

智能汽车功能安全方案:看门狗和平台健康管理
描述
前言
近年来,由于汽车技术的进步和各种组件的整合,汽车系统变得越来越复杂。随着汽车新四化的变革,配备的功能和特性越来越多,让汽车不再是传统观念里的汽车,而更加像一个“消费电子产品”,甚至像是一个“电动玩具”。
但这种智能化、电子化的趋势在增加产品功能、满足更多用户需求的同时,也增加了汽车系统本身的复杂性。这种复杂性带来了系统可靠性、维护和故障排除等方面的挑战。消费者会希望汽车更加智能互通,就像我们的智能手机等其他消费电子一样新颖酷炫。但相信消费者同时也希望汽车依然保持安全至上的产品属性,不会像消费电子一样动不动死机、卡屏或者变砖。
这种复杂的用户需求,无疑是当下智能汽车发展的重要推动力。各大厂家的工程技术人员也开发出更加强大的监控、故障诊断、测试和维护策略,以确保这些复杂系统的最佳性能和可靠性。这也跟我们经常强调的功能安全所强关联。这次我们就来看看其中两个重要的方案:看门狗(Watchdog)和平台健康管理(Platform Health Management)。
看门狗
看门狗的英语一般会说Watchdog Timer,虽然中文里往往省略了Timer的翻译,但是看门狗本质上是一个计时器机制。
抽象地来看,看门狗就是一个系统的守护狗,它会一直监控着它的“主人”,确保“主人”不会思想跑飞。怎么监控呢?它会期待“主人”(按照定时器)定期地给它喂食,如果按时投喂,则一切如常。如果超时了还没有被投喂,那看门狗可能会先吠叫几声,如果吠叫完还没有反应,那可能看门狗还会极端地去“咬”醒主人。
用工程语言再来描述的话,看门狗就是系统中的一个组件,用于监控其他组件的运行是否可能出现故障。当检测到可能的故障时,看门狗定时器系统会发出信号或启动适当的跳转指令,并根据当时的问题进行调整。信号或跳转指令可直接或间接触发其他合作的系统组件,从而解决问题。特别是在微控制器控制的设备中,经常可以看到看门狗的身影。这些看门狗定时器往往用来防止系统因软件故障而失效,看门狗会在固定的时间间隔内告知系统是否仍在正常工作。
那这个机制具体可以怎么实现呢?我们来看看下图的例子。
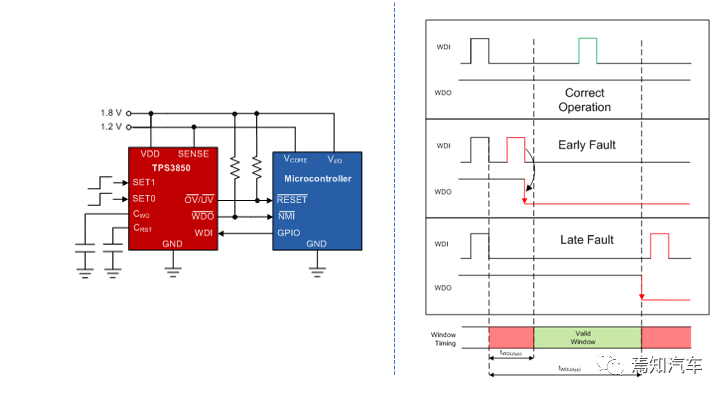
图:外置看门狗的实现原理示意图
图左方是TPS3850芯片和MCU芯片的威廉希尔官方网站 连接原理图。TPS3850可以监控电压和提供看门狗功能,这里我们只关注看门狗功能,对应“WDI”和“WDO”端口,也就是看门狗的输入和输出端口。上图右方就是这两个端口的信号示意图。当MCU按照正常周期输出高电平脉冲给WDI端口时,WDO端口就会稳定输出高电平。但WDI超前或者延后输出高电平脉冲时,就会触发WDO输出低电平,触发MCU上的中断。该中断可以在MCU上触发复位等操作。
当然,这个只是其中一种实现看门狗机制的例子。实际上我们可以通过不同的软硬件来实现这个机制。比如我们可以做一个纯软件的计时器,来实现看门狗的功能,也可以用纯硬件来实现这个功能。当然,软硬件结合后,再细分不同的监控对象,用不同的方式喂狗,就可以丰富监控和响应效果。比如某些程序喂狗失败就会重启应用或者功能降级,关键程序喂狗失败就会直接重启系统等。
而按照是否采用外部的独立看门狗芯片来区分,我们又常常会分为“内狗”和“外狗”。在汽车行业实际应用中,我们往往会同时采用多种类型的看门狗,比如同时采用内狗和外狗,来让系统更加高效的同时更加鲁棒。比如常见的英飞凌AURIX芯片,就针对每个CPU都有一个内置的看门狗,对整个AURIX芯片系统也有一个看门狗。这些都是内狗。同时,MCU也会往往由一个外部看门狗芯片(也常集成在电源管理芯片中)来监控MCU的状态。
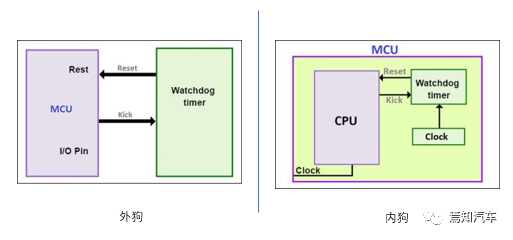
图:外狗、内狗示意图
平台健康管理
平台健康管理(Platform Health Management)则是AUTOSAR Adaptive Platform(AP)中一个重要的功能集群。它与执行管理(Execution Management)和状态管理(State Management)共同协作,是AP中的功能安全基石。
在监控内容方面,PHM可以对监控实体的存活(Alive Supervision)、逻辑性(Logical Supervision)和死线(Deadline Supervision)进行监控。
存活监控可检查受监控实体的运行频率是否过高或者过低。
死线监控可检查受监控实体中的步骤是否在Manifest中配置的最短和最长时间内执行。
逻辑监控可以检查执行过程中的控制流是否与设计的控制流相匹配。
这三种类型的监控可以独立使用,并基于被监控实体的检查点报告执行。
在操作系统拉起AP平台后,EM和SM就负责维护整个AP平台的进程、线程管理了,包括启动、终止和状态切换等。除了可以用来监控AP平台上的其他应用程序以外,PHM的一个关键任务就是监控EM和SM本身的状态。由于EM和SM是AP平台的关键基础特性,在任何正常的系统状态下,这两个功能集群都应该运行。当PHM监控到EM和SM出现异常时,PHM就需要重启整个机器(也就是重启操作系统)了,因为此时常规的系统状态切换和操作已经不可靠了。
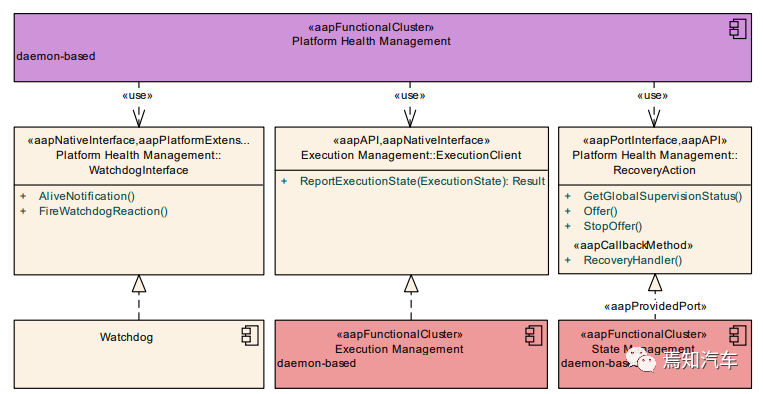
图6:PHM从EM、SM接口获取信息的示意图
看门狗与平台健康管理的协同
看到这里,相信聪明的你也开始把看门狗和PHM两者联系起来了。没错,当PHM监控到EM和SM异常时,就需要对看门狗进行相应操作以恢复系统。如上图左方所示,PHM和看门狗接口(Watchdog Interface)模块的交互接口主要有两个:
lAliveNotification:PHM会根据配置,周期性地调用该接口,通知看门狗接口模块,PHM还正常工作着。
lFireWatchdogReaction:某些情况下,PHM监控到关键进程失效,比如EM和SM,PHM可以通过该接口触发看门狗接口模块,驱动硬件看门狗进行复位操作。
说到这里,我们就不得不重新提到整个Adaptive Platform和Classic Platform的最大差别:AP本质上是中间件,不包含操作系统和底层驱动,而CP是包含底层驱动和操作系统的。在这个背景下,AP平台设计的PHM,其监控对象就是AP中间件及Adaptive Application (AA)。而PHM的故障响应策略也不是直接驱动硬件底层进行看门狗操作,而是留了接口,由外部的看门狗接口模块(不属于AP中间件)来去实现看门狗驱动和硬件看门狗的操作执行。
这与实际工程中AP和CP的应用环境也是一致对应的。CP通常跑在高度嵌入式的MCU中。MCU上一般也有芯片内部的硬件看门狗逻辑模块。按照芯片开发CP软件的时候,就能适配好内置看门狗驱动。而AP经常跑在复杂异构的SOC上,这些SOC往往并没有内置硬件看门狗。
写在最后
总的来说,PHM和看门狗关系密切,是保障智能汽车这个复杂系统能够可靠安全地运行的关键手段。PHM监控应用程序和关键中间件平台,主动维护系统健康。而看门狗则是持续守护系统的基石,在系统异常时,能够充当守门员作为最后一关,触发系统重启等安全操作。PHM和看门狗的协同,在日益复杂智能的汽车系统中,既能提高系统总体效率,又能确保系统安全和可靠。在汽车消费者越来越把汽车当作“消费电子”的时代,我们从业者更应该时刻警惕:汽车终究是一个交通工具,汽车安全性是重中之重,不可或缺。
而作为汽车工程师,我们亦可紧跟趋势,在使用AUTOSAR等架构减少重复开发的同时,专注于关键设计,例如AP平台之上PHM需要监控哪些实体,在故障发生时配置哪些响应行为等。希望大家能利用好PHM和看门狗的工具箱,共同设计出既智能好玩又安全的汽车产品。
审核编辑:汤梓红
-
什么是看门狗威廉希尔官方网站2008-10-21 8188
-
stm32看门狗时间计算 独立看门狗和窗口看门狗的特性是什么2016-10-10 8766
-
什么是stm32看门狗?独立看门狗和窗口看门狗工作原理解析2017-11-06 27501
-
STM32看门狗配置(独立看门狗IWDG和窗口看门狗WWDG)2017-11-09 8448
-
STM32的看门狗配置详情解说2017-11-13 4466
-
stm32看门狗的特点是什么2021-07-22 4060
-
MCU独立看门狗与窗口看门狗的区别2021-10-28 806
-
STM32:独立看门狗、窗口看门狗的配置2022-02-08 1144
-
窗口看门狗是什么?与独立看门狗有啥区别?2022-02-09 997
-
STM32中的独立看门狗和窗口看门狗2022-12-22 2156
-
STM32中的独立看门狗和窗口看门狗是什么2023-02-20 2743
-
MCU独立看门狗和窗口看门狗的区别2023-03-03 776
-
MCU如何集成看门狗的功能2023-06-22 1801
-
什么是看门狗,工业路由器看门狗技术的功能优势2023-03-27 1834
全部0条评论

快来发表一下你的评论吧 !
