

偏振三维成像技术的原理和研究进展
电子说
描述
摘要 :近年来偏振三维成像技术因具有精度高、作用距离远和受杂散光影响小等特点得以蓬勃发展,但利用目标反射光偏振特性进行法向量精确求解的问题一直没有真正得到解决,成为制约该技术发展的瓶颈。此外,由于目标表面镜面反射光与漫反射光间的相互干扰,造成高精度偏振三维成像实现困难。该综述介绍了偏振三维成像物理机理、目标表面出射光偏振特性,以及偏振三维成像研究进展。最后总结了目前偏振三维成像面临的问题和未来的发展方向。
引言
光电成像技术是人类记录和感知环境信息的重要方式和手段,然而传统光电成像虽是信息获取与记录的过程,但同时也是信息丢失的过程,由于探测器所限,其不仅丢失了光场中相位、偏振、光谱等信息,而且造成物体空间三维形貌信息也无法得到有效探测,造成成像效果受限。鉴于此,依据传统强度探测方式,结合光场多物理量信息解译模式,通过构建物体表面反射光信息与表面形貌之间的函数关系,来实现物体表面三维信息的求解,就成为目前光电成像技术发展中的一个重点和热点。
目前三维成像技术根据成像模式可分为基于光源调制的主动三维成像和基于立体视觉的被动三维成像两类。基于光源调制的主动三维成像包括时间飞行法(Time of Flight,ToF)、激光雷达三维成像和结构光三维成像。ToF利用光波时空特性进行三维空间的测量,目前已在商业领域广泛应用,但是该技术易受环境光干扰,且受限于信号系统的时间分辨率,故其三维成像精度不高;激光雷达三维成像利用激光测距原理,实现系统-目标微面元距离信息的获取,之后通过机械式扫描或光束偏转的方式实现目标表面三维信息的重建,因此这种三维重建方式在对大目标的三维成像中实时性差,并且由于其机械结构复杂,导致系统体积较大、造价较高,难以实现普及;结构光三维成像技术是将一定规则的编码条纹图像投影到目标表面,通过对拍摄到的轮廓图像进行解码,构建相机平面与投影平面中点与点之间的一一对应关系,并结合相机标定参数实现三维表面的获取,其具有成像精度高的优势,但是该系统需要主动光源照明,对照明光模式依赖强,因此抗环境光干扰能力差,且随着成像距离的增加,编码条纹的精度会随之下降,严重影响三维成像精度。
目前,基于立体视觉的被动式三维成像主要包括双目三维成像和基于光场相机的三维成像。双目三维成像技术基于人眼视觉原理,利用三角测距技术构建物体的三维表面轮廓信息,由于其重建精度与相机基线长度成反比,因此在对远距离目标成像时难以实现高精度的三维表面信息获取。基于光场相机的三维成像技术通过在镜头和探测器之间嵌入微透镜阵列,实现光线的方向测定,进而获取被动条件下的三维信息,但与双目三维成像类似,该技术受限于微透镜阵列间的间距,无法实现远距离三维成像并且成像精度较低。然而,伴随着安防监控、深空探测以及目标检测识别等众多领域对远距离、高精度、高维度的目标信息需求越来越迫切,通过深度挖掘和解译光场的多维物理信息,来实现远距离、无损、高精度的三维成像就成为该领域目前主要的发展方向。众所周知,光波的偏振特性信息与目标表面法线间存在函数表征关系,能够直接反映出目标形貌特性。因此,研究建立物体表面反射光偏振特性信息与表面形貌之间的函数关系,能够为实现重建精度高、探测设备简单以及非接触的三维重建技术提供方案。
国内外研究学者从上世纪70年代开始探索利用偏振信息对目标表面进行三维形貌恢复(Shape-from-Polarization),此后衍生出了一系列偏振三维成像方法。这些方法的核心是利用菲涅尔定律建立反射光偏振特性与目标表面法线方向的函数关系来实现三维形貌重建,但是忽略了反射光类型不同对重建结果的影响。然而,由于自然界中目标表面材质的多样性,表面出射光波偏振特性呈现显著差异,如图1所示。因此,深入分析不同目标表面出射光波的偏振特性,进而获取目标表面三维轮廓信息就成为偏振三维成像技术研究的核心。本文将分别从基于镜面反射光和漫反射光的偏振三维成像基本原理出发,针对求解重建过程中存在的法线方向不确定性问题,综述国内外具有代表性的典型技术方法;并对基于散射光偏振特性的三维成像技术中存在的关键技术问题进行总结,重点分析研究了镜面反射-漫反射分量分离困难、目标绝对深度信息无法获取等问题;最后对偏振三维成像技术未来发展趋势进行了展望。
1 偏振三维成像的原理
由于目标表面微面元的三维轮廓与其法向量之间具有唯一性,因此通过对表面微面元法向量信息的求解,能够实现目标三维轮廓的重建。
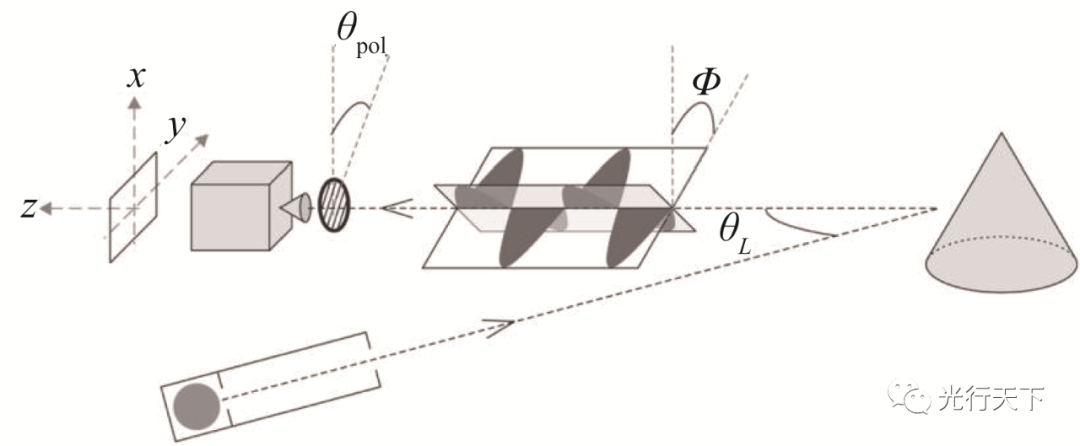
偏振三维成像过程示意图
3 偏振三维成像技术未来展望
目标表面反射光偏振特性作为一种能够准确反映表面高频三维轮廓特征的固有属性,利用该信息进行三维成像具有高精度、远距离以及非接触等优势。随着偏振三维成像技术进一步的发展与完善,其在地形测绘、文物保护以及安防监控等领域具有越来越广泛的应用,如图28所示。目前,限制偏振三维成像技术大范围应用的主要有以下两个方面:
(1)自然界中的大部分物体表面是非理想朗伯体,因此其表面出射光中会同时存在镜面反射光与漫反射光。目前基于镜面反射光的偏振三维成像技术主要应用于玻璃、金属等表面光滑的物体三维成像。而在对自然目标进行偏振三维重建的过程中,目标微面元法向量特性主要由漫反射光分量提供,但是基于漫反射光的偏振三维成像技术中大多假设目标表面是理想的朗伯体,而自然目标表面反射光情况并不单一,通常存在镜面反射分量干扰,并且在某些特殊目标表面的局部区域存在高光,使得该区域的漫反射光信息趋近于零,造成三维成像结果中局部区域畸变。因此,开展基于反射光偏振特性的镜面反射-漫反射光分离技术的研究,是推进偏振三维成像技术走向实际应用的关键一步。(2)在目标表面三维轮廓的恢复过程中,需要对目标表面微面元法线场点云数据进行多重积分,实现目标三维重建。这就造成在没有外界设备辅助的情况下,仅依靠单相机获取得到的目标多维物理量信息无法实现目标轮廓真实深度信息的测量。所以,在不增加设备复杂度的情况下实现目标绝对深度信息的获取与目标镜面反射-漫反射分量的分离都将是未来偏振三维成像研究领域的重点。
针对上述偏振三维成像中亟待解决的关键技术问题,我们也开展了相关技术研究,提出一种当目标表面存在局部高反光区域时的偏振三维成像方法,通过分析镜面反射光与漫反射光特性,利用基于双色反射模型的反射光分量分离方法,实现镜面反射与漫反射光的分离。该方法认为高光像素值是漫反射分量和镜面反射分量的线性组合,其中漫反射分量是入射光经过物体表面的多次折反射后返回物体表面,其光谱成分由物体材质的反射特性决定;镜面反射分量则是入射光线直接在物体表面的反射,其与表面粗糙度、光源方向有关,其光谱成分近似于光源的光谱成分。之后,利用漫反射和镜面反射在最大色度-灰度空间的不同特性,分别实现对镜面反射分量和漫反射分量的估计。进一步,对于局部高光区域中漫反射光分量趋近于零,无法利用漫反射信息进行三维成像的情况,我们采用基于三维轮廓梯度变化的缺失区域估计技术,对该区域信息进行估计填补,目前对该技术进行了初步验证,实现了对表面缺失部分的重建。此外,对于偏振三维成像过程中绝对深度信息的获取,我们提出一种基于单相机标定的偏振三维成像方法,通过对成像系统进行标定,构建世界坐标系与像平面坐标系间的关系,获取目标表面特征点在空间方向上的绝对距离信息,为整体三维成像结果的相对-绝对深度信息的转换提供先验信息,最终实现目标轮廓绝对深度信息的获取。
此外,随着神经网络技术的不断发展,越来越多的研究人员开始研究将深度学习技术应用于物体的三维重建。由于人脸等目标具有特征空间明确,且训练数据容易获取等特点,目前已实现在不同场景下基于深度学习的人脸三维重建,并取得较好的重建结果。因此,除解决上述难点以外,偏振三维成像未来较有意义的研究方向为:(1)如何利用深度学习估计得到的人脸轮廓信息,构建人脸微面元法向量校正模型,实现预测信息与真实测量信息的有效结合,解决基于偏振特性求解得到的法向量参数多值性问题,得到成像精度更高、重建更精确的三维人脸目标;(2)目前大部分基于目标出射光偏振特性的三维成像方法只能实现场景中单个目标的三维成像,如何在不借助辅助探测方法的条件下,通过单探测器实现场景中多个不连续物体的三维重建;(3)随着微纳加工技术的进一步发展,如何提升可见光、红外等波段偏振信息探测的精度,并实现高分辨率的偏振子图像获取,将会对偏振探测的发展产生深远影响。
4 总结
文中首先介绍了基于目标表面反射光偏振信息的三维成像方法,在此基础上对Wolff提出的物体表面反射模型进行详细的介绍。此外,对基于镜面反射光和漫反射光在偏振三维成像过程中存在的入射角与方位角多值性问题进行了分析,并分别对解决入射角与方位角多值性问题的方法进行了综述。目前,在基于镜面反射光的入射角多值性问题消除过程中,基于旋转目标、多相机、多波段的入射角歧义值消除技术,均无法通过一次偏振探测实现入射角唯一性的测量;基于漫反射分量的入射角歧义值消除技术,存在漫反射分量少、需要对镜面分量-漫反射分量进行分离,实现过程复杂;在消除方位角多值性问题的方法中,同样存在多次探测、求解方式复杂等问题。在基于漫反射光的偏振三维成像技术中,目前基本都需要与另一种三维感知技术相结合,获取方位角的先验信息。而这些获取先验信息的方法,也正是限制基于漫反射偏振三维成像技术被广泛应用的主要因素。因此,无论对于基于镜面反射还是漫反射的偏振三维成像技术,进一步研究消除入射角和方位角歧义值的方法都十分必要。此外,对于同时包含有镜面反射与漫反射信息的物体表面出射光,如何利用偏振特性实现两种不同特性信息光的分离,并实现目标绝对深度信息的获取,是偏振三维成像技术未来研究的重要方向,也是其走向实际应用过程中亟待解决的难点。
审核编辑:汤梓红
-
新型铜互连方法—电化学机械抛光技术研究进展2009-10-06 0
-
薄膜锂电池的研究进展2011-03-11 0
-
面向新兴三维视频应用的技术研究与开发2012-07-31 0
-
三维快速建模技术与三维扫描建模的应用2018-08-07 0
-
三维立体成像X射线显微镜在元器件失效分析中的应用2019-08-31 0
-
基于STM32的三维旋转显示平台设计(立体成像)!!!2020-08-27 0
-
一维光子晶体研究进展2009-03-11 836
-
激光三维成像技术及其主要应用2012-07-16 1623
-
基于三维成像的雷达散射截面积反演研究2021-06-19 694
-
SAR微波视觉三维成像新进展2023-01-16 1550
-
光学偏振成像技术的研究、应用与进展2023-04-15 3837
-
短波红外偏振成像技术的研究进展综述2023-07-17 1696
-
基于光学成像的物体三维重建技术研究2023-09-15 891
-
深度学习偏振成像技术的研究进展2024-03-29 1230
-
激光距离选通三维成像技术研究进展综述2024-05-28 2994
全部0条评论

快来发表一下你的评论吧 !
