

基于图案化水凝胶材料的多功能仿生电子皮肤
描述
电子皮肤类似于人体皮肤,它可以感知外界刺激获取环境信息,并将其转化为电信号,这项技术在软体机器人、假肢设计和可穿戴设备等领域备受关注。随着新型可穿戴电子设备和人机交互界面系统的迅猛发展,对电子皮肤的要求也越来越高。然而,目前仍存在一些挑战,如传感灵敏度、功能单一、稳定性和环境适用性等方面的限制,阻碍了其广泛应用。为了克服这些挑战,结合微纳加工工艺和摩擦纳米发电技术,可以提升传感器的灵敏度和环境适用性,同时实现智能电子皮肤和人机交互界面等功能,从而实现其更广泛的应用。
摘要
西北工业大学苑伟政教授团队/北京大学张海霞教授团队提出了一种高灵敏多功能水凝胶基仿生电子皮肤(BHES)。通过利用不同材料在接触起电过程中的得失电子能力差异,该电子皮肤可以准确地识别材料,并且借助粘滑现象实现对材料纹理/粗糙度的识别。基于微纳加工工艺制备了微针图案化的水凝胶,使得电子皮肤具备了高灵敏度(17.32 mV/Pa)、宽压力范围(20-5000 Pa)、低检测限和快速响应(10 ms)/恢复(17 ms)的压力传感功能。通过结合深度学习技术,BHES实现了高精度的材料识别(对于10种材料的识别准确率为95.00%)和纹理识别(对于4种粗糙度的识别准确率为97.20%),并通过独立的传感通道最大限度地减少了应力引起的干扰。基于BHES设计了一种可穿戴式无人机控制系统,结合信号采集和处理威廉希尔官方网站 ,使用户能够通过手势操控四旋翼无人机进行三自由度运动,并且控制无人机编队运动。这项技术在软体机器人、数字孪生和自供电人机交互界面等领域展示出巨大的潜力。该研究成果以“Deep-Learning Enabled Active Biomimetic Multifunctional Hydrogel Electronic Skin”为题发表在国际著名期刊《ACS Nano》上,西北工业大学陶凯研究员为第一作者,西北工业大学苑伟政教授和北京大学张海霞教授为共同通讯作者。
在这项研究中,作者提出了一种基于图案化水凝胶材料的多功能仿生电子皮肤,如图1所示,该电子皮肤具备高灵敏度压力传感、高准确率材料种类以及表面粗糙度识别等多种功能。结合信号采集/处理威廉希尔官方网站 ,可以通过该电子皮肤对人的手势进行检测,并用于进行无人机的三自由度运动操控以及无人机群的运动控制(图1)。
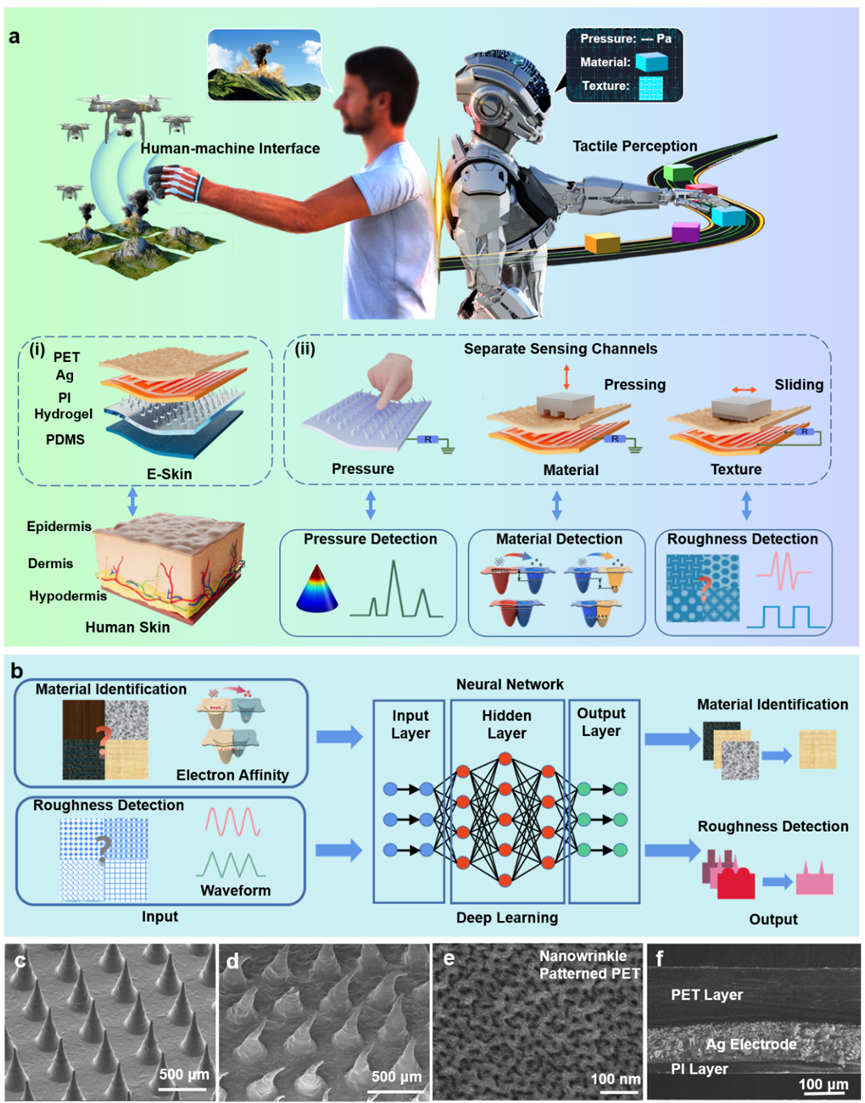
图1:图案化水凝胶基仿生电子皮肤(BHES)整体结构设计
作者在传统双网络水凝胶中引入LiBr溶液,利用离子水合作用极大改善了其抗干燥以及耐低温性能,拓宽了其适用温度范围。此外,设计的水凝胶还具备较高的透明度、电学稳定性以及作为人体运动传感器等优异性能(图2)。
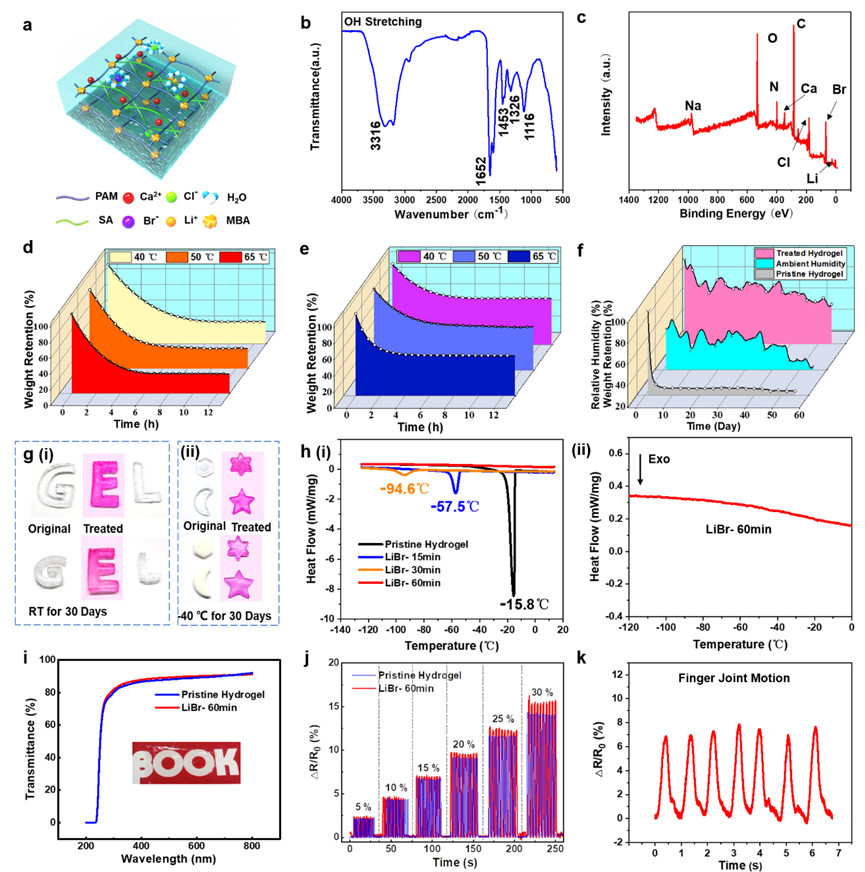
图2:双网络结构离子水凝胶的性能表征
在该项研究中,首先通过仿真与计算优化微结构设计,并通过微纳加工工艺制备了表面带有微针结构的水凝胶材料,使得器件的压力传感灵敏度由8.86 mV/Pa提高到了17.32 mV/Pa。此外,设计的电子皮肤还具备微小物体检测和快速响应(10 ms)/恢复(17 ms)的特性(图3)。
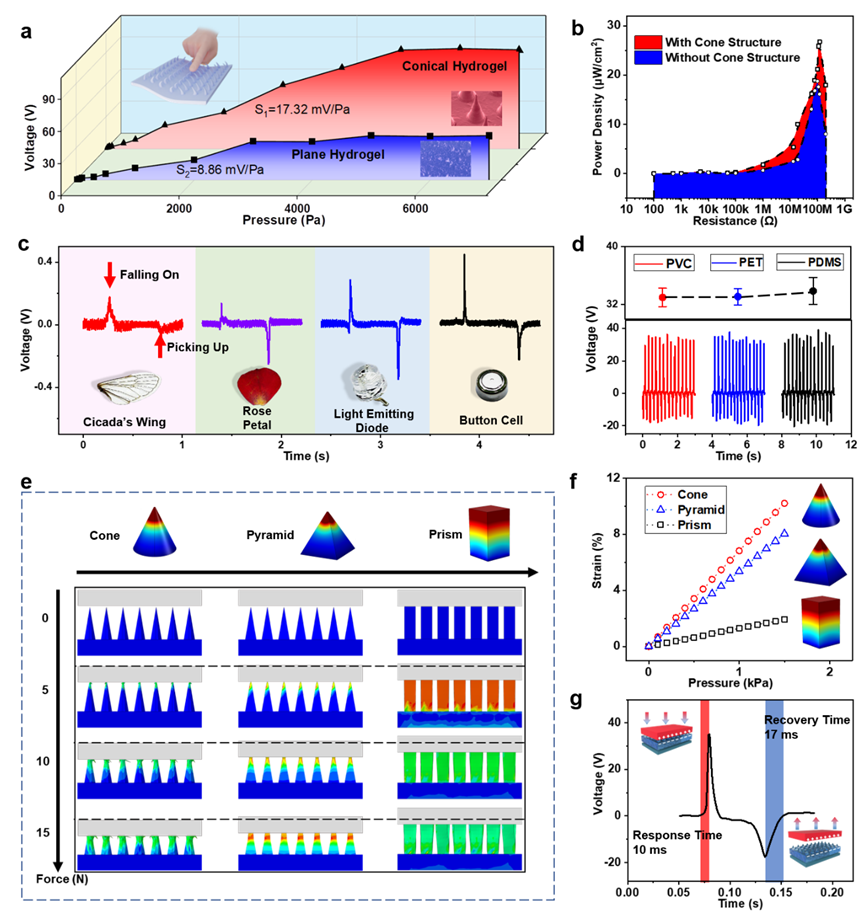
图3:BHES的压力传感应用展示
研究者基于不同材料在接触起电过程中的得失电子能力差异这一机理,设计的电子皮肤可以准确地识别材料种类,同时借助粘滑现象实现对材料纹理/粗糙度的识别。利用深度学习技术,实现了对10种常用工程材料的准确识别(识别准确率为95.00%)以及对4种不同粗糙度碳钢材料的准确识别(识别准确率为97.20%)(图4)。
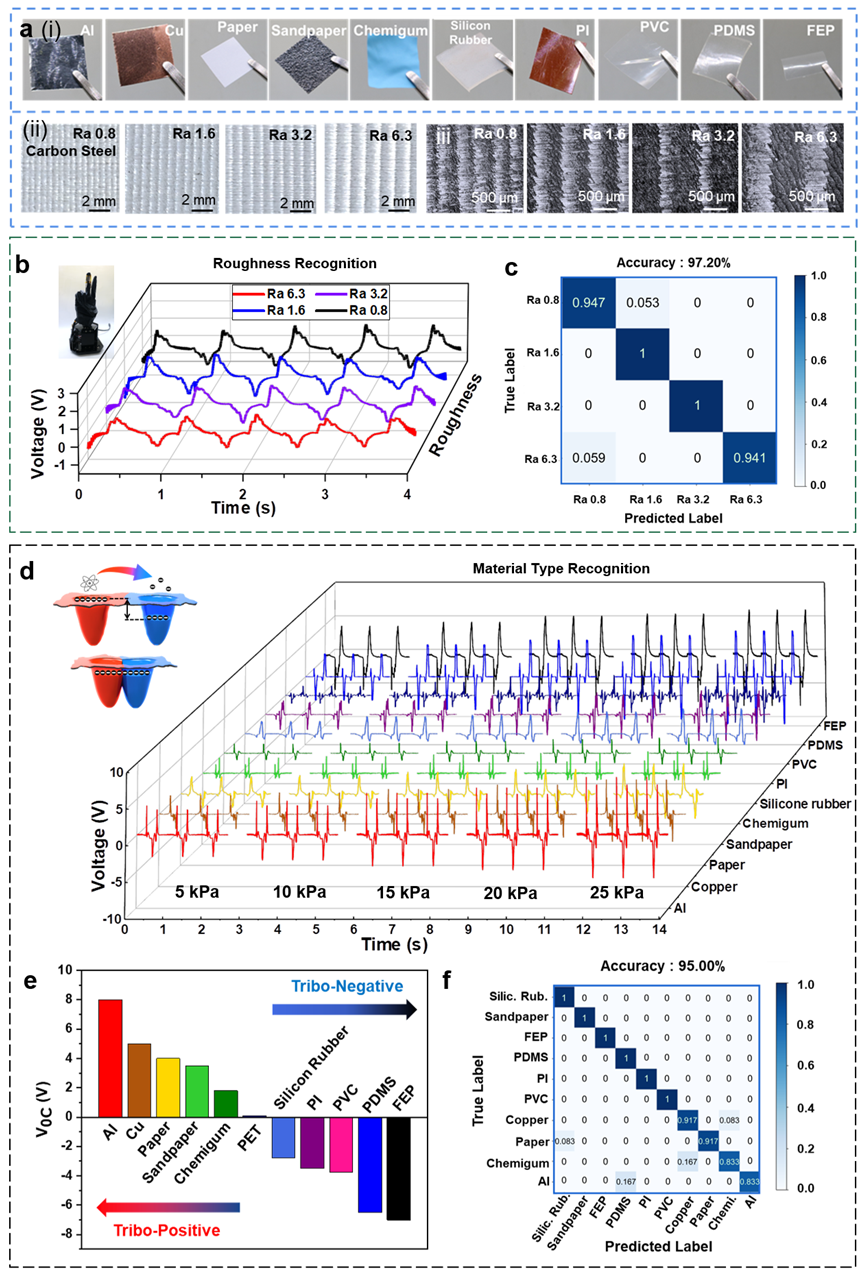
图4:BHES的材料识别应用展示
研究者基于BEHS,结合信号采集/处理威廉希尔官方网站 ,设计了一套可穿戴式无人机控制系统,实现了利用人体手势对四旋翼无人机的三自由度运动控制以及对无人机群的控制演示,有望在环境保护以及山林防灾等场景中进行使用(图5)。
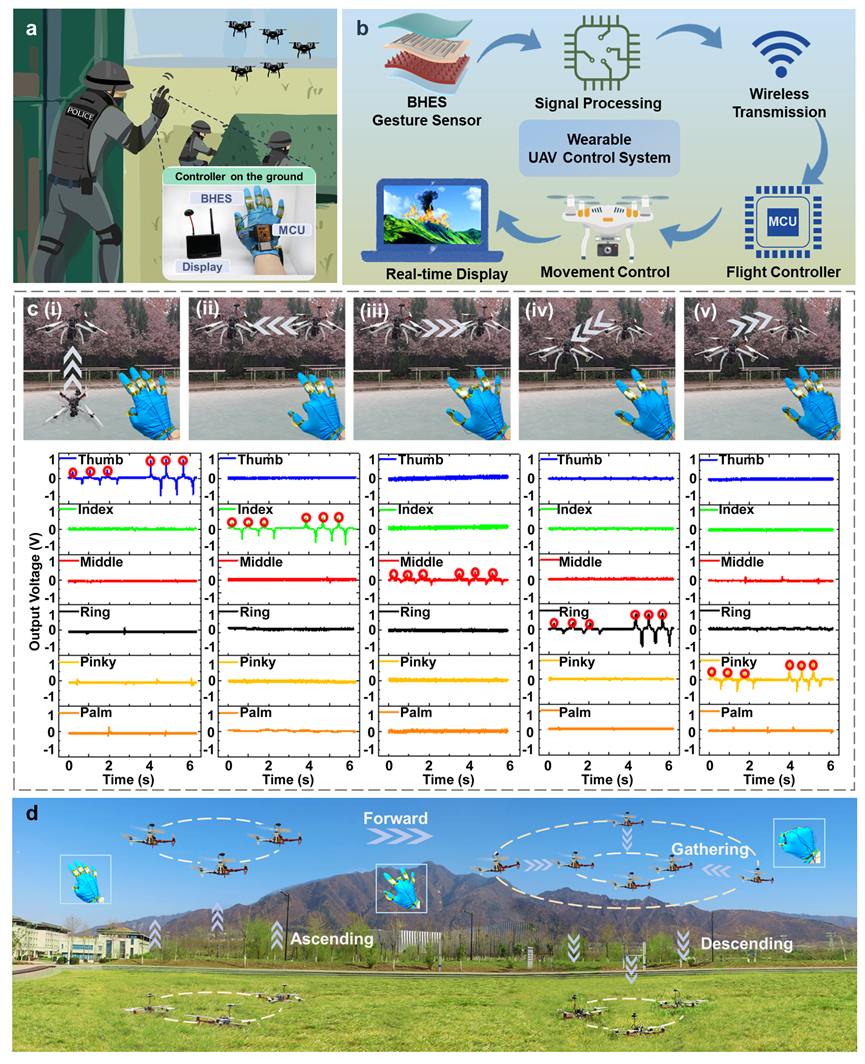
图5:基于BHES的无人机控制系统展示
结论
在本研究中,基于纳米褶皱图案化PET和微针图案化双网络水凝胶,提出了一种仿皮肤结构的超灵敏多功能电子皮肤。为模仿表皮层表面并更好地利用摩擦起电机制,引入了纳米褶皱图案化PET。同时采用微针图案化水凝胶作为摩擦层和导电电极,以提高器件的灵敏度。所设计的水凝胶显示出卓越的抗干燥和耐低温能力、优异的透明度和较高电学输出稳定性。在作为压力传感器时,BHES可在相对较宽的压力范围(20-5000Pa)内具有高灵敏度(17.32mV/Pa)、低检测限和超快响应(10ms)/恢复(17ms)速度。多功能电子皮肤同时可赋予机器人材料识别和纹理识别的能力。借助深度学习技术,它可以准确地识别10种常用工程材料和4种不同粗糙度的碳钢材料,识别准确率分别可达到95.00%和97.20%。通过进一步结合信号采集/处理威廉希尔官方网站 ,该电子皮肤可通过检测人体手势来控制无人机的运动,成功应用于人机交互界面系统。这项研究为智能机器人在数字孪生和元宇宙领域的应用提供了新的思路,并展示出在自供能人机交互界面领域的应用潜力。
审核编辑:彭菁
-
水凝胶的介绍和生物医用高强度水凝胶的力学强度分析2017-09-19 2103
-
西安交大研究出一种可注射水凝胶敷料,可用于治疗皮肤损伤2018-09-04 5699
-
基于高强度导电水凝胶的线性高灵敏度应变传感器2018-10-25 9356
-
近年来仿生各向异性水凝胶驱动器相关研究的最新进展2018-12-31 7220
-
基于可食用摩擦电水凝胶传感器网络的婴儿智能监护系统2022-07-12 906
-
4D打印MXene水凝胶助力赝电容储能2022-11-17 1006
-
多功能水凝胶传感界面,实现脑电信号高质量无创采集2023-02-06 1380
-
天津科技大学:研发细菌纤维素水凝胶及其应用柔性传感器2023-03-01 782
-
北京林业大学:研究多功能MXene导电两性离子水凝胶应用于柔性可穿戴传感器阵列2023-05-19 1143
-
剑桥大学开发出具有触觉感应功能的新型水凝胶皮肤2023-07-09 622
-
用于可穿戴无人机控制系统的仿生多功能水凝胶基电子皮肤2023-08-21 1315
-
用于皮肤组织再生和电子皮肤的仿生材料研究进展综述2024-05-14 825
-
水凝胶半导体材料问世,有望用于生物集成威廉希尔官方网站2024-10-29 276
全部0条评论

快来发表一下你的评论吧 !
