

ROV水下作业仿真平台:龚嘴水电站坝体检测和清理作业仿真
电子说
描述
导读:本文系“2021一带一路暨金砖国家技能发展与技术创新大赛”中获得团体二等奖项目,参赛队伍来自哈尔滨工程大学。指导老师是昝英飞教授,队员分别郭睿男,邱天和宋友鹏。正值仿真秀2023机器人工业品技术交流月如火如荼,2月27日19时30分,我们将邀请哈尔滨工程大学的船舶与海洋工程行业专利奖优秀奖、中国造船工程学会科技进步一等奖获得者、仿真秀特聘讲师郭睿男博士分享《水下机器人建模方法与仿真分析技术》介绍ROV水下作业仿真的建模方法和关键技术,并讨论水下机器人作业仿真技术的发展方向和应用前景,详情见后文。
摘要:针对遥控水下机器人(ROV)作业的仿真预演与培训,基于开源框架开发ROV水下作业仿真平台,实现六自由度ROV和机械手运动。仿真平台包括人机交互模块、路径跟踪模块、PID 控制器模块、推力分配模块、ROV运动学和动力学解算模块。进行开架式ROV龚嘴水电站坝体水下检测作业仿真。利用路径跟踪技术扫描水坝检测区域,确定泄洪口异物位置,由驾驶员操纵ROV和机械手清理异物。针对ROV位姿、推力等输出信息,分析检测作业并提出优化方案。
一、引言
ROV水下作业仿真平台适用于海洋工程、海洋科考、水利水电工程等典型领域的ROV作业仿真。通过ROV作业仿真平台进行作业仿真预演与培训,可以增强ROV作业安全性,提升作业效率,节约作业成本;开展作业风险评估、作业方案预演和团队模拟演练;根据作业仿真结果,评估优化作业方案,提供作业安全限界和建议。ROV作业仿真平台可基于虚拟现实技术实时再现深海 ROV 作业三维场景,可为深海 ROV 水下作业提供从方案设计到现场施工过程的技术支撑;可以通过硬件集成,进行ROV水下作业运动估算与辅助定位,实现作业人员与 ROV 装备的最佳结合,对提升 ROV 作业人员技能、作业效率、作业安全性具有重要意义。
ROV水下作业仿真平台适用于海洋工程、海洋科考、水利水电工程等典型领域的ROV作业仿真。通过ROV作业仿真平台进行作业仿真预演与培训,可以增强ROV作业安全性,提升作业效率,节约作业成本;开展作业风险评估、作业方案预演和团队模拟演练;根据作业仿真结果,评估优化作业方案,提供作业安全限界和建议。ROV作业仿真平台可基于虚拟现实 VR 技术实时再现深海 ROV 作业三维场景,可为深海 ROV 水下作业提供从方案设计到现场施工过程的技术支撑;可以通过硬件集成,进行ROV水下作业运动估算与辅助定位,实现作业人员与 ROV 装备的最佳结合,对提升 ROV 作业人员技能、作业效率、作业安全性具有重要意义。
ROV水下作业仿真平台的开发解决了海洋工程作业中存在的两个问题,即,ROV作业方案大多基于经验制定,缺乏作业安全的科学验证手段,应用ROV水下作业仿真平台对作业进行模拟,可以对作业风险进行评估;ROV水下作业时间长,水下作业支持船舶使用成本高。应用ROV水下作业仿真平台进行作业预演和人员培训,可以优化海洋工程作业流程和方案,减少不必要的浪费。
ROV水下作业仿真平台对于提高ROV作业安全性和作业效率,完善ROV作业技术和支撑装备体系具有重要意义。基于ROV水下作业仿真平台为人员技能提升、风险事前规避、在线决策支持等提供技术保障;为实时作业成果再现、作业规划和培训等应用功能提供技术支撑;对提高深水ROV作业效率与安全性具有重要意义。
ROV水下作业仿真平台可以结合VR技术实现实时水下三维视景,所以可用于数字孪生体进一步研究。ROV水下作业仿真平台的开发进一步提升企业科技成果转化能力和高校科技创新能力,开发过程中与上海遨拓深水装备技术开发有限公司和深圳海油工程水下技术有限公司等相关单位在产学研用的深度合作,对提高我国海洋工程装备与配套体系建设、实现“十四五”时期加快壮大新一代海洋装备等产业的目标任务具有重要意义。
ROV作业仿真平台为深海空间站、深海矿藏开采等水下作业提供科技支撑,为海上作业向数智化发展提供必要手段,推动ROV相关设备的技术更新,具有显著的经济和社会效益。
ROV水下作业仿真平台已完成海试实验,并为荔湾 3-1 气田、文昌 9-2/9-3 气田群等典型工程项目提供了ROV作业方案评估及人员培训支持,同时为东海石油管道、内河水电站坝体、长隧道涵洞等检修等提供了仿真技术支持。本文介绍基于开源框架的ROV水下作业仿真平台的开发,以及应用仿真平台进行的龚嘴水电站坝体检测作业仿真。
二、仿真平台的搭建
1、研究对象
仿真平台基于开源框架自主开发,实现了ROV水下路径跟踪,PID控制和8推进器的推力分配。仿真平台支持人机交互,利用手柄操作ROV和机械手运动。主要研究对象为一种典型的大功率工作级开架式ROV。该型ROV长 3.5 m,宽和高为2 m。推进器最大推力约为9000 N,纵向航速小于3.2 kn,机械手工作范围1.8 m,最大负载能力250 kg,腕部最大力矩170 Nm。
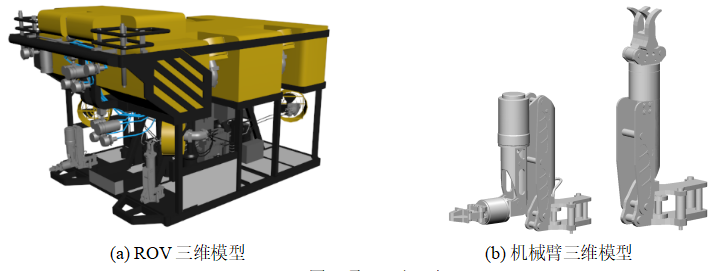
图 1项目研究对象
2、水下作业仿真平台模块
ROV作业仿真平台支持两种作业模式,可预设ROV路径,通过路径跟踪模块实现ROV自动巡航,也可以依靠手柄控制速度增益,由领航员控制ROV航行。路径跟踪模块和人机交互模块将外部信息转换为指令速度通过PID控制模块计算实现指令速度的动力和力矩。仿真平台包括人机交互模块、路径跟踪模块、PID 控制器模块、推力分配模块、ROV运动学和动力学解算模块。
人机交互模块将手柄信号转化为指令速度,实现半物理仿真;路径跟踪模块基于LIPB方法光滑ROV路径;PID 控制器模块基于反馈线性化的PID控制器计算实现指令速度的动力,PID参数基于田口法和序列二次规划针对ROV位姿进行优化;推力分配模块根据ROV建立推力系数矩阵和推进器布置矩阵,推力分配模块将PID控制模块的动力转化为8个推进器的推力;ROV运动学和动力学解算模块根据推力,基于ROV操纵性数学模型计算ROV位姿;仿真平台输出变量ROV的重心的位置、姿态角(基于四元数变换)、速度。
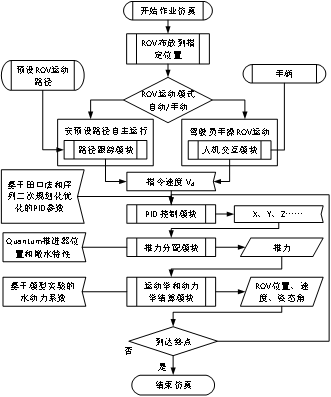
图 2 ROV动力学仿真模块
(1)路径跟踪模块
路径跟踪模块基于混合多项式线性插值方法光滑路径,直线运动部分应用线性插值,转弯处应用五阶贝塞尔曲线插值,通过插值结果的有限微分计算指令速度。LIPB插值点为:
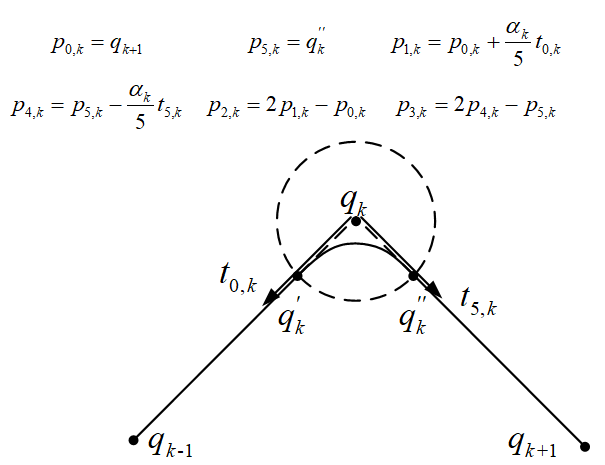
图 3 多项式线性插值
(2)PID 控制模块
PID 控制模块采用解耦的方式计算ROV的水动力,选择指令加速度作为带加速度前馈的PI控制器,计算空置率。由于ROV运动方程具有非线性项水动力,为提高闭环反馈的计算效率,采用反馈线性化控制器,提高闭环反馈的计算效率。选择控制律:

进行线性化
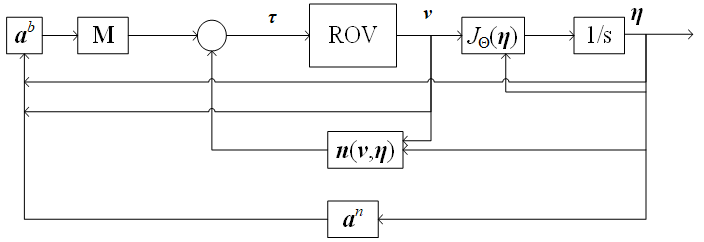
图 4 反馈线性化控制器
(3)推力分配模块
ROV有8个推进器,四个为垂向推进器,四个为水平推进器。根据ROV的推进器具体布置建立推进器推力(力矩)公式:

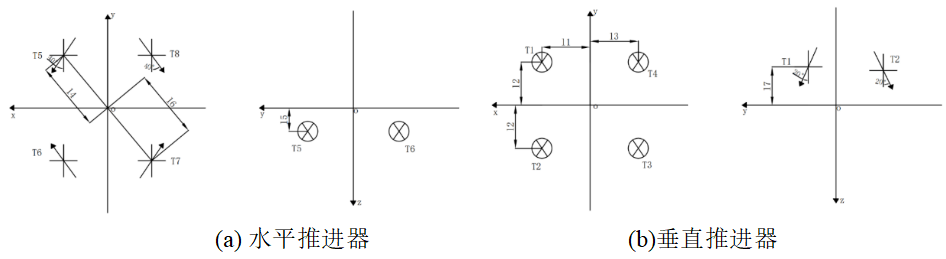
图 5推进器布置
(4)ROV运动学和动力学解算模块
分别建立固定坐标系和随体坐标系,通过主轴坐标和旋转角度定义四个欧拉参数,依据四元数建立坐标变换矩阵。固定坐标系

其中 N 与 E 构成的平面与地球表面相切。另一个坐标系则为随体坐标系
也称为动系。主轴
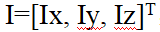
以及角度 。所建立的ROV六自由度操纵性数学模型考虑非线性水动力,ROV操纵性数学模型:
。所建立的ROV六自由度操纵性数学模型考虑非线性水动力,ROV操纵性数学模型:

用角度和单位矢量 l 的分量来定义的利用四个欧拉参数:
其中
基于四元数的坐标变换:
图 6 坐标系与参数
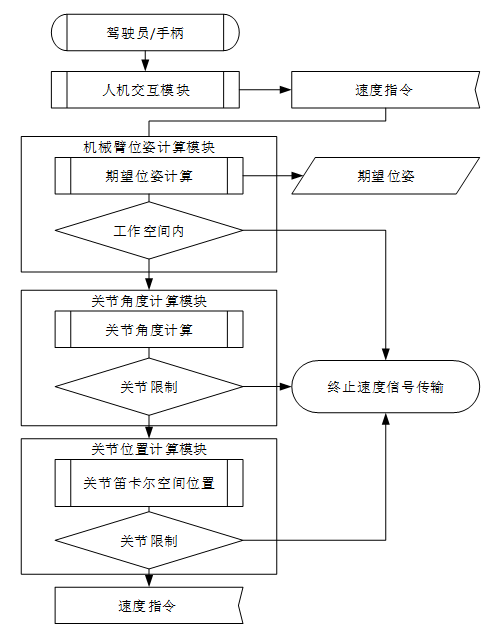
(5)机械手动力学仿真模块
机械手动力学仿真模块包括:人机交互模块、机械臂位姿计算模块、关节角度计算模块、和关节位置计算模块。手柄指令通过人机交互模块转化为指令速度,经由机械臂位姿计算模块,根据速度信号和机械臂当前位姿计算期望位姿,并判断期望位姿是否满足机械臂的工作空间;如果机械臂位姿处于工作空间内,则经由关节角度计算模块通过逆运动学模型求解机械臂关节的角度,并判断各关节角度是否满足关节限制,即考虑逆运动学解的存在性问题,如果逆运动学有多个解,则选择机械臂每一个关节移动量最小的解。关节位置计算模块通过运动学模型计算期望位姿下各关节空间位置,并判断关节是否满足笛卡尔空间限制。
三、水电站坝体检测作业
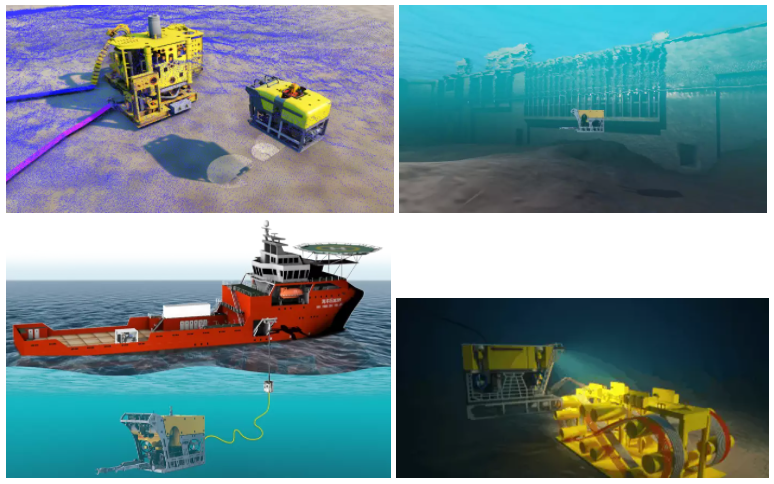
ROV由于其实时性好、稳定性强、续航时间长等优势能够满足绝大多数水利水电工程领域的应用需求,我国已将ROV应用于水利水电工程领域。其中有缆遥控水下机器人的应用主要包括水库大坝闸门的水下检测与清理,消力池的水下检测,水库大坝坝体的水下检测。大坝闸门的水下检测与清理作业是在闸门开启前,确认闸门槽内的异物状况,如有必要应清理淤积异物,确保综合评估认为不存在安全隐患,利用水下定位系统、水下多波束图像声纳系统,对ROV的水下位置进行确定,同时掌握水下建筑物的结构形状。
后续操作人员可通过操作遥控手柄,将ROV遥控至闸门处。通过水下高清摄像和声呐扫描的方式进行观察。岸上操作人员通过操控机械臂可快速开展堆积物清理工作,并可通过图像实时评估完成进度,为水坝闸门的落放提供了有利的安全保障,相较于潜水员水下作业具有安全性高、工作时间长、作业深度深、操作性简便等优点。
消力池的水下检测作业中,在水质较好的清水环境内,可利用ROV水下高清摄像以及机械手等设施,进行水下消力池底板的稳定性检测,采用多波束声纳图像并结合水面光线辅助定向措施后,系统便能可清晰辨识消力池的轮廓及尺寸。大坝库区面积大、水质清,因此可以采用ROV进行具体的水下检测,充分发挥ROV的水下优势。通过ROV携带的水下多波束图像声纳系统对大坝坝体进行检测,确定大坝的渗漏位置,再利用基于CNN的高清摄像技术对渗漏处进行视频观察,同时通过电脑存储图像资料及ROV的位置信息,为后期大坝坝体加固提供资料。
ROV在水利工程中的应用需要克服的3个工程作业的困难:
第一,ROV成本相对偏高,而且水利水电工程检测任务越复杂,ROV 检测成本会越高;
第二,ROV 操作要求高,操作员需要具备丰富的经验,需要熟悉设备和传感器,同时需要具备海洋物理、空间几何等方面知识和良好的心理素质;
第三,水下环境复杂多变,水流、能见度等因素都会影响 ROV 操作。
应用ROV水下作业仿真平台可以有效解决上述3方面制约:预先规划仿真方案,利用ROV水下作业仿真平台进行方案预演,根据仿真结果调整检测方案,可以节约检测作业时间,减少作业成本;结合水库坝体和三维地形数据,不断改变环境条件,通过ROV水下作业运动仿真平台进行ROV检测作业培训,使操作员熟悉作业环境并积累经验;结合三维视景仿真和VR技术,将ROV的水下作业直观展示给操作员,排除能见度和摄影机限制;结合VR技术观察坝体裂缝和消力池轮廓的三维形态,辅助检测作业。
3.1 检测目标和任务
本文应用ROV作业仿真平台对龚嘴水电站坝体进行检测和清理作业仿真,龚嘴水电站位于四川省乐山市沙湾区与峨边县交界处的大渡河上,坝址以上流域面积 76130 km2,多年平均流量 1500 m3/s。拦河坝为混凝土实体重力坝,坝顶高程530.5m,坝顶全长447m;本次检测作业选择闸门段作为检测作业仿真的研究对象,仿真对象宽85.3 m。仿真平台中的坝体根据龚嘴水电站建模,坝体模型与龚嘴水电站闸门段一致。坝体检测仿真有三个主要任务:1)预设ROV轨迹,基于路径跟踪技术扫描整个检测区域,记录扫描内容,确定闸门异物位置;2)驾驶员手操ROV到达异物位置,操纵机械手清理异物。3)根据仿真结果,分析检测作业的可行性,评估作业方案,提供优化的意见。
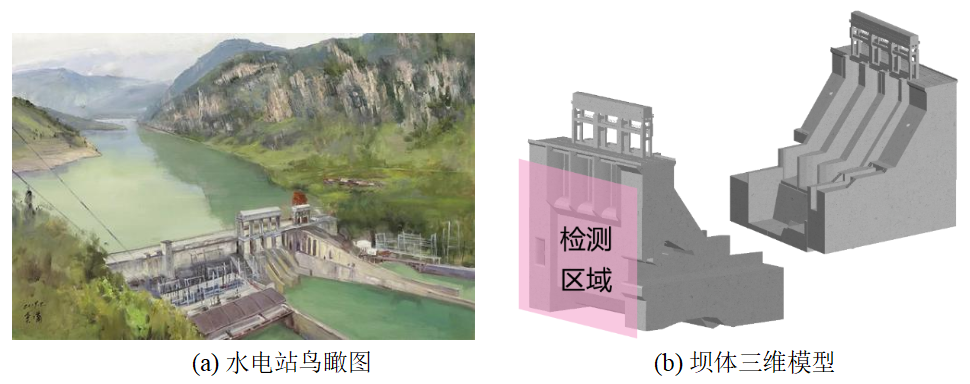
图 7 龚嘴水电站
3.2 检测流程与步骤
龚嘴水电站坝体检测和异物清理仿真流程主要包括4步:第一步,教练员选择ROV的初始位置和姿态,确定水下流速和流向等环境,然后领航员开始作业仿真;第二步,领航员根据闸门段结构特点,进行检测路径规划。观察ROV水下作业仿真平台中仿真段坝体模型,确定闸门位置和尺寸,根据检测区域和待检测面积确定ROV的下潜深度以及ROV到坝体壁面的距离并设定路标点。
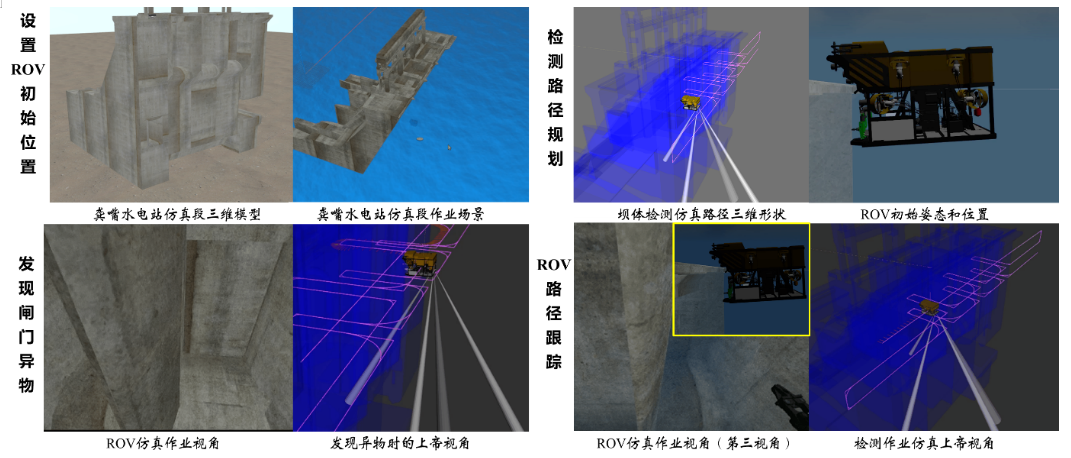
图 8坝体检测步骤一和二
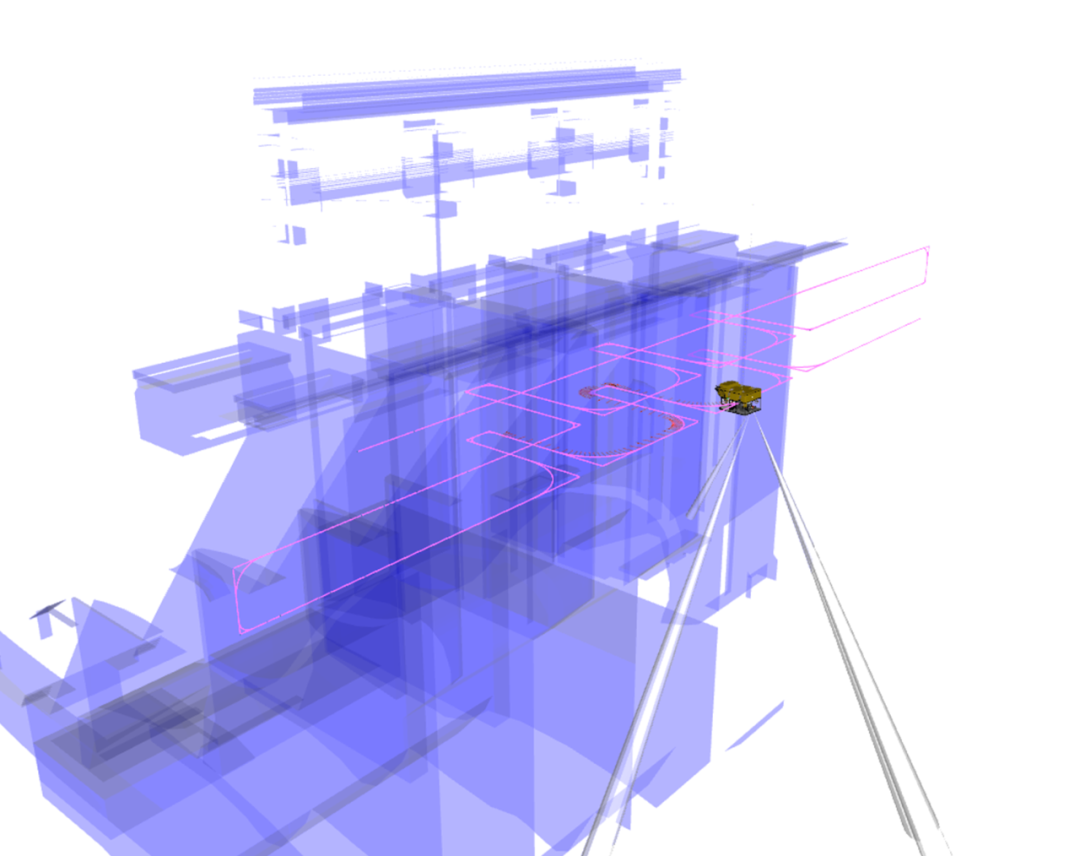
第三步,领航员使用路径跟踪功能,使ROV沿预定路径巡航,记录摄像机影像,当发现闸门处异物时记录坐标;在ROV检测作业过程中,可以改变第三视角直观感知ROV姿态和位置,观察ROV是否与坝体壁面发生碰撞。第四步,当ROV的自动巡航检测结束后,由领航员驾驶ROV到达闸门异物位置,通过机载摄影机观察异物情况,通过操纵机械臂清理闸门异物。
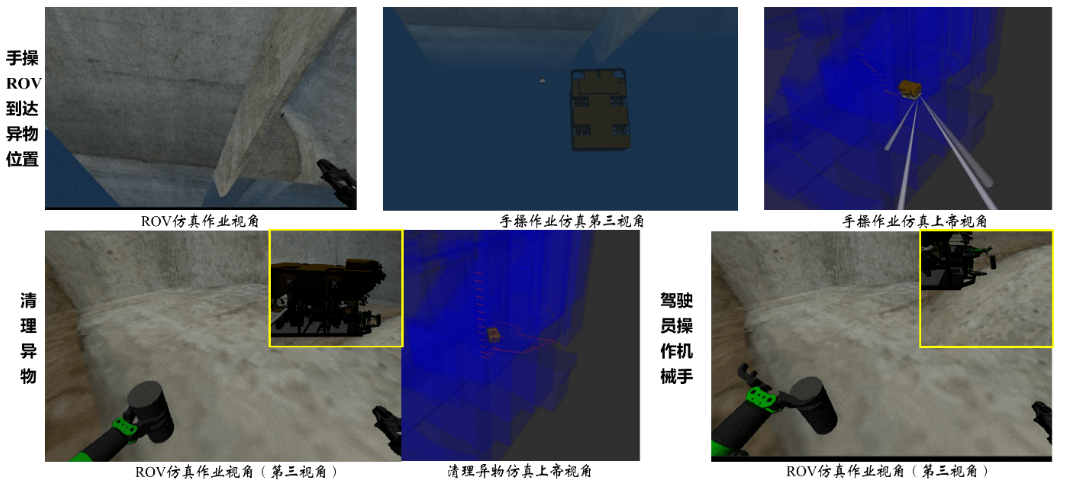
图 9坝体检测步骤三和四
3.3 坝体检测仿真结果分析
ROV起始位置位于水坝北侧水下10米位置,首先向南水平巡航,扫描水闸以外上部坝体,然后下潜5米向北巡航检测水闸上部,检测期间为了细致观察水闸附近异物情况,ROV将探入水闸附近,并依次进行水平巡航检测,检测完毕后再下潜5米,向南检测水闸下部,最后再水坝南侧深20米处完成检测。我们输出了检测全过程中的推进器推力,以及ROV的姿态角,其中姿态角经由四元数换算得到。从仿真结果中发现,当ROV转艏时,推进器推力分布发生较大变化,改变推力的瞬间ROV速度出现极大的扰动,但由于进行发聩线性化的PID控制,推进器推力针对加速度反馈做出调整,使速度和角度迅速回归期望值,所以检测路径较为光滑。
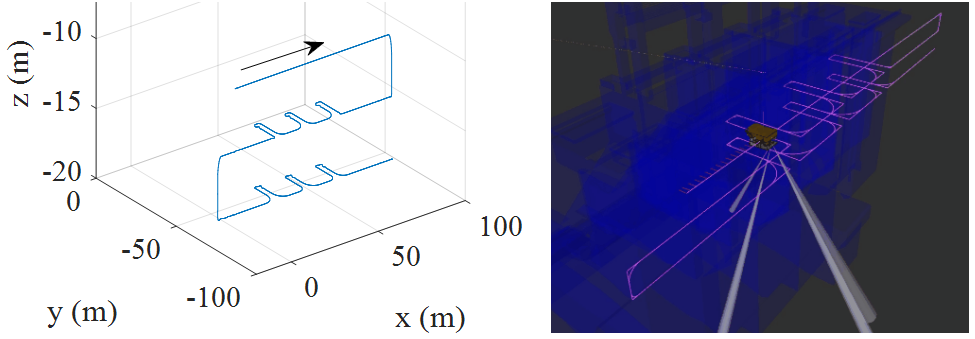
图 10 检测路径
仿真作业中ROV距离坝体壁面3.5 m,在垂向上重叠0.3 m;欧拉常数和ROV位置的误差峰值主要发生在转弯处,此时为改变ROV艏向,改变推力分配,产生了较大的扰动;欧拉常数中,旋转角度误差较大,纵向欧拉常数误差最小;ROV位置中,东方向位置误差最大,深度方向误差最小;坝体检测作业可针对欧拉常数的旋转角度和东方向位置进行优化,改变PID控制参数;减小视野重叠,并调整规划路径的垂向位置。
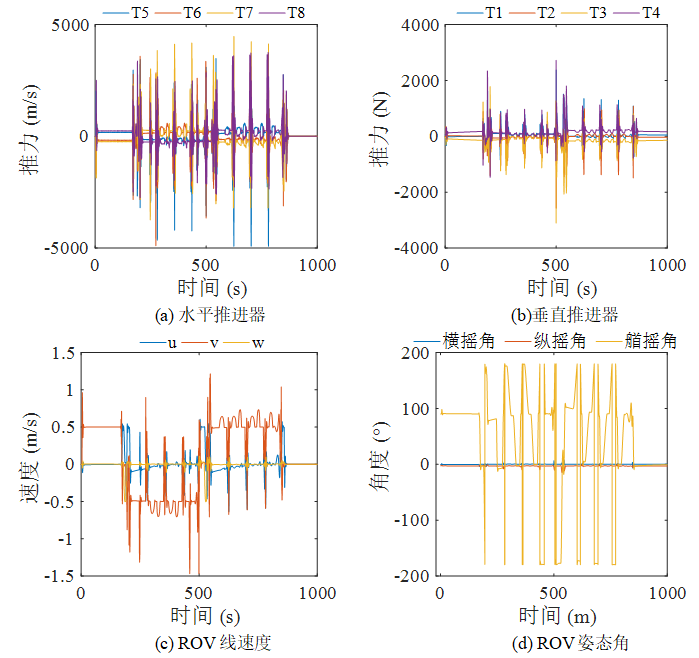
图 11 ROV的推力和位姿
四、水下机器人建模与仿真公开课
本文介绍了ROV水下作业仿真平台和龚嘴水电站坝体检测,可以得到如下结论:
第一、基于ROV水下作业仿真平台完成了坝体检测和闸门异物清理作业预演,根据位姿和误差等输出结果对检测和清理作业进行了评估;
第二、ROV水下作业仿真平台进行相关水下作业具有实际的工程应用背景;ROV水下作业仿真平台的开发不仅解决行业重大问题,仿真平台可以在线模式并结合VR技术辅助实际水下作业,可用于数字孪生体进一步研究;
第三、ROV水下作业仿真平台仿真结果与模型实验数据对标,ROV水下作业仿真平台能够较好的模拟了ROV和机械手的运动,与模型实验相比基本吻合;
第四、ROV水下作业仿真平台已经应用于荔湾 3-1 气田、文昌 9-2/9-3 气田群等多个海洋工程项目,并且得到了验证。基于开源框架开发的ROV水下作业仿真平台,可以公开计算模型作为教学案例或行业研究学习。
为了帮助大家更好理解ROV作业仿真,2月27日,仿真秀机器人工业品仿真第六期讲座《水下机器人建模方法与仿真分析技术》将邀请笔者带来《水下机器人建模方法与仿真分析技术》线上公开课。本期讲座将概述水下机器人及其作业仿真技术的背景,介绍ROV水下作业仿真的建模方法和关键技术,讨论水下机器人作业仿真技术的发展方向和应用前景,最后展示ROV的水电站坝体检测作业仿真。
审核编辑 :李倩
-
水电站计算机监控系统干扰的主要来源2011-12-15 0
-
水电站下泄计量设备2021-06-29 0
-
资料分享:水电站下泄生态流量监控解决方案2021-06-30 0
-
水电站计算机论述2021-09-10 0
-
什么是全数字仿真平台2021-12-17 0
-
基于PC的水下作业控制系统的研究2009-07-30 381
-
基于模糊推理水下作业系统运动控制研究2009-12-14 599
-
三维虚拟仿真平台,三维虚拟仿真平台是什么意思2010-04-10 5957
-
ADS无线协同仿真平台2011-10-11 1276
-
遥控机器人在深水A油田卧式采油树作业中的应用资料说明2019-05-06 963
-
集成威廉希尔官方网站 | 电站虚拟仿真技术在高职实践性教学中的应用2019-06-11 4130
-
小水电站生态流量监管平台2023-07-07 743
-
CAN模块在井下作业中的应用2024-09-20 221
-
水电站生态下泄流量监测系统:实时捕捉流量的细微变化2024-12-19 103
全部0条评论

快来发表一下你的评论吧 !
