

位置传感器及编码器关键术语,如何选择合适的位置传感器
描述
传感器广泛用于自动化和测量应用中。选择合适的传感器的关键步骤是了解传感器尺寸,分辨率,可重复性,精度,安装约束和环境坚固性的要求。
位置传感器关键术语
增量式传感器
仅提供位置更改信息,以便在启动时实际位置未知。每转一次索引/标记信号定义设备的零位或零位。在归航程序中检测到。对于无刷电机的换相,电机通常有三个磁性霍尔传感器,为磁场的初步对准提供粗略的绝对位置信息。增量传感器通常体积小、精度高、性价比高。
绝对传感器
提供一转内或线性行程范围内的实际物理位置。电机不需要霍尔,只有在运动范围超过一转的情况下,才需要对旋转应用进行归位。传感器通常比增量设备更大,更昂贵。
多转
旋转设备,传感器可提供多转的实际位置。可以完全消除归航。多回转设备具有内部齿轮装置,是最庞大,最昂贵的解决方案。
分辨率
定义可以移动或测量的最小位置增量,通常以“计数”表示。高性能伺服系统需要高分辨率。定位系统在两个计数之间“抖动”,因此分辨率越高,抖动越小。分辨率对低速时的速度波动也有重大影响。由于速度是从位置反馈中得出的,因此,如果分辨率较低,则样本中的数据可能不足以准确得出速度。在高速下,高分辨率设备可以生成超出控制器或伺服驱动器跟踪能力的数据速率。
插值
可以看出,许多传感器都会产生正弦和余弦信号。这些信号的周期由设备固有的“螺距”定义。利用sin/cos信息,理论上可以通过计算信号比率来获得无限分辨率。此技术称为插值。实际上,sin/cos信号的保真度和信噪比限制了可实现的分辨率。
准确性
定义每个测量位置与实际物理位置的距离。精度在很大程度上是系统问题,并且可能会受到偏心率,直线度和平面度等机械误差的影响。传感器误差包括基音(线性)的非累积随机变化,基音误差(斜率)的累积以及内部sin/cos信号保真度的变化。精密机器制造商通常通过偏移量查找表来校准误差。
重复性
定义当系统多次返回相同的物理位置时的测量位置范围。可重复性比绝对精度更重要。为了有效地校准系统误差,使每个位置读数保持一致很重要。传感器迟滞(不同的读数取决于测量位置的接近方向)是可重复性的重要因素。
模块化
旋转反馈装置的最常见形式被封装在带有内部轴承的外壳和通过柔性联轴器连接到电机的轴上。外壳有一系列的密封等级,体积庞大模块化装置没有外壳或轴承,必须内置在机械系统中。它们明显更紧凑,但可能需要一个更友好的环境,这取决于技术。
开/关轴
对于旋转应用,传感器典型地位于围绕旋转轴线的秤的圆周上的离轴。当径向空间受到约束时,一些实现将传感器定位在轴最小化的尺寸上。
电位器
尽管非接触式传感器有发展趋势,但电位计(“电位器”)仍广泛用于低端应用中。电位计测量触点沿电阻轨道滑动时的电压降。它们有旋转,线性或曲线形式,通常紧凑而轻便。一个简单的设备将花费几分钱,而更高精度的设备则可能花费200美元以上。通过激光修整电阻轨迹,可以使线性度小于0.01%。
电位器最适合在良性环境中具有低占空比的低性能应用中使用。它们易受磨损和灰尘或沙粒等异物的影响。电位计理论上具有无限分辨率,但实际上分辨率仅限于模数转换器(ADC)接口和整个噪声环境。
优点:低成本;简单;紧凑;轻便。可以做到准确
弱点:磨损;振动;污染,极端温度。
光学编码器–透射式
位置传感器-透射式光学编码器
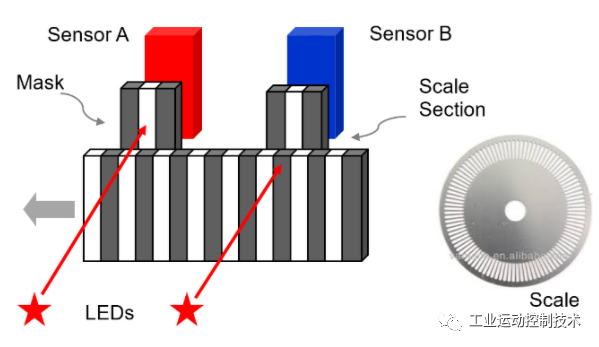
透射编码器使用由LED光源照明的细光栅或“标尺”的光学扫描。旋转或线性刻度尺由透明和不透明的“线”制成,它们以50至50的占空比排列。光盘上透明区域的数量与比例尺间距相对应,比例尺间距定义了编码器的分辨率。
传感器产生与入射光强度成比例的电压。当传感器相对于刻度移动时,电压呈正弦变化。将第二个光检测器异相添加90°。这涉及一半刻度线的位移。来自传感器A的信号是否领先传感器B或反之亦然,它定义了相对运动的方向。编码器输出可以是正弦/余弦信号,但信号通常会转换为方波:四边形B(四边形与90°相移有关)。控制器检测每个方波边缘上的过渡,从而将编码器分辨率有效提高4倍。
与每条线的宽度相比,检测器往往更大。在较高的分辨率下,这可能导致通道之间的溢出。添加与通道模式匹配的遮罩有助于清理信号。这种设计的权衡之处在于,标尺和传感器之间的气隙必须非常小,对圆盘参数(例如平整度,偏心率和对准)施加严格的规范,使设备更容易受到冲击和振动。
相控阵增量式编码器使用固态技术来提供更强大的解决方案。相控阵编码器不是每个通道的离散检测器,而是具有检测器阵列,因此每个通道都被多个检测器覆盖。这种方法可以平均光信号,从而最大程度地减少由制造误差(例如光盘偏心率和未对准)引起的变化,在降低制造公差的同时提高性能。
编码器本质上是增量式的,通常具有一条带有单个透明线和独立传感器的附加刻度轨道。传感器生成一个索引信号,定义设备的空位置。透射编码器的绝对版本包含多个轨迹,光源和传感器,它们完全确定了旋转中的位置。通过将一个圆盘机械传动到第二个圆盘,可以定义多转的位置。
优点:中等分辨率;准确性好;高重复性,划算的。
弱点:笨重;模块化设备的环境坚固性。
光学编码器–反射式
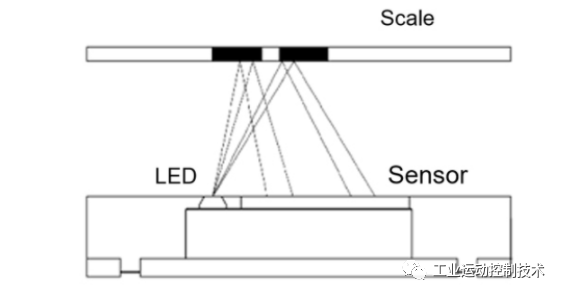
反射光学编码器的原理与透射编码器非常相似。反射式编码器通过从与传感器相同的一侧(相对于代码盘)发射光,并有选择地将光的一部分反射到传感器来工作。减小物理尺寸是该解决方案的明显优势。无需透射式编码器中通常需要的准直光学器件,并且LED光源与传感器在同一侧,可以大大减少编码器的总体积。分辨率和精度通常不如透射编码器。
优点:中等分辨率和准确性,高重复性;成本效益高
弱点:环境坚固性
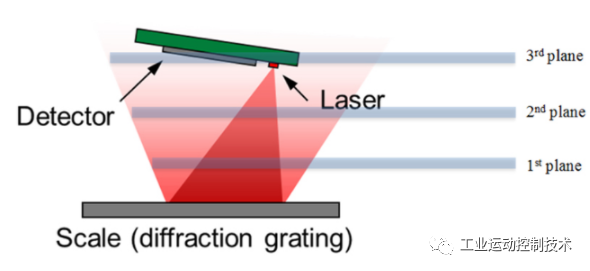
一个相干激光源产生发散光束,该发散光束照亮印在标尺上的衍射光栅图案。使用玻璃刻度尺上的铬沉积或金属胶带刻度尺上的激光写入线来创建光栅图案。20μm的节距光栅使光发生衍射,从而产生高对比度的明暗干涉图样,直接回到检测器阵列上。本质上是增量地,通常提供第二索引/标记轨道。
衍射光会产生离散的Talbot平面干涉图。在3以上的例子RD塔尔博特平面被利用。随着标尺和检测器的相对位置发生变化,衍射图样会在检测器阵列上平移,从而导致每个检测器单元中出现正弦变化。
干扰技术需要最少的光学组件,从而可实现小尺寸传感器。在没有插值的情况下,分辨率通常比透射或反射式光学编码器高出多个数量级。由于正弦和余弦信号的保真度,可以进行高插值,从而以高精度产生纳米分辨率。考虑到设备的精度,对对准公差的要求不是很高。
此类编码器需要清洁的环境。采用相干性较低的LED光源,并与准直和滤波光学器件相结合,可显着提高抗污染能力。编码器不可避免地更大,并且通常具有更严格的对齐公差。有关更多详细信息,
优点:高分辨率,准确性,可重复性;紧凑;适中的对准公差
弱点:Talbot飞机实施的环境坚固性。
光学编码器的绝对技术
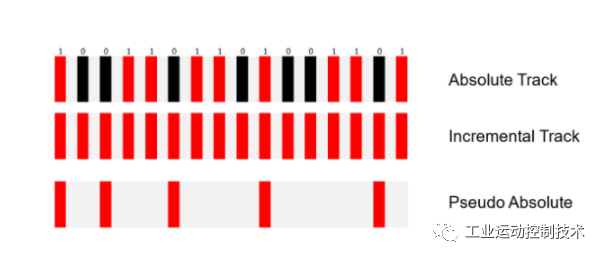
上面显示的绝对比例具有类似于条形码的多个代码。代码位数确定唯一代码的数量,从而确定刻度尺的最大长度或周长。照相机捕获代码,随后的处理确定绝对位置。此技术会增加等待时间(获得阅读的时间)。某些编码器在初始绝对读数后恢复为增量轨道,以减少延迟。
条形码技术可能很昂贵。更具成本效益的解决方案采用了实质上是多个索引的方法。如在增量磁道上看到的那样,每对索引由唯一数量的行分隔。在启动时,有必要引起运动,以便检测到两个索引。在此过程中,将对增量轨道上的行数进行计数。使用查找表可以确定绝对位置。缺点是在确定绝对位置之前需要移动。
优点:良好的分辨率,准确性,可重复性;适中的对准公差
弱点:环境坚固性;对于真正的绝对来说可能会很昂贵。
磁性编码器
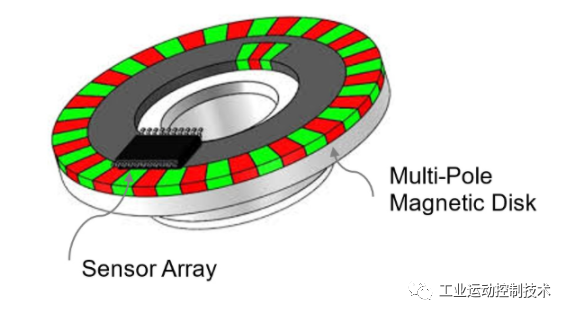
磁编码器采用多极磁道。当磁极相对于传感器移动时,传感器(霍尔效应或磁阻传感器)测量磁通量的变化。可以像在光学编码器中一样生成正弦和余弦信号。
磁阻电阻器由诸如镍铁的磁敏合金形成。外部磁场会对材料的磁畴施加压力,从而改变电阻。磁阻传感器由光刻图案化的薄膜电阻器阵列组成。当转子磁极经过传感器阵列时,电阻呈正弦变化。
霍尔传感器由连接至电源的一层半导体材料(通常为p型)组成。施加的磁场在电荷载流子上施加一个力(洛伦兹力),使它们分开以产生电势差。霍尔传感器产生的电压取决于磁场垂直分量的强度。
该设备本质上是增量式的,上面的插图显示了用于定义空位置的索引轨道。可以添加第二个传感器和磁极数不同的磁道。来自每个轨道的读数的组合用于确定绝对位置。
电磁编码器坚固耐用,结构紧凑并且非常经济。但是,它们容易受到磁场的影响,并且在附近的传感器之间可能会发生串扰。很难产生细间距的磁道限制分辨率。在工作温度范围内,磁滞和精度变化会损害可重复性。磁道比较脆,容易受到冲击。
优点:强大的;紧凑;耐受液体和非金属污染物;同轴版本
弱点:温度;磁滞易受磁场影响;耐冲击/冲击。
电容编码器
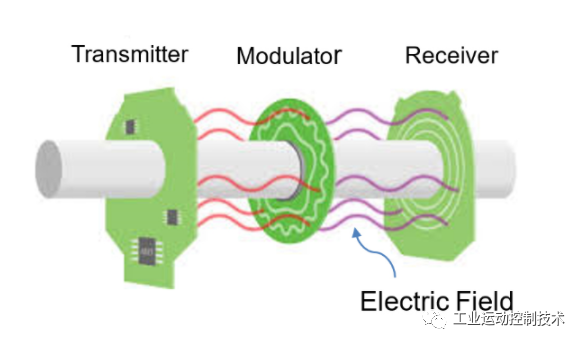
电容式编码器基于以下原理:电容与两个带电板之间的辩证材料成正比。如图所示,在电容耦合的发射器和接收器之间会产生电场。转子以正弦形式调制电介质ԑ,从而引起电容变化。电容的变化又调制了发射器和接收器之间的电势差。采用多个调制轨道来定义绝对位置。
电容式编码器结构紧凑,功耗极低。但是,它们易于凝结和静电积聚。电容也会随温度,湿度,周围材料和异物而变化,这使得工程稳定,高精度的位置传感器面临挑战。设备的组件有很小的气隙,需要仔细安装。
优点:紧凑;低功率。
弱点:环境坚固性;对齐公差。
解析器
旋转变压器基于电磁感应原理,一根导体中的交流电会在导体周围产生变化的磁场。该磁场可在相邻导体中感应出交流电。从一个导体到另一导体的耦合的大小取决于磁场的变化率以及导体的相对位置和几何形状。
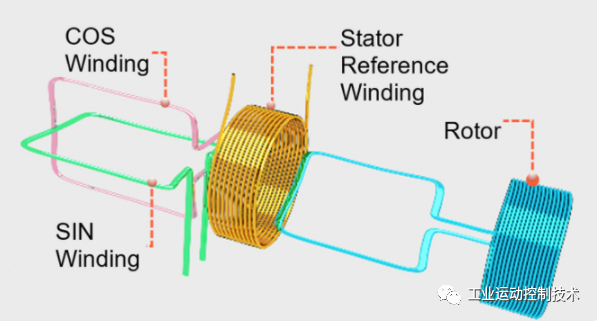
如下图所示,定子中的5kHz(典型值)正弦参考电压会在转子绕组中感应出正弦电压。然后,第二个轴向转子绕组在两个轴向信号绕组中感应出一个电压,这些信号绕组在定子上向后偏移90º。如图所示,耦合到定子绕组中的量是转子相对位置的函数,转子有效地对定子信号进行幅度调制。
为了清楚起见,在上面的图示中,转子显示在定子外部。定子上的径向绕组仅与转子上的径向绕组相互作用。进而,转子上的轴向绕组仅与定子上的轴向绕组相互作用。这是为了避免定子参考绕组耦合到定子信号绕组。缠绕旋转变压器并非易事,最终结果是设备笨重。但是,旋转变压器确实具有无与伦比的坚固性,因为设备中没有电子设备或易碎部件。
旋转变压器有多种“速度”可供选择。单速旋转变压器每转具有一个电正弦波周期,并以有限的分辨率提供绝对位置信息。每转可卷绕“多速旋转变压器”,以获得更高的电循环次数,从而提高分辨率。电气循环与机械循环的比率较高,也有助于最小化机械误差源的影响。多速旋转变压器不再是绝对的,而且价格更高,而且通常更笨重。
优点:中等分辨率和准确性;可靠;极其坚固
弱点:昂贵;笨重;重。
感应编码器
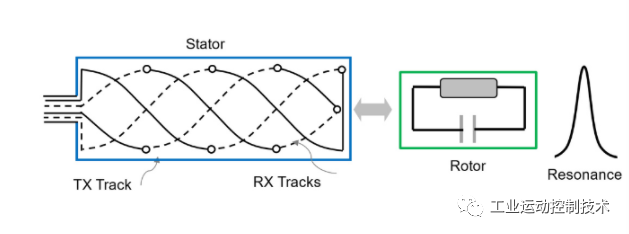
绝对感应编码器基于与分解器相同的电磁感应原理,但使用PCB走线而不是线圈绕组。定子上的TX磁道被1-10MHz范围内的特定频率激励。该信号通过谐振LC威廉希尔官方网站 感应耦合到目标中。目标磁场在定子RX磁道中感应出正弦电流。RX轨道为正弦曲线形状,可有效地幅度调制感应信号。第二个RX轨道偏移90º,则承载余弦信号。正弦/余弦信号被插值并输出为BiSS-C,SSI或某些版本的AqB信号。
定子上的RX轨迹类似于双绞线。平衡偶极效应抵消了TX轨道上变化的磁场在RX轨道中感应的电场。RX轨道仅响应目标上变化的磁场。RX轨道还可以抑制外部电磁干扰。还会根据频率和相位拒绝不希望的感应定子电流。
每转具有一个sin/cos周期的主要RX磁道定义了绝对位置。具有多个循环的辅助轨道可提高分辨率。更典型的是,主TX轨迹具有多个周期(例如9个),而辅助轨迹则具有多个周期,而不是3的倍数–一个转速内的每个位置都由两个唯一的读数定义。
使用PCB走线与旋转变压器绕组相比具有明显的优势,包括:降低成本,尺寸和重量;形状灵活性,包括曲线;消除缠绕过程中的误差;对于安全相关应用,可以使用多层威廉希尔官方网站 板将多个传感器放置在同一空间中。
PCB材料在环境上非常稳定。远程电子设备的选件进一步提高了耐用性。360º传感器提高了偏心误差容限。
优点:中等精度和分辨率;可靠;强大的;多种几何形状;紧凑;轻巧的
弱点:典型的最小直径是37毫米。
位置传感器–技术比较
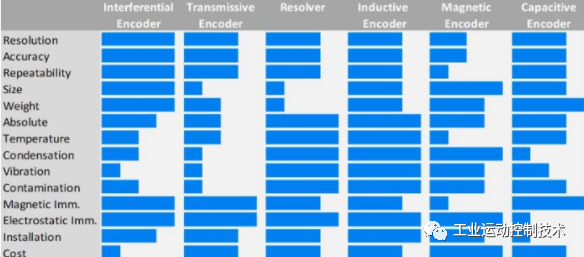
位置传感器/位置反馈设备的比较如下所示。反射编码器可以被认为类似于透射编码器。电位器属于接触设备,因此不包括在内。
位置传感器的技术比较
最终目标是找到满足精度,尺寸和耐用性要求的最具成本效益的解决方案。从上表中可以看出两点:在精度和尺寸方面,干涉编码器无疑是领先者;旋转变压器和电感式编码器具有环境坚固性和中等精度的优势。如上所述,与旋转变压器相比,电感式编码器具有许多优势,特别是尺寸和重量。
-
什么是位置传感器?#传感器硬创客 2021-09-27
-
拉线位移编码器_传感器选型技巧2020-08-11 0
-
关于位置传感器细节设计的分析教程2020-12-11 0
-
曲轴位置传感器和凸轮轴位置传感器的工作原理与检测2017-08-23 4205
-
位置传感器结构案例编码2019-06-26 3855
-
位置传感器原理及应用2019-09-30 23031
-
位置传感器关键术语,如何选择合适的位置传感器2020-12-03 1499
-
什么是位置传感器,它的分类都有哪些2021-07-01 9680
-
关于位置传感器的那些术语,你知道多少呢2021-07-01 916
-
如何选择合适的传感器 传感器选择指南2022-02-26 7895
-
位置传感器简介及类型说明2022-04-19 7529
-
位置传感器的工作原理及类型2022-09-07 6164
-
安森美推出电感型位置传感器,可替代光学编码器2022-12-08 4821
-
曲轴位置传感器及凸轮轴位置传感器常见故障及检测2023-01-29 3431
-
为什么AMR传感器是高精度位置测量的绝佳选择2023-02-15 2264
全部0条评论

快来发表一下你的评论吧 !
