

利用CMUT面阵进行非接触式三维超声反射成像
描述
与传统工艺制作的压电块体型超声换能器相比,电容式微机械超声换能器(CMUT)具有阻抗匹配特性良好、带宽大、体积小等优势,在医学超声成像和无损检测方面得到了广泛应用。三维超声反射成像通常需要利用CMUT线阵的机械移动实现对被测物的多维度扫描,但这一方法往往难以实现较小距离的移动,并且存在一定的误差。利用CMUT面阵对被测物进行扫描可以同时获取多维度的超声反射信号,从而减少测试工作量,并且能够准确获取被测物的三维信息。然而,目前国内关于利用CMUT面阵进行非接触式三维超声反射成像的研究鲜有报道。
据麦姆斯咨询报道,为了解决上述挑战,来自中北大学的研究人员提出了利用基于16 × 4阵元的CMUT面阵进行B模式及二次谐波三维成像测试的方法,以得到伪影水平更低、重建偏差更小的超声反射图像。相关研究成果以“基于16 × 4阵元CMUT面阵的三维超声反射成像”为题发表在《微纳电子技术》期刊上。
CMUT面阵的制备及工作原理
研究人员分别利用绝缘体上硅(SOI)和二氧化硅(SiO₂)晶圆制备了CMUT振动薄膜和真空腔,并且在真空环境中通过晶圆键合形成CMUT面阵。
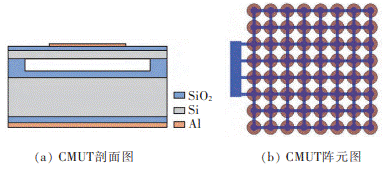
图1 CMUT剖面图及阵元图
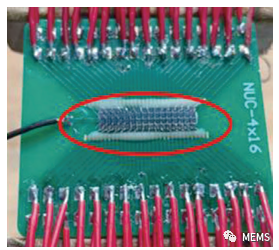
图2 基于16 × 4阵元的CMUT面阵实物图
CMUT的工作原理是通过在上、下电极之间施加直流偏压,从而产生感应静电力将顶部薄膜拉向底部电极。当CMUT处于发射模式时,将交流电压信号叠加在直流偏压上会激励薄膜振动,实现电能和机械能的转换,产生超声信号;当CMUT处于接收模式时,在上、下电极之间施加直流偏压,在超声波的作用下,薄膜会产生振动,从而使得电容值发生改变,通过检测这一变化即可实现超声信号的接收。
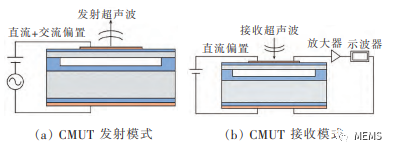
图3 CMUT工作原理
仿真及实验平台搭建
该研究利用基于Matlab的k-Wave光声仿真工具箱对基于16 × 4阵元的CMUT面阵进行超声反射成像仿真。整个仿真区域介质为硅油,被测物为一块长和宽均为3 cm、厚1 cm的铝块,铝块与CMUT的距离为3 cm,CMUT阵元间的距离为1 mm。此外,采用单个阵元发射、所有阵元接收,即一发多收的扫描方式对铝块进行扫描。
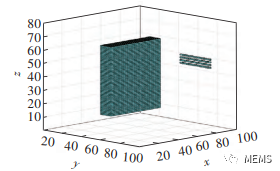
图4 基于16 × 4阵元的CMUT面阵及被测铝块仿真模型
随后,研究人员在仿真的基础上搭建了基于16 × 4阵元的CMUT面阵的超声反射成像测试系统。采用面阵上第二条线阵的单个阵元发射、所有阵元接收的方式进行实验测试。实验使用信号发生器和功率放大器驱动CMUT面阵发射超声波,并且利用示波器观察超声反射信号波形。
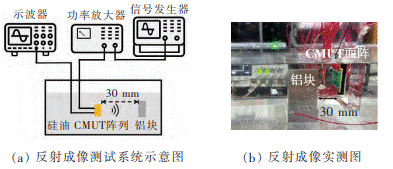
图5 基于16 × 4阵元的CMUT面阵超声反射成像测试系统示意图及超声反射成像实测图
仿真及实验结果
研究人员采用B模式及二次谐波两种成像算法分别对被测铝块的超声反射信号进行处理,以获取其三维图像及对应的二维切面。结果显示,基于16 × 4阵元的CMUT面阵的反射成像系统能够确定铝块的位置。此外,基于B模式成像算法和二次谐波成像算法所获取的成像结果中,铝块与CMUT面阵的距离重建偏差分别为3.63%及1.47%。
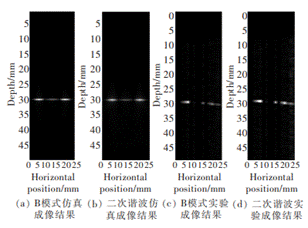
图6 被测铝块二维反射成像结果
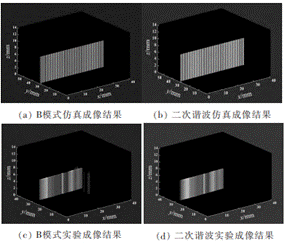
图7 被测铝块三维反射成像结果
综上所述,该研究搭建了基于16 × 4阵元的CMUT面阵的三维超声反射成像系统,以获得误差小、信噪比高的超声反射图像。采用单个阵元发射、所有阵元接收的收发方式对铝块进行了相关测试与仿真,利用B模式及二次谐波成像算法对超声回波信号进行处理,获取了被测物的二维切面及三维图像。仿真和实验结果均可以较清晰地确定铝块的位置,与实际情况相符。
为了对比两种算法的成像效果,研究人员计算了铝块与CMUT面阵的距离重建偏差。计算结果显示,B模式及二次谐波成像算法的仿真距离重建偏差分别为0.63%和0.4%,实验重建偏差分别为3.63%和1.47%,二次谐波图像的距离重建偏差均小于B模式图像的距离重建偏差。总之,该研究证明了所提出的基于16 × 4阵元的CMUT面阵的三维超声反射系统可实现对被测物的三维成像。
审核编辑:刘清
-
宽带放大器在CMUT阵列的超声反射成像研究中的应用2024-02-28 0
-
360度全息幻影成像2013-09-11 0
-
三维快速建模技术与三维扫描建模的应用2018-08-07 0
-
广西扫描服务三维检测三维扫描仪2018-08-29 0
-
三维立体成像X射线显微镜在元器件失效分析中的应用2019-08-31 0
-
Handyscan三维扫描仪对户外大型灯箱三维扫描解决方案2020-07-15 0
-
3种非接触式测量仪表有什么优势2020-11-03 0
-
基于超声层析成像技术的三维流场重建_王浩源2017-03-19 858
-
基于声纳探测技术的水下三维场景实时成像系统2017-11-18 15395
-
三维扫描仪使用方法及操作技巧2017-12-18 22388
-
三维扫描仪的工作原理2017-12-18 18527
-
光学三维测量技术的各种实现方法及原理2022-07-13 4011
-
泰来三维|文物古迹数字化保护_三维扫描墓塔2023-07-10 717
-
共聚焦显微镜如何三维成像2023-08-15 1116
-
偏振三维成像技术的原理和研究进展2023-10-26 1346
全部0条评论

快来发表一下你的评论吧 !
