

基于高光谱技术的褐土土壤总氮含量的预测2.0
电子说
描述
引言
土壤营养元素的含量是提高农作物产量和农产品品质的重要因素。对土壤营养元素进行准确测量是实施精细农业的基础。传统的土壤营养元素的测定方法为化学法,化学法测量结果精度高,但需要消耗大量的时间和人力,难以满足土壤营养元素实时监控的要求。高光谱技术光谱分辨率高、光谱通道数多,能够更加真实、全面地反映物体的固有光谱特性及其差异,从而能够提高土壤营养元素的预测精度。高光谱技术已广泛应用于土壤营养元素的预测与反演。
本文以山西典型褐土土壤为研究对象,所有土壤样品经风干后,未经研磨过筛处理,直接装入样品杯进行测量。并采用高光谱成像技术获取近红 外高光谱图像,并 提 取 平 均 光 谱 曲 线(A)、标准差曲线(S)和方差曲线(V)等统计参数。然后分别采用以平均光谱曲线(A)、平均光谱曲线的一阶导数 (F)、A与F的乘积(A*F)、A与F的商(A/F)为基础的20种光谱预处理方法,结合PLS方法进行建模,并对验证集进行验证。
本文旨在构建一种结 合高光谱成像技术特点的,针对未经研磨和过筛处 理的褐土土壤总氮含量的定量预测模型,并为土壤其他营养元素的快速预测提供参考。
结果与分析
2.1 不同PLS模型的建模结果
分别采用 A、F、A*F、A/F等20种光谱预处理方法,结合PLS方法进行建模,并对验证集进行验证。不同PLS模型及对验证集的验证结果见表3。不同光谱数据预处理方法对验证集RPDc和Rc2的影响见图3和图4。
表3 不同 PLS模型及对验证集的验证结果
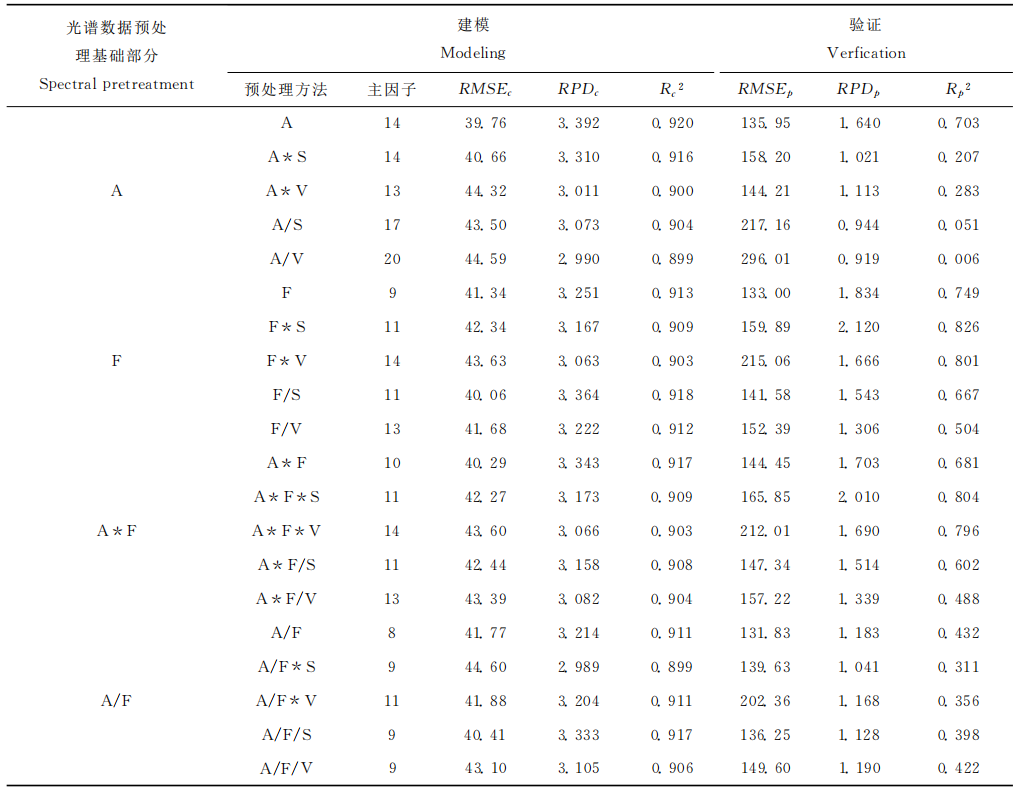
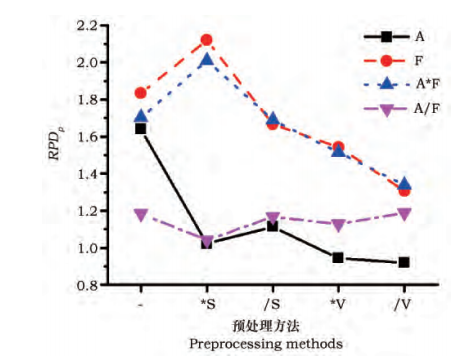
图3 不同光谱数据预处理方法对RPDc的影响
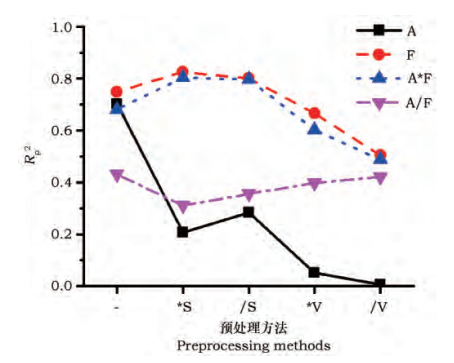
图4不同光谱数据预处理方法对Rc2的影响
由于在建模时优先考虑了模型对建模集的验证效果,并使所有模型的RPDc和Rc2基本相同,因此对模型进行评价只需要对比不同模型对验证集的验证效果即可。建模效果最好的预处理方法为F*S,其PLS模型的主因子个数为11,验证集RMSEp=159.89,RPDp=2.120,Rp2=0.826;其次为A* F*S,其PLS模型的主因子个数为11,验证集RMSEp=165.85,RPDp=2.010,Rp2=0.804。这两个模型的RPDp在2.0以上,Rp2在0.8以上,可以对褐土土壤的总氮含量进行有效预测;其它模型的RPDp均小 于 2.0,对总氮含量的预测效果 较差。当只使用平 均光谱曲线A进行建模时,建模效果从好到坏依次为:F>A*F>A>A/F。即使用平均光谱曲线的一阶导数F和平均光谱曲线与一阶导数的乘积A*F能够取得更好的建模效果。
当结合其它统计参数(S、V)进行建模时,以A和A/F为基础的PLS模型的RPDp和Rp2均有大幅 下降,即A和 A/F不适合与S、V 组合进行建模。对于以F和A*F为基础的PLS模型,只有与标准差的乘积(*S)能够提高建模效果;而其他方法(/S、*V、/V)的建模效果均低于只使用F和A*F的建模效果。
讨论与结论
本文以山西典型褐土土壤为研究对象,所有土壤样品经风干后,未经研磨过筛处理,直接装入样品杯进行测量。并采用高光谱成像技术获取近红外高光谱图像,并 提取平均光谱曲线(A)、标准差曲线(S)和方差曲线(V)等统计参数。然后分别采用以A、F、A*F、A/F为基础的20种光谱预处理方法,结合PLS方法进行建模,并对验证集进行验证。
主要结论如下:
(1)平均光谱曲线随总氮含量先增加后减小,可能导致两个总氮含量差异极大的土壤样本的平 均光谱曲线非常接近,从而影响预测模型的预测准 确性。一阶导数曲线随总氮含量的增加而单调增加,使用一阶导数进行建模,可能能够获得更好的预测效果。
(2)建模效果最好的预处理方法为F*S,其PLS模型的主因子个数为11,验证集RMSEp= 159.89,RPDp=2.120,Rp2=0.826;其次 为 A* F*S,其PLS模型的主因子个数为11,验证集RMSEp=165.85,RPDp=2.010,Rp2=0.804。这两个模型的RPDp在2.0以上,Rp2在0.8以上,可以对褐土土壤的总氮含量进行有效预测;其它模型的RPDp均小于2.0,对总氮含量的预测效果较差。
(3)当只使用平均光谱曲线A进行建模时,使 用平均光谱曲线的一阶导数F和平均光谱曲线与一阶导数的乘积A*F能够取得更好的建模效果。当结合其它统计参数(S、V)进行建模时,只有F和A*F与标准差的乘积(*S)的预处理方法能够提高建模效果。
本文选用的土壤样本未经研磨和过筛处理,能够极大缩短制样时间,提高预测效率。本文结合高光谱成像技术的特点,提出了多种统计参数结合的光谱数据的预处理方法,可为高光谱成像技术的土壤营养元素的反演提供参考。本文研究结果可为 近红外高光谱成像技术应用于褐土土壤其他营养成份的快速预测提供参考。光谱数据预处理方法 对其他建模方式、其他土壤类型、其他营养元素的反演有待进一步研究。
推荐:
无人机高光谱成像系统iSpecHyper-VM100
一款基于小型多旋翼无人机高光谱成像系统,该系统由高光谱成像相机、稳定云台、机载控制与数据采集模块、机载供电模块等部分组成。无人机机载高光谱成像系统通过独特的内置式或外部扫描和稳定控制,有效地解决了在微型无人机搭载推扫式高光谱照相机时,由于振动引起的图像质量较差的问题,并具备较高的光谱分辨率和良好的成像性能。

审核编辑 黄宇
-
农业土壤中总氮和总有机碳的近红外检测.2017-02-14 799
-
土壤肥料养分速测仪的技术指标2020-01-08 584
-
土壤氮磷钾检测仪是什么,它的作用是什么2020-12-01 4331
-
土壤氮磷钾检测仪可分析土壤中的氮磷钾含量2021-04-12 2802
-
土壤氮磷钾检测仪是如何检测土壤中的养分2021-04-19 553
-
土壤氮磷钾检测仪的特点是什么2021-07-29 289
-
土壤氮磷钾检测仪的详细介绍2021-08-14 1159
-
土壤氮磷钾检测仪研究氮磷钾对土壤的作用2021-09-03 668
-
土壤养分检测仪检测土壤氮磷钾含量2021-10-12 668
-
隆云通土壤氮磷钾传感器介绍2022-09-22 583
-
土壤总氮和总磷含量的高光谱遥感2023-03-15 835
-
基于高光谱技术的褐土土壤总氮含量的预测1.02023-10-31 1281
-
利用高光谱技术估测小麦叶片氮量和土壤供氮水平2024-05-24 281
-
地物光谱仪:水稻高光谱与叶绿素含量研究2024-08-05 181
全部0条评论

快来发表一下你的评论吧 !
