

什么是压电超声波马达?压电超声波马达如何工作?
描述
对于工业应用和未来的航天器来说,改进功能以及减轻重量和尺寸是至关重要的挑战。其中一个难题是马达的尺寸减小。当尺寸减小到几毫米或更小时,常规使用的基于电磁线圈的马达效率会大幅下降。然而,压电超声波马达(piezoelectric ultrasonic motor)的最新进展可能助力解决上述技术难题。当高速和高精度在运动应用中同样重要时,压电超声波马达可以提供显著的优势,其也非常适合尺寸和重量是关键因素的应用,例如无人机或其它无人驾驶飞行器。此外,压电超声波马达的高效率还可以降低能耗和运营成本。
什么是压电超声波马达?
1965年,V.V Lavrinko发明了全球首个压电超声波马达。而第一个具有商业应用价值的压电超声波马达诞生于1982年,由日本的指田年生(Toshiiku Sashida)研制而成。该马达改善了磨损和转换效率低等问题。在常规使用的马达中,电磁场提供驱动力,这是众所周知的。然而,在压电超声波马达中,则利用压电晶体的“逆压电效应(电致伸缩效应)”产生人耳听不见的超声波(频率范围为20 kHz至10 MHz)为马达提供驱动力。压电超声波马达通常由振动件(定子)和运动件(转子)两部分组成,没有绕组、磁体及绝缘结构。压电超声波马达因内部不存在磁场,机械振动频率在可听范围外,因此对外界的电磁干扰和噪声影响很小。
压电超声波马达的内部展示:可见两个提供机械扭矩的压电晶体。
压电超声波马达如何工作?
压电超声波马达的结构形式很多,但基本工作原理相同:对极化后的压电晶体施加一定的高频交变电压,压电晶体随着高频电压的幅值和方向变化而产生膨胀或收缩,从而在定子弹性体内激发出超声波振动,这种振动传递给与定子紧密接触的摩擦材料以驱动转子的旋转。压电超声波马达主要有驻波型和行波型两种。驻波型压电超声波马达的条状压电体具有交替排列的极化区,施加直流电压时产生伸缩交替的变形,收缩部分凸起,伸长部分下凹,整条呈波状。电压极性相反,变形方向随之改变。例如施加交流电压,压电体就随时间作振动变形。此变形是一系列以极化界面为过零点的脉振波,即驻波振动。行波型压电超声波马达由两条相同的压电体相互错开半个极化区长度粘合成一体而成,当分别施加时间上相差90°电角度的交流电压时,两压电体就分别作驻波振动,由弹性体接受的合成振动波是一个随时间前进的行波,即作行波振动。
压电超声波马达与其它马达有何不同?
与传统的电磁马达相比,压电超声波马达的小型结构和适应性设计可实现高扭矩密度(扭矩/重量比)。在某些情况下,压电超声波马达可以直接驱动有效载荷,从而完全不需要齿轮或齿轮系。更重要的是,由于压电材料的优点和转子的低惯性,压电超声波马达可以在几微秒内响应激励。此外,其还可以自锁,具有高保持扭矩并精确调节运动,因此可用于需要高精度的生物医学、高端制造等领域。
此外,压电超声波马达在磁共振成像中非常有用,因为其不产生电磁干扰。压电超声波马达还是航空航天应用(例如太空任务)的首选,因为其可以在极冷或极热的环境中运行。除了上述品质外,压电超声波马达无噪音运行使其成为优先考虑降噪的场所的理想选择。
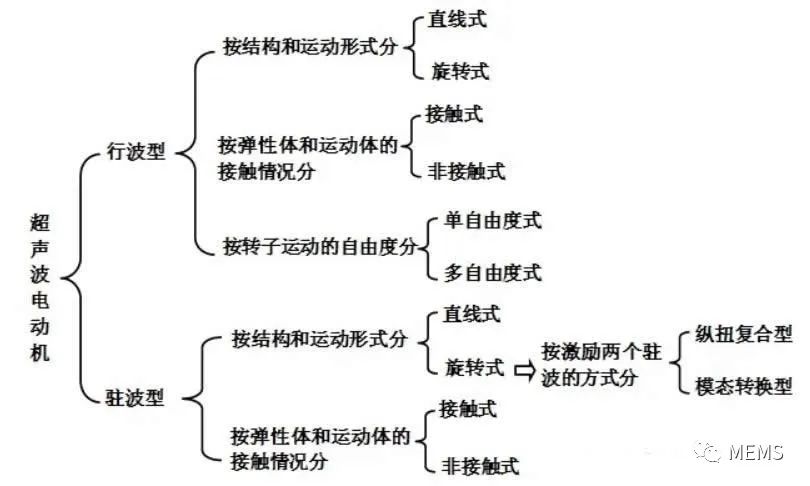
压电超声波马达有哪些不同类型?
如果按照产生运动的超声波类型,压电超声波马达可分为驻波型和行波型;如果按照输出运动类型,可分为线性式和旋转式。行波型与驻波型各有其优缺点:行波型马达优点在于定子表面是产生行波与动子接触,则其接触点是会不断交替的,如此将大大减少压电超声波马达的磨耗问题,然而其也因为行波的缘故,定子上并无节点,所以定子较难固定,除此之外,行波型马达结构较为复杂且效率较低。而驻波型马达结构较为简单,并且效率较高,其最大的缺点是定子与动子间的接触点是唯一的,容易产生磨耗问题。
压电式微马达是有前途的微系统动力源
微马达是自主运动的微系统核心元件,是MEMS研究的重要方向之一。目前,微马达研究领域一方面是优化现有结构,以提高输出特性;另一方面是探索新材料、新结构。微马达的研究已在静电式、电磁式和压电式三个方向取得了一定的进展。其中,静电式微马达产生的力矩较小,难以应用;电磁式微电机利用精密机械加工或MEMS工艺,实现部分组件微型化,已在毫米级电机研制中取得较大进展,但进一步微型化面临困难;压电式微马达利用摩擦力驱动转子,尺寸效应的负面影响较小,易于微型化和集成,可能成为有前途的微系统动力源。
审核编辑:刘清
-
超声波电机是什么?2020-11-16 0
-
超声波马达的特点2020-11-17 0
-
环形超声波马达与微型超声波马达的区别对比2020-11-26 0
-
超声波马达的优势有哪些2021-09-10 0
-
超声波马达的原理和作用2021-09-17 0
-
超声波马达是什么_超声波马达原理2020-04-14 17227
-
超声波马达的工作原理以及超声波马达的优点是什么2020-10-23 4855
-
超声波马达到底是什么2020-11-04 1161
-
超声波马达是什么,其基本工作原理是怎样的2020-11-04 7233
-
什么是超声波电机,它的工作原理是什么2020-11-16 11592
-
环形超声波马达与微型超声波马达之间的区别是什么2020-11-27 2181
-
环形超声波马达和微型超声波马达到底有什么区别2020-12-11 960
-
环形超声波马达和微型超声波马达之间的区别是什么2020-12-11 3594
-
超声波压电马达到底是什么2020-12-29 1006
-
镜头超声波马达的工作原理综述2021-06-19 1515
全部0条评论

快来发表一下你的评论吧 !
