

EtherCAT运动控制器在数控加工手轮随动中的应用
描述
本文以正运动技术具备专用手轮接口的运动控制器ZMC408CE为例,介绍手轮、手轮的作用及原理、控制器手轮接口接线以及手轮程序配置。
01 手轮作用及原理
手轮也称手摇脉冲发生器,主要用于数控机床、立体加工中心、卧式加工中心、龙门加工中心等数控设备。当手轮旋转时,编码器产生与手轮运动相对应的信号,通过数控系统选定座标并对座标进行定位。
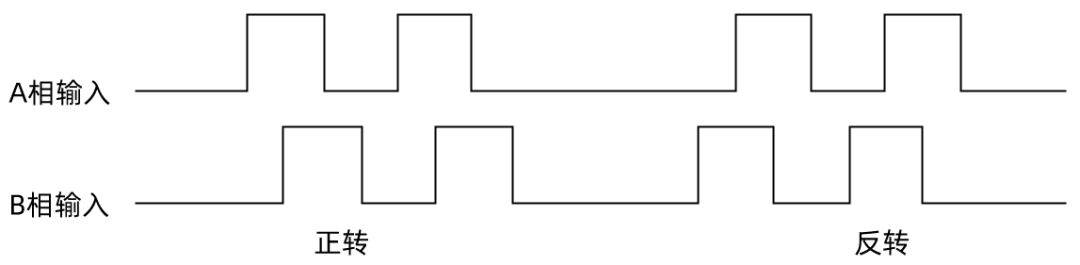
手动脉冲发生器它中心有轴的光电码盘,其上有环形通、暗的刻线,摇动手轮后,由光电发射和接收器件读取,获得2组正弦波信号HA、HB,每个正弦波相差90度相位差。由于HA、HB两信号相差90度,可通过A相在前还是B相在前,给出正转脉冲或反转脉冲去控制伺服电机正转或反转。
02 手轮介绍
1.通过手轮上的“轴选择旋钮”选择需要移动的坐标轴;
2.通过“倍率选择旋钮”选择合适的移动倍(×1/×10/×100);
3.旋转“手轮摇柄”移动坐标轴。顺时针旋转为正向移动,逆时针旋转为负向移动,旋转速度快慢可以控制坐标轴的运动速度;
4.按钮“急停”,紧急停止手轮运动;
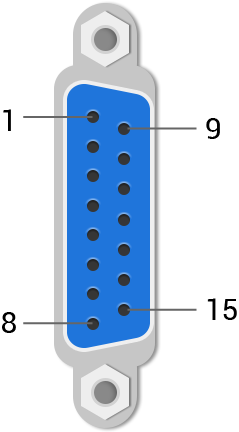
5.控制器手轮接口为双排标准DB15母头,需要手轮接头为双排标准DB15公头。


手轮接口图示
03 控制器手轮接口接线
1.硬件介绍
案例采用ZMC408CE运动控制器,具备专用的手轮接口。
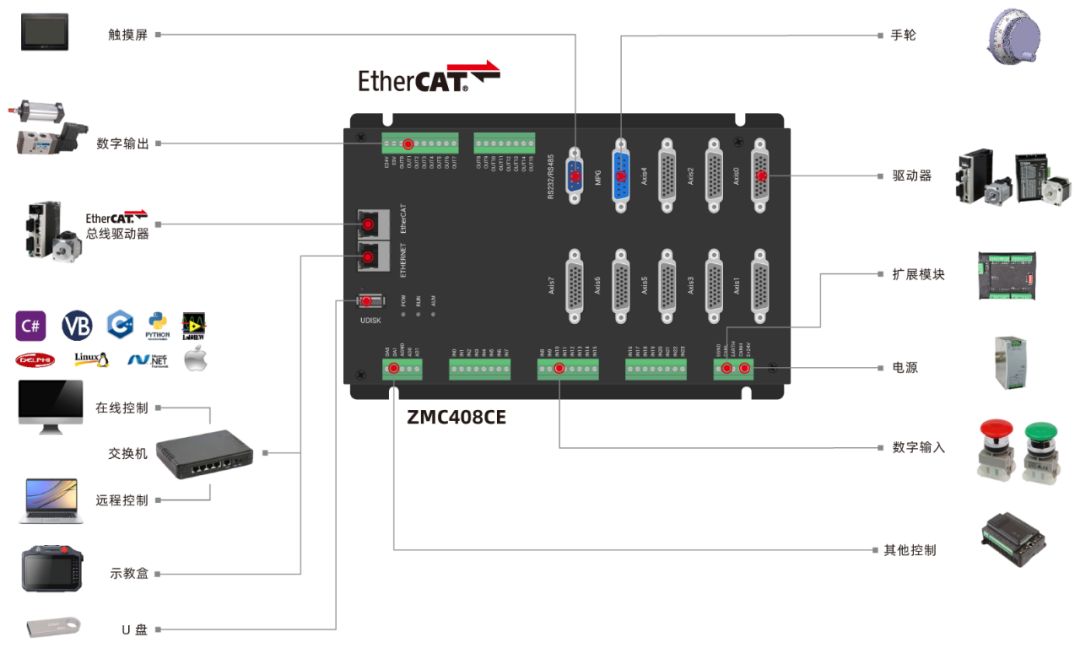
ZMC408CE是正运动技术推出的一款高性能EtherCAT总线运动控制器,核心技术采用了先进的FPGA技术,实现硬件位置比较输出、精准输出功能,保证连续轨迹加工的出色性能和稳定性,以及动态数据捕获的实时性,从而实现更加精准控制和提高生产效率和品质。
ZMC408CE支持EtherCAT总线轴 + 脉冲轴混合插补,可脱机或联机运行,可控电机轴数8轴,特殊型号提供16或32轴可选,支持ZDevelop + 多种高级上位机混合编程,可以实现点位运动、电子凸轮、直线插补、圆弧插补、连续轨迹加工和30+种机器人模型的控制。
ZMC408CE产品亮点
1.高性能处理器,提升运算速度、响应时间和扫描周期等;
2.一维/二维/三维、多通道视觉飞拍,高速高精;
3.位置同步输出PSO,连续轨迹加工中对精密点胶胶量控制和激光能量控制等;
4.多轴同步控制,多坐标系独立控制等;
5.EtherCAT同步周期可快至125us;
6.EtherCAT总线和脉冲轴混合插补;
7.直线插补、任意空间圆弧插补、螺旋插补、样条插补等;
8.应用灵活,可PC上位机开发,也可脱机独立运行;
ZMC408CE视频介绍
2.控制器手轮接口MPG定义
| 接口 | 引脚号 | 信号 | 说明 |
 |
1 | H-5V | 5V电源输出正极,专为手轮供电 |
| 2 | HA- | 编码器A相信号(IN40) | |
| 3 | HB- | 编码器B相信号(IN41) | |
| 4 | HEMGN | 紧急停止信号(IN51) | |
| 5 | NC | 悬空 | |
| 6 | HX1 | 选择X1倍率(IN42) | |
| 7 | HX10 | 选择X10倍率(IN43) | |
| 8 | HX100 | 选择X100倍率(IN44) | |
| 9 | HSU | 轴选3(IN48) | |
| 10 | HSV | 轴选4(IN49) | |
| 11 | EGND | 5V电源输出负极,信号公共端 | |
| 12 | HSW | 轴选5(IN50) | |
| 13 | HSZ | 轴选2(IN47) | |
| 14 | HSY | 轴选1(IN46) | |
| 15 | HSX | 轴选0(IN45) | |
|
注意: 1.5V电源输出仅为手轮供电,切勿为其他设备供电。 2.该接口中的所有信号均为数字输入信号,编号为IN(40-51)。 |
|||
3.手轮接线参考
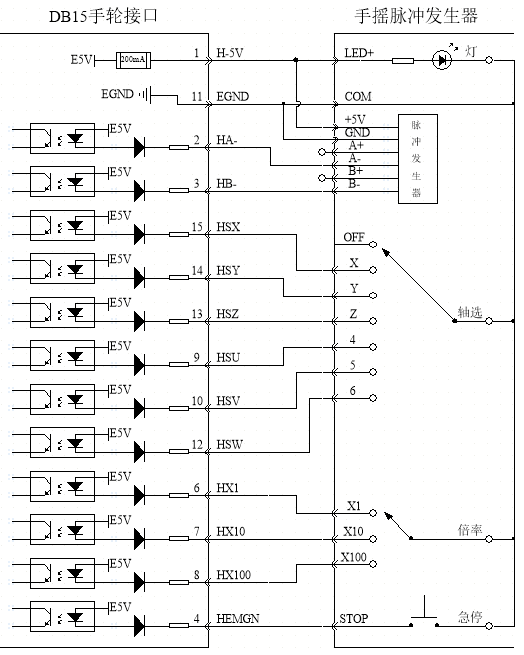
4.注意事项
手轮编码器轴接口接线原理如上图所示,手轮厂家的设计多种多样,请先查看手轮内部的设计图后与运动控制器确认正确后谨慎接线;请使用双绞屏蔽线,尤其是环境恶劣的场合,务必使屏蔽层充分接地。
04 程序配置
1.参考以上手轮接线示意图正确连接手轮和控制器;
2.上电后请选EtherNET、RS232、RS485任一种接口连接ZDevelop;
3.配置轴号:该控制器手轮接口无可用默认AXIS轴号(映射需避开脉冲轴号),必须进行重映射,操作步骤如下:
BASE(目标轴号) '重映射的轴号 ATYPE(目标轴号)=0 '轴类型设为0 BASE(8) '手轮接口初始轴号8(无效的) ATYPE(8)=0 '手轮接口初始轴类型设为0 AXIS_ADDRESS (目标轴号)= (-1<<16)+8 '将初始轴号8绑定到目标轴号 ATYPE(目标轴号)=3 '设置手脉轴轴类型为正交编码器类型
4.配置IO:根据需要赋予轴选(HSX,HSY,HSZ,HSU)和倍率(HX1,HX10,HX100)以及紧急停止(HEMGN)功能;这些信号本质为数字输入信号,有固定的编号(参见上节),但无固定的功能,需要ZDevelop开发;其名称为推荐配置的功能,轴选即为CONNECT同步运动的被连接轴,倍率即CONNECT比率。
5.完成以上配置即可开始使用手轮。
程序示例如下,运行下方程序后,便可实现手轮的控制。
'不同控制器型号,手轮轴号,倍率和轴选择IN编号不一样,参考控制器使用手册,本例程使用控制器型号为ZMC408CE
'不同手轮控制轴数不一样,本例程控制轴数为6个
'轴号设置
global const axis_X = 0 'X轴
global const axis_Y = 1 'Y轴
global const axis_Z = 2 'Z轴
global const axis_U = 3 'U轴
global const axis_V = 4 'V轴
global const axis_W = 5 'W轴
global const def_R = 8 '手轮默认轴号
global const axis_R = 10 '手轮重新映射轴号
'倍率IN编号设置
const io_Handlow = 42 '1倍率
const io_Handmid = 43 '10倍率
const io_Handhigh = 44 '100倍率
'轴选择IN编号设置
const io_HandX = 45 '手轮X轴
const io_HandY = 46 '手轮Y轴
const io_HandZ = 47 '手轮Z轴
const io_HandU = 48 '手轮U轴
const io_HandV = 49 '手轮V轴
const io_HandW = 50 '手轮W轴
'紧急停止信号IN编号设置
const io_HandEMGN = 51 '急停
global dim conflag '手轮连接轴标记
conflag = -1
ATYPE(def_R) = 0 '还原轴 8 轴类型
ATYPE(axis_R) = 0 '还原轴 10 轴类型
AXIS_ADDRESS(axis_R) = (-1<<16)+ def_R '将 MPG 手脉轴地址映射到轴 10
ATYPE(axis_R) = 3 '设置手脉轴轴类型为正交编码器类型
UNITS(axis_R) = 1 '设置手脉轴脉冲当量脉冲为单位
While 1
if in(io_handX) = on then
if in(io_handlow) = on then
connect(1, axis_R) axis(axis_X) '链接到轴X, 倍率 1
elseif in(io_handmid) = on then
connect(10, axis_R) axis(axis_X) '链接到轴X, 倍率 10
elseif in(io_handhigh) = on then
connect(100, axis_R) axis(axis_X) '链接到轴X, 倍率 100
endif
conflag = axis_X
elseif in(io_handY) = on then
if in(io_handlow) = on then
connect(1, axis_R) axis(axis_Y)
elseif in(io_handmid) = on then
connect(10, axis_R) axis(axis_Y)
elseif in(io_handhigh) = on then
connect(100, axis_R) axis(axis_Y)
endif
conflag = axis_Y
elseif in(io_handZ) = on then
if in(io_handlow) = on then
connect(1, axis_R) axis(axis_Z)
elseif in(io_handmid) = on then
connect(10, axis_R) axis(axis_Z)
elseif in(io_handhigh) = on then
connect(100, axis_R) axis(axis_Z)
end if
conflag = axis_Z
elseif in(io_handU) = on then
if in(io_handlow) = on then
connect(1, axis_R) axis(axis_U)
elseif in(io_handmid) = on then
connect(10, axis_R) axis(axis_U)
elseif in(io_handhigh) = on then
connect(100, axis_R) axis(axis_U)
endif
conflag = axis_U
elseif in(io_handV) = on then
if in(io_handlow) = on then
connect(1, axis_R) axis(axis_V)
elseif in(io_handmid) = on then
connect(10, axis_R) axis(axis_V)
elseif in(io_handhigh) = on then
connect(100, axis_R) axis(axis_V)
endif
conflag = axis_V
elseif in(io_handW) = on then
if in(io_handlow) = on then
connect(1, axis_R) axis(axis_W)
elseif in(io_handmid) = on then
connect(10, axis_R) axis(axis_W)
elseif in(io_handhigh) = on then
connect(100, axis_R) axis(axis_W)
endif
conflag = axis_W
elseif conflag <> -1 then '取消连接
cancel(2) axis(conflag)
conflag = -1
elseif in(io_HandEMGN) = off then
RAPIDSTOP(2)
endif
Wend
本次,正运动技术EtherCAT运动控制器在数控加工手轮随动中的应用,就分享到这里。
审核编辑:汤梓红
-
运动控制器在PCB数控钻床中的应用2009-12-09 1003
-
经济型EtherCAT运动控制器:EtherCAT总线快速入门2023-05-11 0
-
运动控制器如何选择2019-09-12 0
-
EtherCAT总线运动控制器硬件是如何进行接线的?2021-07-15 0
-
东莞运动控制器的工作原理及应用2021-08-02 0
-
正运动技术运动控制器EtherCAT总线快速入门2021-09-07 0
-
正运动技术运动控制器EtherCAT总线的基础使用2021-09-27 0
-
CAXA制造工程师在数控加工制造中的应用2009-10-18 5201
-
EtherCAT运动控制器在数控加工手轮随动中的应用2023-05-10 1623
-
EtherCAT运动控制器在数控加工手轮随动中的应用之C++2023-05-18 1604
-
C++调用API函数库接口实现手轮配置2023-05-29 1065
-
全国产EtherCAT运动控制边缘控制器(六):RtBasic文件下载与连续轨迹加工的Python+Qt开发2023-11-02 586
-
EtherCAT运动控制器与PLC的区别2024-06-12 932
-
SSI绝对值编码器在EtherCAT运动控制器中的应用2024-10-09 604
-
伺服电机在数控机床中的使用2024-11-20 345
全部0条评论

快来发表一下你的评论吧 !
