

基于无人机遥感的矿山重建植被功能多样性研究
电子说
描述
植被功能多样性是反映生态系统固碳能力的重要指标,估测功能多样性对于评价生态恢复成效和指导生态修复工程具有重要意义。无人机遥感可以快速获取精细的群落结构和功能数据,为生态修复成效评价和植被优化提供可依据。
采用无人机摄影测量系统获取地面数据,提取植物群落形态和生理参数,反演功能多样性,揭示修复模式对植物群落性状及功能多样性的影响,为矿区生态监测与评价提供科技支撑。
01功能多样性测度方法
植物群落性状
功能多样性的实质是功能性状的多样性,功能性状是指与植物定植、存活、生长和死亡紧密相关的一系列核心植物属性,且这些属性能够显著影响生态系统功能。最显著和易测量的性状是形态性状和生理性状。矿区生态修复主要目的是构建稳定的植物群落、恢复生产力和碳固定功能,因此主要考虑与光合、生长和资源竞争相关的形态或生理性状。
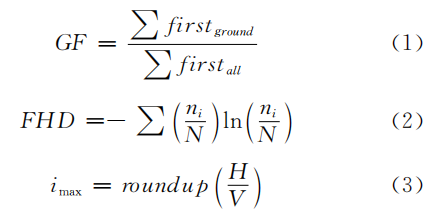
在形态性状方面,本文选取95%高度分位数(HP95)、间隙率(GF)、叶高多样性(FHD)三个指标来描述植物群落的垂直高度、水平开放度和冠层内部竞争性,计算见式(1)~式(3)。95%高度分位数是指植被到地面的垂直距离,其计算方法是将样地内所有归一化的激光雷达点云按高度进行排序,然后计算样地内95%的点所在的高度,95%高度分位数越大,植物群落能利用的垂直生长空间资源更多。间隙率是指植被首次回波的比例,比例越高表明穿透率越大,间隙率越小,植物群落对水平空间资源利用程度越高。
02功能多样性反演结果与分析
植物群落性状提取精度
在六个植物群落性状中,95%高度分位数和叶高多样性是从激光雷达点云数据中直接提取,无实测值。对于间隙率、植被含水量、叶绿素含量、类胡萝卜素含量四个性状,采用回归分析法计算性状实测值与遥感提取值之间的相关性(图3)。在形态性状方面,间隙率估算精度较高,R’达到 0.898,均方根误差为0.480。在生理性状方面,植被含水量、叶绿素含量、类胡萝卜素含量估测的R’分别为0.629、0.6480.641,表明植物群落内部生理性状变异性大,生理性状的遥感估测精度略低于形态性状。

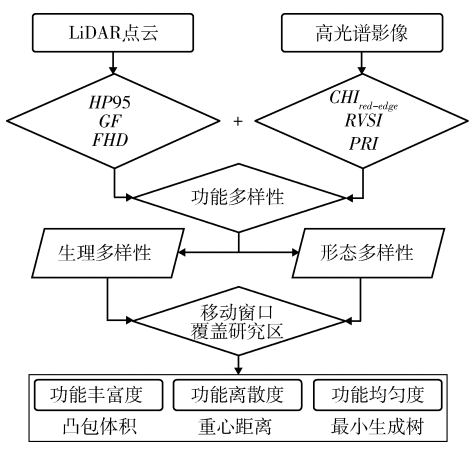
图2 基于无人机遥感的植被功能多样性测度方法
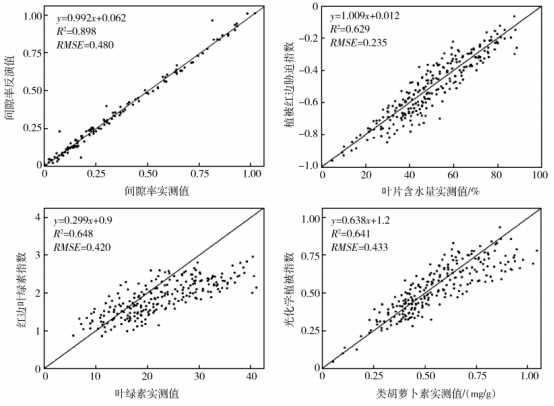
图3 植物群落性状反演精度
植物群落形态性状与生理性状
图4为研究区及典型植物群落的形态性状和生理性状的遥感反演结果。
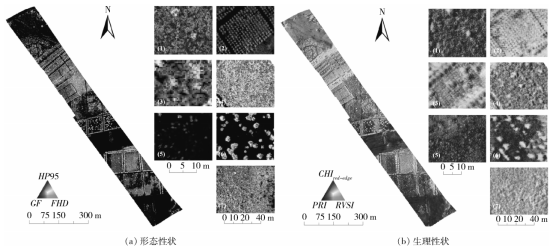
(1)-沙棘;(2)-杨树;(3)-沙棘+柠条;(4)-刺槐;(5)-草本;(6)-紫穗槐;(7)-油松
图4 研究区及典型植物群落的形态性状和生理性状
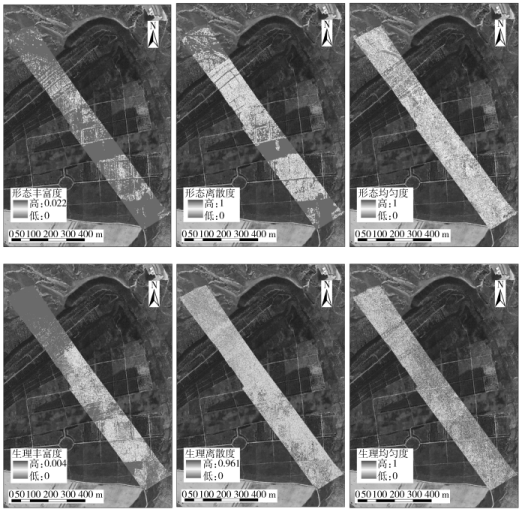
图5 研究区及典型植物群落的功能多样性
表1 不同植被重建初始优势种群落的功能多样性
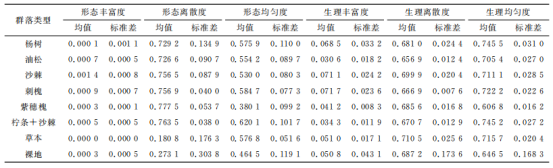
结合植物性状及功能多样性结果来看,初始生态修复引种植物为杨树和油松的群落经过10a的演替后,垂直和水平形态结构丰富,但生理性状一般且较为均一。刺槐、紫穗槐、柠条十沙棘群落在演替后,形态性状和生理性状均较为丰富,但类胡萝卜素含量偏低;沙棘群落在演替后,形态性状和生理性状都较为单一,且植被红边胁迫指数高,面临较大程度的水分胁迫。草本和裸地植物稀疏,形态性状和牛理性状及功能多样性水平都较低。
这表明初始植被配置会对植物群落演替造成显著影响,乔灌混合的植物群落在演替后的植物性状和多样性水平相对较高,垂直结构丰富,水平开放度高,对光、热、水分资源的利用更加有效,有利于形成稳定的群落结构因此,在生态修复时,应注意对不同高度、光合能力,水分需求的植物进行搭配,在生态修复后,可以依据植物性状及功能多样性实施间伐、补栽、修剪等群落优化措施,增强群落的自维持能力。
03结论
1)无人机机载激光雷达和高光谱数据能够有效反演植物群落的形态性状和生理性状,95%高度分位数、间隙率、叶高多样性的反演精度 R’大于0.9,叶绿素、类胡萝卜素、叶片含水量生理性状的反演精度 R’大于0.6。基于形态性状和生理性状,可以有效地定量描述植物群落功能多样性。
2)生态修复初期的植物配置会对演替后的植物群落功能多样性造成显著影响,乔灌混合的植物群落在演替后的植物性状和多样性水平相对较高垂直结构丰富,水平开放度高,对光、热、水分资源的利用更加有效,有利于形成稳定的群落结构。因此生态修复和后期管护时,可将植被功能多样性作为依据。
3)总体来看,无人机遥感可以获取精细的植物群落结构和功能数据,提取高精度的植物性状和功能多样性信息,识别不同植物群落的形态性状与生理性状差异,从而为生态修复和成效评价提供可依据。无人机遥感在矿山生态监测与评价中具有广阔的应用前。
推荐:
便携式高光谱成像系统iSpecHyper-VS1000
专门用于公安刑侦、物证鉴定、医学医疗、精准农业、矿物地质勘探等领域的最新产品,主要优势具有体积小、帧率高、高光谱分辨率高、高像质等性价比特点采用了透射光栅内推扫原理高光谱成像,系统集成高性能数据采集与分析处理系统,高速USB3.0接口传输,全靶面高成像质量光学设计,物镜接口为标准C-Mount,可根据用户需求更换物镜。
审核编辑 黄宇
-
为无人机上传感器网络使用能量收集2016-03-03 0
-
无人机遥感技术2016-03-11 0
-
高精度晶振是各大厂商无人机遥感技术大PK的关键2016-06-23 0
-
【秀秀资源】无人机相关资料合集2017-02-15 0
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 0
-
基于Python的矿山遥感监测系统开发的方法2020-08-11 0
-
无人机遥感在非战争军事行动中的应用2016-01-11 524
-
无人机遥感系统的研究进展与应用前景2016-01-08 982
-
无人机遥感技术的特点及应用2017-10-12 1309
-
无人机遥感技术对高粱生长状态的监测研究2022-04-14 1661
-
高光谱遥感在植物多样性研究中的应用进展与趋势2024-04-08 738
-
基于无人机高光谱遥感的典型草原打草对植被表型差异分析2024-06-14 357
-
无人机高光谱影像与冠层树种多样性监测2024-08-19 276
-
基于无人机多光谱遥感的棉花生长参数和产量估算2024-08-21 474
全部0条评论

快来发表一下你的评论吧 !
