以将汽车自动停到停车位中,需要感知系统、决策系统和控制系统的相互协作,利用遍布车身的感知硬件,可以测量车辆距离停车位及停车位周边车辆/物体的相对距离、角度等信息,决策系统通过计算,让车辆实现加速、减速及转向等动作,使车辆可以自动/半自动停到停车位中。
自动泊车过程主要有五大环节,即环境感知、停车位检测和识别、泊车路径规划、泊车路径跟随、控制模拟显示;根据自动泊车方式的不同,可以将自动泊车分为平行式泊车、垂直式泊车和斜列式泊车。
其中环境感知将决定自动泊车的精准度,通过车身安装的超声波雷达,让待泊车辆可以对目标停车位周边环境进行感知,可以确认目标停车位周边是否有车辆、目标停车位具体的位置、车辆自身状态等信息,是确保自动泊车过程安全可靠的第一步,可以让待泊车车辆避免剐蹭。
在使用超声波传感器探测车位时,车辆以一定的恒定车速V平行行驶向泊车位:
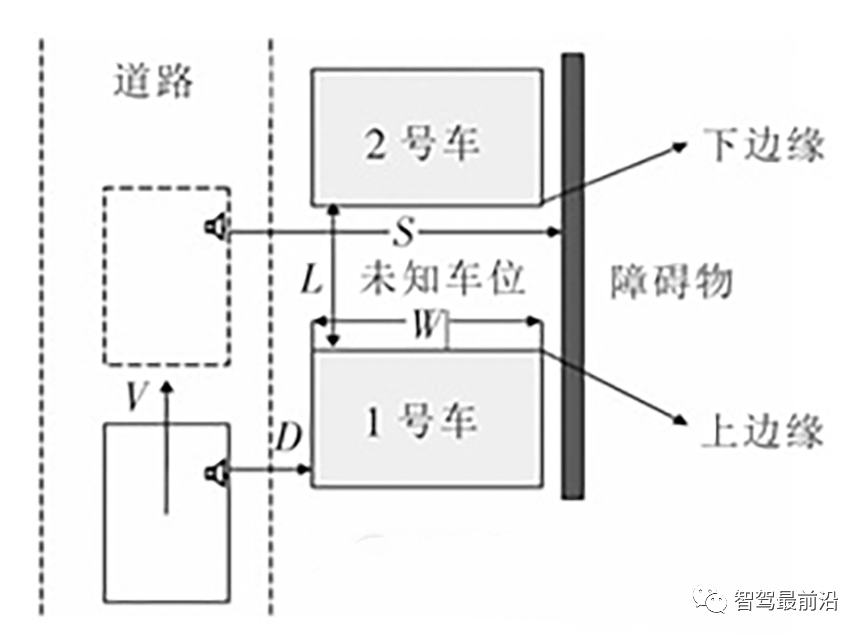
当车辆驶过1号车停放的位置时,装在车身侧面的超声波传感器开始测量车辆与1号车的横向距离D。
当车辆通过1号车的上边缘时,超声波传感器测量的数值会有一个跳变,记录此时时刻。
车辆继续匀速前进,当行驶在1号车与2号车之间时,处理器可以求得车位的平均宽度W。
当通过2号车下边缘时,超声波传感器测量的数值又发生跳变,处理器记录当前时刻,算得最终的车位长度L。
处理器对测量的车位长度L和宽度W进行分析,判断车位是否符合泊车基本要求并判断车位类型。
考虑到自动泊车实现原理,泊车路径规划一般尽可能满足以下要求:
完成泊车路径所需要的动作必须尽可能少。因为每个动作的精度误差会传递到下一个动作,动作越多,精度越差。
在每个动作的实施过程中,车辆的转向轮(绝大部分为前轮)的角度需要保持一致。因为系统是通过嵌入式系统实现的,而嵌入式系统的性能有限,转向轮角度保持一致能够将运动轨迹的计算归结为几何问题,反之需要涉及复杂的积分问题,这对嵌入式系统的性能是一个挑战。
自动泊车系统,顾名思义,最终应可以自动完成整套停车过程,但由于现阶段车辆上感知硬件及软件的局限性,自动泊车系统依旧需要驾驶员的介入,如通过对油门和刹车的控制来保证车辆泊车速度;对于常见的侧方位停车及倒车入库,多数自动泊车系统可以轻松应对,但对于斜方位车位,多数自动泊车系统依旧无法解决;且当出现停车位过小、停车位两侧均停放车辆且预留空间不足时,自动泊车系统也无法工作;对于极端天气或传感器出现污损时,自动泊车功能也会失效或异常。
自动泊车操作方式——以特斯拉Model Y为例
那自动泊车系统发展到底如何?以特斯拉Model Y为例,给大家进行具体介绍。对于特斯拉Model Y来说,自动泊车主要还是针对平行式泊车和垂直式泊车,无法处理斜列式泊车。在进行自动泊车前,需要确保感知硬件无脏污、停车位线需清晰,且下雨等环境中使用自动泊车系统时,也无法确保自动泊车功能的可靠性。
在进行平行式泊车时,行驶速度必须低于21 km/h,如果行驶速度过快,则无法准确探测到所需停车位;在要停入的停车位前面,必须要有车辆;路缘或边缘必须清晰可见,如果出现路缘不明显,自动泊车系统可能无法准确识别停车位。
在进行垂直式泊车时,行驶速度必须低于13 km/h,如果行驶速度过快,则无法准确探测到所需停车位;停车位宽度必须至少为2.2 m;停车位必须有三条可见的线(例如停车线、路标或明显的路缘),且自动泊车可能不适用于车库,如没有三条可见停车线的车库;自动泊车可能不适用于鹅卵石、砖块等有纹理的路面。
在对特斯拉Model Y进行自动泊车时,要进行以下几步操作:
1.需要在公路上缓慢行驶,观察触摸屏,看自动泊车系统是否探测到停车位,如果探测到了,则会在触摸屏上出现一个驻车图标。
2.需要驾驶员查看待停车位是否适宜、安全。将车辆停放在待停车位前方约一辆车长的位置。
3.松开方向盘,将特斯拉Model Y换入倒档,然后点击触摸屏上的开始自动泊车。
在需要暂停自动泊车时,需要踩下一次制动踏板。当需要取消自动泊车时,可以通过用手转动方向盘、换档或点击触摸屏上的取消进行实现,当出现泊车过程超过7个动作、特斯拉Model Y探测到驾驶员正在离开车辆、有车门打开、踩下制动踏板、发生自动紧急制动时,自动泊车功能也会取消。
当出现道路为坡道(自动泊车系统仅适用于平坦路面);能见度差(因大雨、大雪、浓雾等造成);路缘的材质不是石头,或者无法检测到路缘;待停车位紧邻着墙壁或柱子(例如,地下停车场中一排的最后一个停车位);一个或多个传感器(如果配备)或摄像头污损或受到阻挡(如被污泥或冰雪污损、或受到车辆前唇、多余的车漆或覆盖物、贴纸、涂胶等粘合剂产品阻挡);天气条件(如雨雪、浓雾、酷热或极寒温度)干扰传感器(如果配备)工作;传感器(如果配备)受其他可产生超声波的电气设备或装置的影响时,自动泊车功能可能无法工作。
自动泊车发展趋势
正如特斯拉Model Y对于自动泊车功能实现的众多要求,自动泊车系统似乎并不自动,虽然自动泊车系统现阶段已在大多数车辆上实现了搭载,但市场反馈并不如预期,据盖世汽车统计,76%的车主在使用自动泊车功能时,出现过各种各样的问题,自动泊车的可靠性并不高。
很多车主也向智驾最前沿反馈,对自动泊车功能的预期是在出现驾驶员难停车时,可以通过自动泊车系统轻松停车,但现实并非如此,对于驾驶员可以停入的车位,自动泊车系统可以停入;对于驾驶员需要花费很长时间才能停入的车位,自动泊车系统却无法停入;对于驾驶员难以停入的车位,自动泊车系统则更无可能完成操作。自动泊车系统,现阶段更像是一个鸡肋,无法正确满足驾驶员的需求。现在的自动泊车系统,更多的是让驾驶员体验科技带来的变化,并不能正真解决驾驶员“难停车”的问题。那自动泊车系统未来又会如何发展?
毋庸置疑的是,自动泊车系统会随着感知硬件与软件系统的技术提升,不断得到优化,让自动泊车可以真正解决“难停车”的问题。对于驾驶员难以停入的车位,自动泊车功能也可轻松应对,自动泊车,是汽车未来发展的趋势,更是汽车技术发展过程中必须完善的一项功能。
且随着技术的进步与需求的不断提升,自动泊车系统的功能也会更为全面,尤其是等到自动驾驶技术得以普及时,自动泊车系统则不仅仅要完成自动泊车的过程,还需要承担寻找停车位的过程,届时自动代客泊车技术将得到应用。自动代客泊车作为自动泊车的升级功能,承担着解决驾驶员用车最后一公里找车位难、停车难的问题,也将是实现自动驾驶落地必不可少的一项技术,此时自动泊车功能作为自动代客泊车技术中的一项重要操作,需要可以在没有驾驶员的协助下,完成各场景的自动泊车过程。
审核编辑 黄昊宇
-
自动泊车HiL仿真测试介绍#自动泊车 #VTHiL北汇信息POLELINK 2024-10-11
-
有关自动泊车系统设计,遇到难题2013-02-27 0
-
如何检测自动泊车控制系统2014-12-17 0
-
有谁做过自动泊车系统的设计吗2018-04-17 0
-
自动泊车辅助系统介绍2020-12-15 0
-
自动泊车是鸡肋?小鹏汽车的自动泊车,“老司机”也有做不到2019-05-15 6904
-
回顾360全景泊车和PA自动泊车差异性2019-08-09 8077
-
威马EVOLVE即将下线 自动泊车停车2021-01-04 2061
-
比亚迪被授权自动泊车相关的新专利2021-01-13 2289
-
什么是“自动泊车” 自动泊车”原理是什么2022-08-29 3766
-
“自动泊车”原理是什么?AVP落地该如何解决?2022-09-30 2935
-
车辆自动驾驶技术之自动记忆泊车原理分析2023-02-05 1258
-
用于自动泊车的超声波泊车传感器2023-08-23 1322
-
自动泊车和遥控泊车的区别2024-01-31 1872
全部0条评论

快来发表一下你的评论吧 !
