

TDK | 扫地机器人如何感知周边环境?
电子说
描述
前言
服务型机器人在社会中的作用越来越重要,广泛见于诸如从运输和仓储物流到家庭娱乐和安全应用的各个领域。但无论是哪种应用,机器人都需要实时感知周边环境的变化,以确保安全,同时提供积极的用户体验。
本期推文就以代表服务型机器人的扫地机器人 (RVC) 为例,介绍TDK的SmartSensor系列传感器和其丰富多彩的传感器技术在服务型机器人领域的应用方案。
早期版本的扫地机器人智能程度不高,存在诸多缺陷,例如无法正确规划清扫路线而导致清扫范围不全面,或者是清扫途中因剩余电力不足而停止在原地。而且其尘盒通常比传统有线吸尘器要小,无法即时感知尘满状态,导致无效清扫的情况时有发生。近年来,随着传感器和电机控制器创新技术的应用,扫地机器人的性能也得到了极大的提升,变得更加智能,具备了以下特点。
高精度移动
不管扫地机器人如何变化,其基础都是高精度移动。对此,TDK提供能直接控制各种步进电机、有刷 (BDC) 和无刷 (BLDC) 直流电机的智能HVC 4222F嵌入式电机控制器。它们能精确控制驱动转动齿轮的电机,以确保扫地机器人的车轮始终朝正确的方向移动。高精度控制对于确保扫地机不偏离预定路线至关重要,此类机械要素的高精度控制与传感器的搭载与否无关,精确知晓车轮转动的角度 (比如是90度而非88度) 对于确保扫地机器人在某个时段内处于适当的位置至关重要。
检测地板类型、断桥断面个障碍物
超声波飞行时间 (ToF) 传感器 (例如CH101和CH201,可分别在最远1.2米和5米范围内精确测量目标距离) 会发出超声波脉冲,并在传感器视场 (FoV) 监听物体反弹的回波。随后,内置处理单元会通过计算超声波的飞行时间来确定目标距离,并发送到外部控制单元。与光学距离传感器不同,超声波传感器能在任何照明条件 (包括黑暗环境) 下工作,具有毫米级的测量精度,且不受目标颜色的影响,即使是玻璃等透明物体也不例外。用于长距离检测的CH201可帮助扫地机器人在无论昼夜环境下都能够精确探测到任何移动和静止的物体,以便其及时改变行走路线避免发生碰撞;另一款用于短距离检测的CH101超声波ToF传感器则可帮助扫地机器人确定不同的地板类型。因为表面软硬程度不同的物体,其反射回的超声波信号振幅也不同。当扫地机器人从木地板区域移动到铺有地毯的区域时,传感器可以发出指令让电机加速,因为在地毯上的移动阻力更大,需要更强的驱动力。此外,这些传感器还能检测到扫地机器人是否已移动到楼梯边缘,避免摔落。
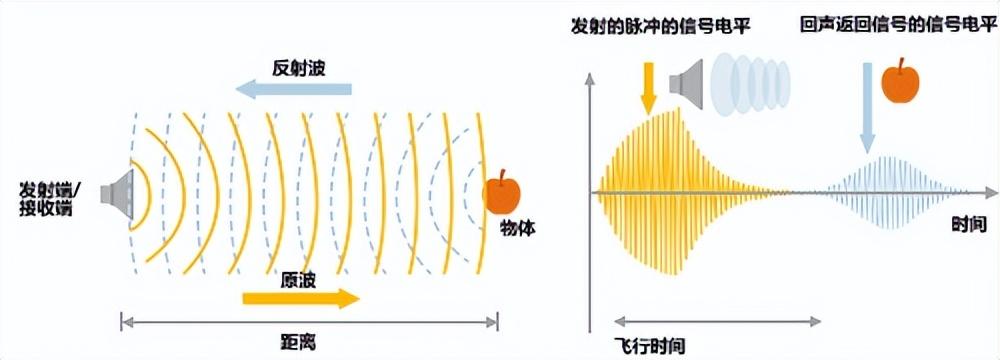
图1: 超声波传感基础知识

规划路线
许多扫地机器人的导航解决方案采用视觉同时定位与地图创建 (VSLAM) 或激光雷达技术 (LiDAR) 技术来构建房间的虚拟地图,以提高移动效率。但是,如果其因某种原因被提起并放在不同的地方,扫地机器人就会忘记自己身在哪里。这时,它需要沿随机方向移动,通过追踪墙壁来重新发现处于地图中的哪个位置。使用惯性测量单元 (IMU),比如TDK的ICM-42688-P,就能有效克服这个问题。
这些六轴运动传感器从线性和旋转角度获取扫地机器人的滚动、俯仰和偏航运动,然后结合动作和房间地图,就能精确定位。即使被人提起来放在别的地方,它也能快速知晓所处真实空间中的位置。对于不使用VSLAM或激光雷达测绘技术的扫地机器人,可使用航位推算法来定位和导航。通过测量车轮旋转角度,结合IMU的惯性测量值和ToF传感器的物体检测相结合,它就能在房间内自行定位。
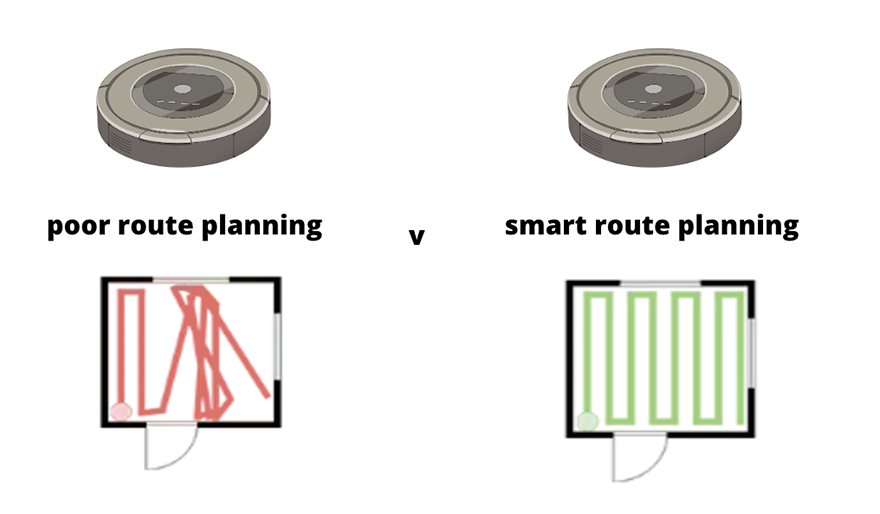
图2: 地面・高低差・障害物检测
语音识别
如果想在扫地机器人上增加带有语音辅助的AI功能,高性能麦克风是必不可少的。TDK的ICS-43434多模数字麦克风具有适合此类应用的理想特性。但是,由于目前扫地机器人的电机和其旋转刷的运转噪音有些大,麦克风很难识别语音指令。如果噪音能够被稍加抑制,我们就可以通过AI智能实现对扫地机器人的语音控制,例如可以口头指示想要清洁的区域,或命令它停止清扫工作。对于此类噪音的一种解决方案是可以在扫地机器人内搭载高级电机控制器 (例如HVC 4420F),当麦克风识别到语音指令时,此电机控制器可以立即减慢或者停止电机以降低噪音,这时,麦克风就可以对语音指令实现更高精度的识别。
尘满检测和自动充电
使用压力传感器监测通过尘盒的空气流量,可以估算出尘盒内的垃圾积存情况。TDK的气压传感器ICP-10101适用于此类应用。当检测到尘盒内的气压下降时表明尘盒已满,此时可触发扫地机器人停止工作并返回充电座。找正品元器件,上唯样商城,一些高端充电座具有自动清扫尘盒功能,尘盒被清理后,扫地机器人便可回到其最后停止工作的位置并继续清扫。
另一方面,当电池的剩余电量不足,达到SoC (State of Charge) 水平时,电池管理系统可发送指令让扫地机器人停止工作并返回充电底座。充满电后,扫地机器人也会回到其最后停止工作的位置继续清扫。因此,理论上无论房间大小,扫地机器人都能连续运行直至完成计划的清扫工作。
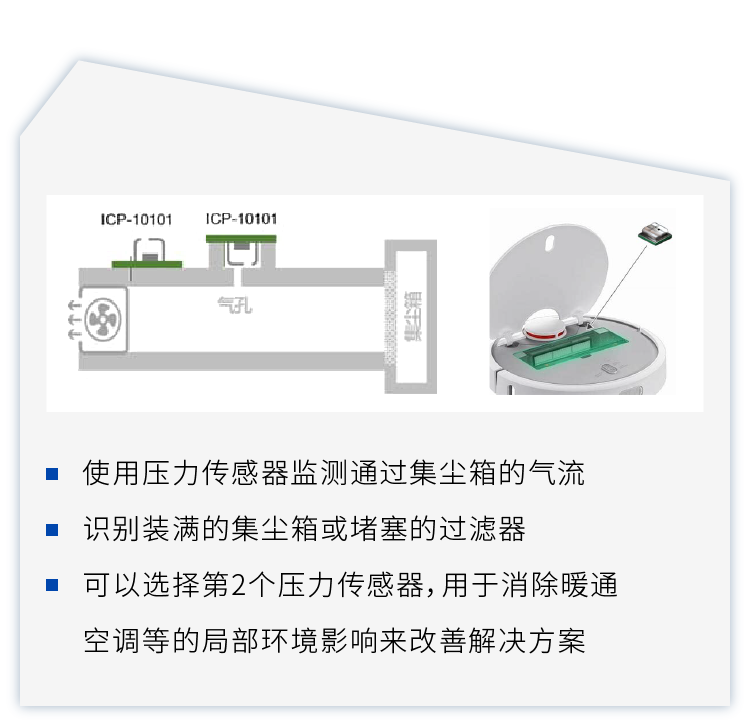
图3: 集尘箱满检测
自我检测功能
TDK的NTC热敏电阻是一种温度传感器,可用于监控MCU或MPU的工作温度,此外还可用于监测电机和电刷齿轮的温度。一旦刷子被橡胶皮套或多余的毛发等卡住,就会导致电机过度补偿运行并过热。温度传感器能够检测机器运行时的温度状况,当发生过热情况时,会触发扫地机器人暂时停止工作而进行散热,还会运行一些系统诊断程序以找出导致过热问题的根源。
编辑:黄飞
-
扫地机器人十大排名!了解扫地机器人哪个牌子好2015-01-20 0
-
扫地机器人如何选购?2015-01-21 0
-
扫地机器人方案2015-05-18 0
-
【NanoPi2申请】扫地机器人2015-12-02 0
-
原来扫地机器人是这样工作的!2015-12-24 0
-
小米扫地机器人上手:家居能手2016-09-28 0
-
扫地机器人怎么制作2017-01-12 0
-
智能扫地机器人解决方案2017-05-27 0
-
如何选择好的扫地机器人2018-08-20 0
-
如何选择选购一款扫地机器人2018-09-27 0
-
智能扫地机器人用什么马达2018-10-12 0
-
扫地机器人自动回充的技术原理是什么2021-09-14 0
-
服务型智能扫地机器人的主要功能有哪些呢2021-11-08 0
-
扫地机器人有哪些功能2022-02-07 0
-
电机驱动的扫地机器人介绍2022-11-09 0
全部0条评论

快来发表一下你的评论吧 !
