

齿轮基础知识:反冲与空转
电子说
描述
电机位置控制精度的重要性因应用而异。对于带有直流电机驱动轮的农场中的 AGV,位置控制精度可能不像手术机器人那样重要,手术机器人的切口由伺服电机或步进电机控制。
我们自己建立了一个,现在我们知道了解每个制造商的所有不同规格和术语是多么困难。重要的是要有一个清晰的理解,以避免以后发生潜在的灾难。 < >7轴机械臂
在电机和齿轮箱组装产品中,“背隙”被列为标准规格,用于表示电机和负载之间的传动部件(即:齿轮、导程/滚珠丝杠)的机械精度。然而,某些类型的齿轮没有齿隙,因此使用另一个术语“空转”来描述机械精度。
| 什么是反弹? |
齿隙是指电机齿轮箱内啮合齿轮之间的游隙或间隙。当大约 2% 的负载扭矩施加到齿轮轴上时,会测量扭转齿隙。出于多种原因,强烈反对是必要的。首先,齿轮制造并非 100% 完美。制造公差、轴承尺寸、热考虑因素和其他实际考虑因素导致了这种不准确性。其他原因是为润滑剂留出空间、减少齿轮中的摩擦和/或允许金属膨胀。
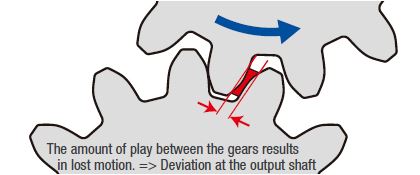
减速机或齿轮箱用于增加电机的扭矩(和惯性负载)并降低速度。它包含外壳、齿轮、轴和轴承。当齿轮啮合在一起时,齿轮之间实际上有一个微小的间隙。这在精度很重要的应用中引入了不准确性,因为负载轴可能会移动间隙的距离。看下图会更容易理解。
| 反弹的差异 |
根据其设计不同,会表现出不同程度的反冲。例如,正齿轮的齿隙最大,行星齿轮箱的齿隙小,谐波齿轮箱没有齿隙。市场上还提供混合谐波行星齿轮箱。 < >齿轮技术
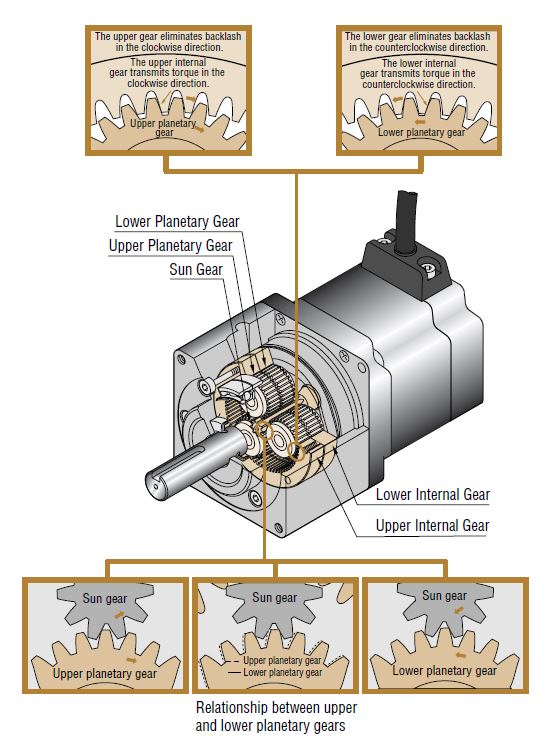
这是一个行星齿轮设计如何最大限度地减少齿隙的示例。
| 齿轮类型与齿隙 |
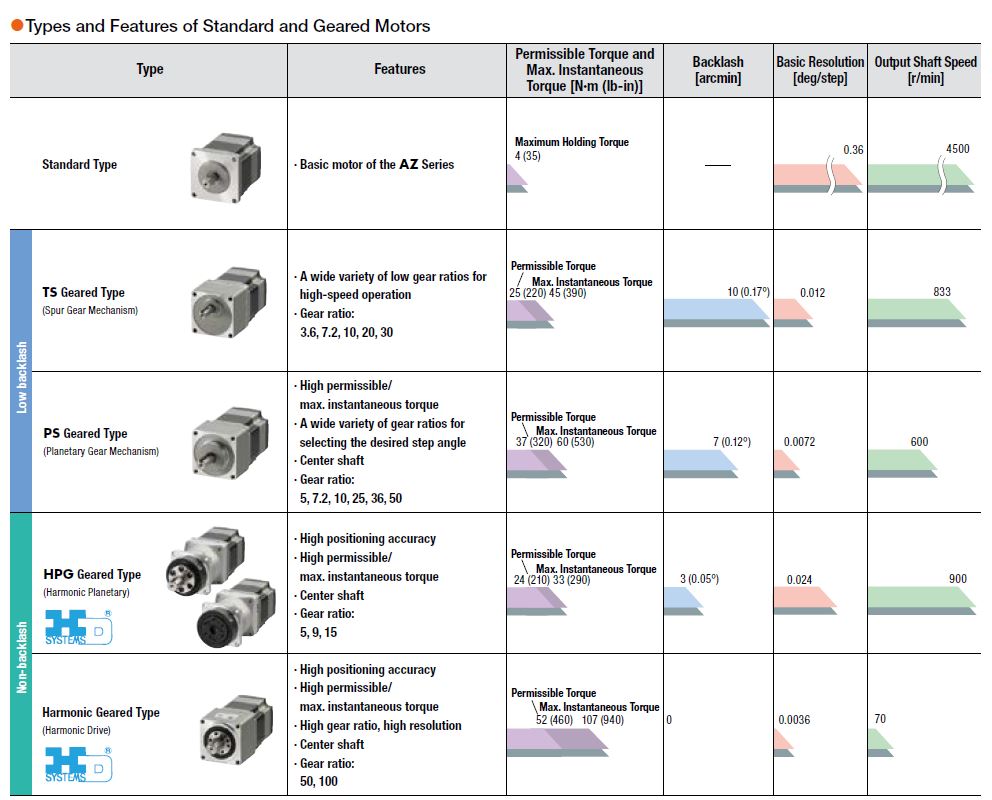
下表按齿轮类型、特性、扭矩、齿隙、基本分辨率和输出轴速度列出了我们的大部分减速电机。
| 为什么反弹很重要? |
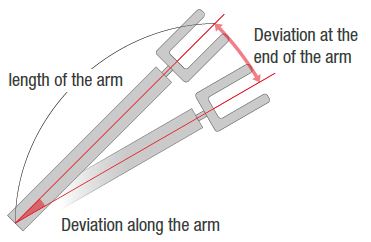
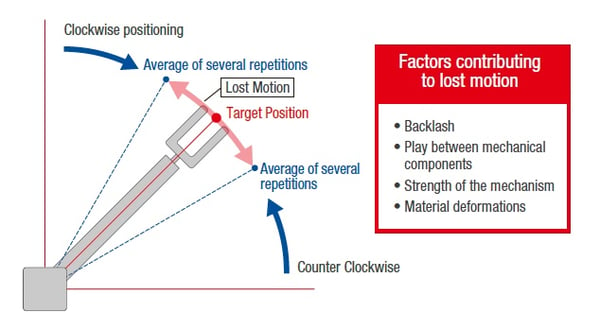
齿隙以度或弧分或弧秒为单位测量。虽然这在电机上看起来可能是一个非常小的值,但在某些应用(例如机械臂)中,此误差会随着距离的增加而增加。下图显示了从手臂的一端到另一端的偏差有何不同。
| 什么是丢步? |
当应用约 5% 的最大扭矩时,空转是系统中从相反方向反复接近某个位置时的最大偏差。由于施加的扭矩,工程师经常将空转与扭转反冲混淆。空转是一个更广泛的术语。导致空转的因素有齿隙、齿隙、传动机构的强度和材料变形(机械滞后损失)。由于谐波齿轮没有背隙,空转被用作齿轮精度的参考。
| 有什么方法可以消除反弹? |
这取决于。简单的方法是购买谐波齿轮步进电机(无反冲)。
| 提示:一个老把戏 | ||
|
|
对于双向应用,诀窍是每次都从同一个方向接近目标位置。 让我们以一个简单的应用程序为例。您的电机正在 0 到 90 度之间来回运动。但是,当您返回原位(0 度)时,双向运动的反冲会导致负载在精度公差之外停止。 下一次,执行相同的两个动作,但是当你回到起始位置时,有意稍微超过起始位置,停下来,然后再次接近它(从与 90 度移动相同的方向)。这样,电机始终沿相同方向接近目标位置。反弹被消除。但是,这仅适用于移动之间有额外停留时间的应用程序。 |
| 概括 |
齿隙是齿轮箱中齿轮齿之间的游隙或间隙。换句话说,齿隙是齿轮轴的运动,而电机轴是固定的。用数学术语来说,它是啮合齿轮之间的空间宽度减去一个齿轮齿的宽度。
空转是指在减速机输出轴上施加相当于容许扭矩 5% 左右的负载扭矩时,在两个方向上发生的总位移。 换句话说,空转是电机轴运动时齿轮轴的运动损失,包括齿隙和齿轮滞后损失。
反冲是空转的一个组成部分。
对于需要最高位置控制精度的应用,建议使用谐波减速机。如果应用可以接受一点反冲,则建议使用谐波行星或行星齿轮箱。对于通用应用或单向应用,直齿或锥形滚齿可能就足够了。当然,更高的精度成本更高,因此请考虑您的预算。
请记住,运动控制的不准确性是系统中所有单独组件的组合。除了电机和减速机之外,还必须考虑其他组件的精度。
< >白皮书:步进电机减速机
谢谢阅读。你如何消除反弹?请给出意见!
审核编辑 黄宇
-
起动机空转故障的诊断方法2011-01-13 0
-
labview基础知识2018-03-08 0
-
一文汇总齿轮机构的基础知识2018-10-31 0
-
EMC基础知识2019-06-06 0
-
通信基础知识教程2010-03-04 815
-
QC基础知识2010-06-02 1339
-
软板基础知识2006-06-30 1323
-
电子威廉希尔官方网站 基础知识2008-01-15 231011
-
电池基础知识(集全版)2009-11-10 2513
-
电池隔膜基础知识2009-11-17 1152
-
计算机基础知识介绍2015-12-03 885
-
使用Eclipse基础知识2016-02-26 879
-
synplify基础知识说明2016-06-17 2123
-
电源管理基础知识电源管理基础知识电源管理基础知识2017-09-15 1524
-
优质LDO基础知识分享2023-03-26 1353
全部0条评论

快来发表一下你的评论吧 !
