

一文读懂图像传感器的选型
描述
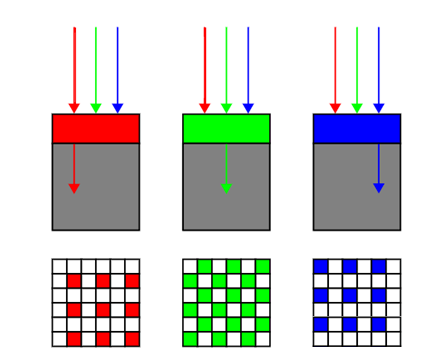
图像传感器是将光信号转换为电信号的芯片,在相机、智能手机、安防监控、汽车电子和机器视觉等市场中有着广泛的应用。图像传感器的工作原理主要基于光电效应。光子通过镜头进入传感器,并被传感器中的光电二极管吸收,产生电子。电子被收集并转化为电信号,经过放大和处理,最终形成数字图像。
来百度APP畅享高清图片图1、图像传感器工作原理(图源:硬禾学堂)图像传感器按技术原理通常分为CCD(Charge-Coupled Device,电荷耦合器件)、CMOS(Complementary Metal Oxide Semiconductor,互补金属氧化物场效应管)和CIS(Contact Image Sensor,接触式图像传感器)、ToF 3D Image Sensors(Time of Flight 3D Image Sensors,3D-ToF 图像传感器)和TIS(Thermal Image Sensor,热敏图像传感器)五种。CCD和CMOS最为常见,CIS一般用在扫描仪中。由于是接触式扫描(必须与原稿保持很近的距离),只能使用LED光源,其景深、分辨率以及色彩表现目前都赶不上CCD感光器件,也不能用于扫描透射片。
图2、图像传感器示例(图源:滨松)
CCD具有低照度效果好、信噪比高、通透感强、色彩还原能力佳等优点,主要用于照相机、摄像机、智能交通、医疗等高端应用。因成本高、功耗大,一定程度上制约了CCD的市场发展空间。随着CMOS工艺和技术的不断提升,加之高端CMOS的价格不断下降,在安防高清摄像、工业和汽车等市场,CMOS的市场份额越来越高。

图3、CCD与CMOS对比表(图源:小牛自动化)
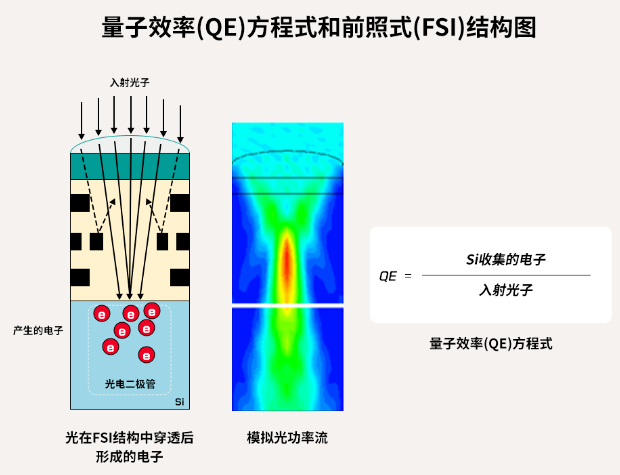
图像传感器的功能是光电转换。关键的参数有像素、单像素尺寸、芯片尺寸、功耗。CMOS图像传感器也是一个多层结构,技术工艺上有前照式(FSI)、背照式(BSI)、堆栈式(Stack)等。前照式(FrontSide lllumination,缩写为FSI)结构中,自上至下依次为片上透镜(Micro-lens)、彩色滤光镜(Color Filter)、威廉希尔官方网站 层(Wiring Layers)和光电二极管(Photodiodes)。当光线射入,经过了片上透镜和彩色滤光片后,先通过威廉希尔官方网站 层(金属排线层),最后光线才被光电二极管接收。
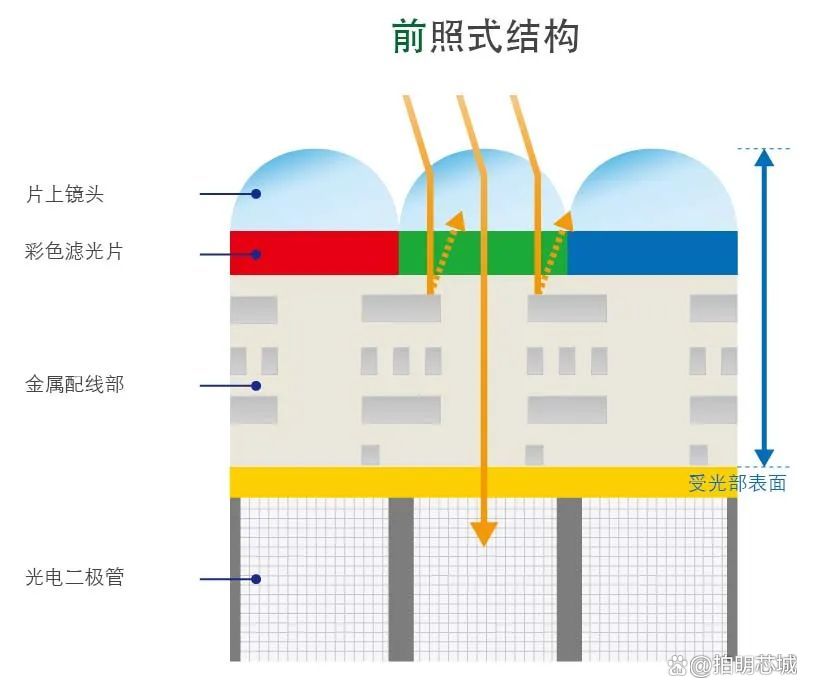
图4、前照式CMOS图像传感器结构背照式CMOS(Back-Illuminated CMOS或者BackSide Illumination,BSI)的金属排线和光电二极管的位置和前照式正好相反。自上至下依次为片上透镜(Micro-lens)、彩色滤光片(Color Filter)、光电二极管(Photodiodes)和威廉希尔官方网站 层(Wiring Layers)。
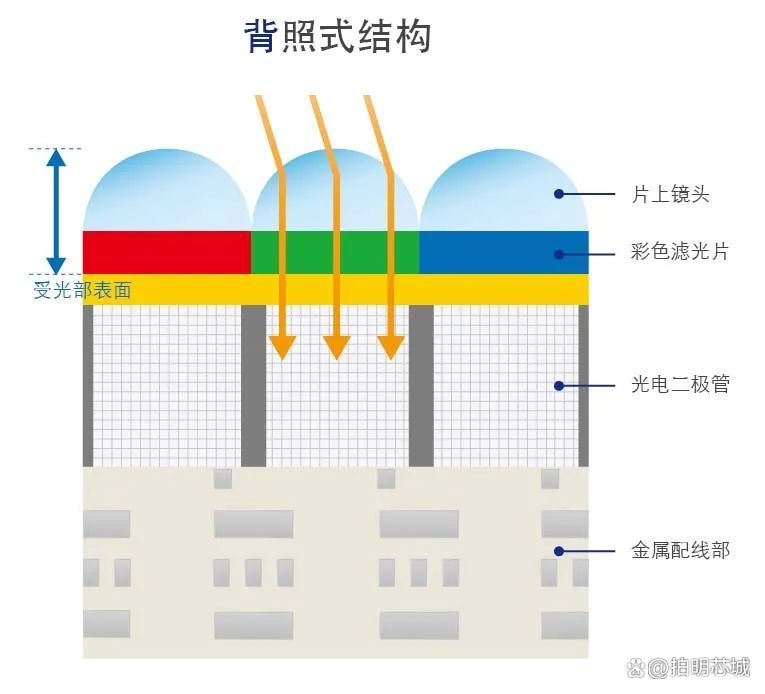
图5、背照式CMOS图像传感器结构将像素单元和威廉希尔官方网站 单元分别是作为独立芯片构建,使用30nm制程打造威廉希尔官方网站 单元,65nm打造像素单元,并单独“退火”,然后将两个单元堆叠到一起,这就是堆叠式CMOS,也叫堆栈式,积层式(stacked CMOS)。堆叠式不仅继承了背照式的优点(像素区域依然是背照式),还克服了其在制作上的限制与缺陷。由于处理回路的改善和进步,摄像头也将能提供更多的功能,比如说硬件 HDR,慢动作拍摄等等,同时因为像素区域和威廉希尔官方网站 区域分开,CMOS的尺寸变小。另一方面,相同CMOS尺寸下,像素区域能更大。以上, 堆叠式CMOS具有了高画质,多功能,小型化的特点。
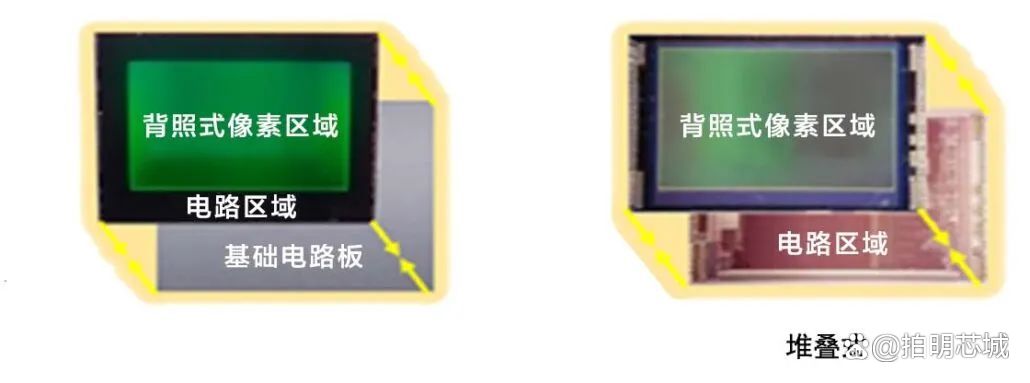
图6、堆叠式CMOS图像传感器结构
无论是CMOS或CCD图像传感器,其光电参数都可依据业界成熟的EMVA1288标准进行评价。EMVA1288标准是欧洲机器视觉协会(EMVA)制定,为视觉行业提供相机与图像传感器关键性能参数的测试标准,被中国CMVU、美国AIA、日本JIIA、德国VDMA等行业组织接受,是国际国内通用的相机与图像传感器测试标准。

图7、EMVA1288标准
接下来我们更详细地列出图像传感器的光电参数,以及工程师该如何理解和选型应用。图像传感器主要指标包含:
分辨率/像素数量(Resolution, Number of Pixels)、像素尺寸(Pixel size)、光学尺寸(Optical Format)、像素技术(Pixel Technology)、快门类型(Shutter Type)、量子效率(Quantum Efficiency, QE)、灵敏度(Sensitivity)、暗噪声(Dark Noise)、满阱容量(Full Well Capacity, FWC)、动态范围(Dynamic Range, DR)、暗电流(Dark Current, DC)、输出格式(Output Format)、输出接口(Output Interface)、最大帧率(Max Frame Rate)、主光线角度(CRA)、信噪比(SNR)、光谱响应特性(Spectral Response Characteristic)、色彩滤波阵列(Chroma)、封装(Package)、串扰(Crosstalk)、曝光时间(Exposure Time)、增益(Gain)、色彩模式(Color Mode)、功耗(Power)和性价比(Price Quality)等。
1、分辨率/像素数量(Resolution, Number of Pixels)
图像传感器的感光区是由多个像元排列的一维或二维矩阵,其中像元(或像素)为单个感光单元。图像传感器的分辨率通常由该矩阵的横纵方向的像元数表示,如1920 x 1080,或由其乘积表示,如2百万分辨率(2MP)。MP:Mega Pixel,兆像素(百万像素)常见的有0.3M、1M、2M、5M、13M、20M、40M、100M(1亿像素)等。像素数量和分辨率是两个密不可分的重要概念,它们的组合方式决定了图像的数据量,同样大小的图像,分辨率越高,包含的像素越多。像素总数是指所有像素的总和,像素总数是衡量CMOS图像传感器的主要技术指标之一。CMOS图像传感器的总体像素中被用来进行有效的光电转换并输出图像信号的像素为有效像素。有效像素总数隶属于像素总数集合。有效像素数目直接决定了CMOS图像传感器的分辨能力
。2、像素尺寸(Pixel size)
像素尺寸为每个像元的物理尺寸,即相邻像元中心的间距。像元尺寸越大,能收集到的光子数越多,芯片灵敏度越高,意味着在同样的光照条件下和曝光时间内,芯片能收集到的有效信号越多。在光强可控的工业应用中,像元尺寸一般在4.5-6.5微米之间;而在微光应用中,像元尺寸多在10微米到24微米之间,以保证足够的灵敏度,提升图像信噪比;在X射线成像应用中,多采用10-16微米的像元,可有效降低所需射线剂量,减少对人体不必要的辐射。像素尺寸通常的尺寸包括14um、10um、9um、7um、6.45um、3.75um、3.0um、2.0um、1.75um、1.4um、1.2um、1.0um等。同时,像元尺寸越大,满阱越高、动态范围越大,图像传感器的成像性能越好。然而在相同分辨率下,像元尺寸越大,芯片面积越大,芯片的成本和价格也会随着像元尺寸成平方关系增长。
3、光学尺寸(Optical Format)
图像传感器的光学尺寸(Optical Format)是指图像传感器感光区域对角线的长度,一般用英寸表示。由于几乎所有的工业镜头都按照传感器的光学尺寸来进行分类,它是图像传感器最常用的指标之一。由于历史原因,1"图像传感器的对角线长度为16毫米(而不是我们一般认为的25.4毫米)。例如,主流工业应用的图像传感器为2/3",其感光区域对角线长度为10.7mm。根据光学尺寸的大小,面阵CMOS 图像传感器可以分为光学尺寸>APS-C、光学尺寸介于 1"与 APS-C 之间、光学尺寸≤1"等三类。CMOS图像传感器的光学尺寸,成像系统的尺寸就越大,这样一来,传感器捕获的光子多,感光性就越好,信噪比越低。常见的CMOS图像传感器尺寸有1/2.5''、1/1.8''、2/3''、1''、4/3''、1.8''。
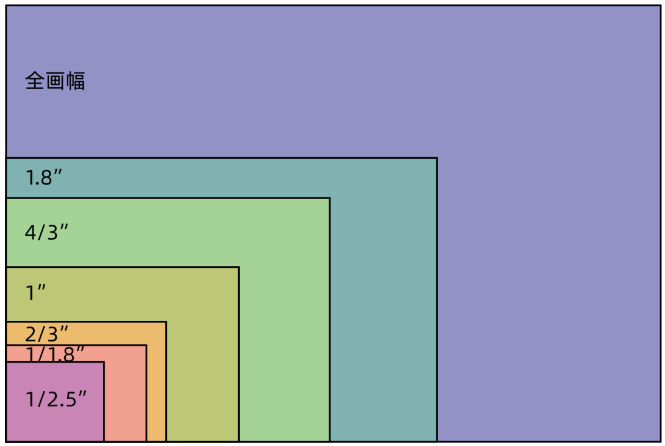
图8、图像传感器常见的光学尺寸4、像素技术(Pixel Technology)
像素技术是指前照式CMOS、背照式CMOS和堆栈式(Stacked)CMOS。前照式CMOS威廉希尔官方网站 层位于感光二极管前面,背照式CMOS威廉希尔官方网站 层位于感光二极管后面。前照式CMOS的金属威廉希尔官方网站 挡在受光面前面,这样会损失很多光线,真正能够被感光二极管接收和利用的光线只剩70%甚至更少。很显然,背照式CMOS极大提高了光线利用率,可以提高传感器灵敏度,最明显的改善就是低照度环境下成像质量更高。
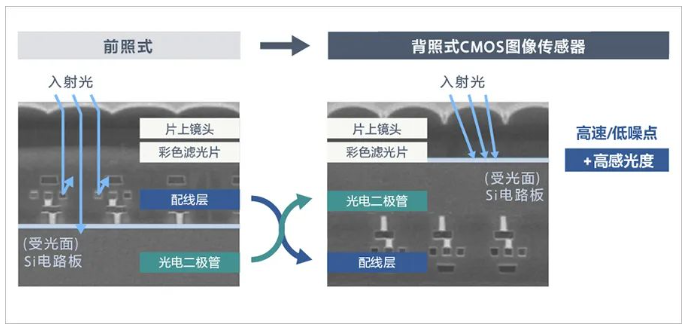
图9、前照式与背照式CMOS图像传感器区别
堆栈式CMOS图像传感器最大的特点在于它的双层结构,即将捕捉到的光线转换为电信号的像素部和将电信号转换为数字信息、进而进行信息处理的逻辑威廉希尔官方网站 部。堆栈式传感器是在背照式基础上的改进,将旁置的信号处理威廉希尔官方网站 放到了底部支持基板上,腾出空间放置更多的像素。
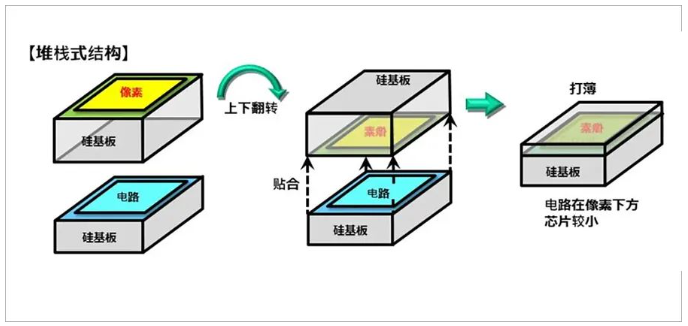
图10、堆栈式CMOS图像传感器
5、快门类型(Shutter Type)
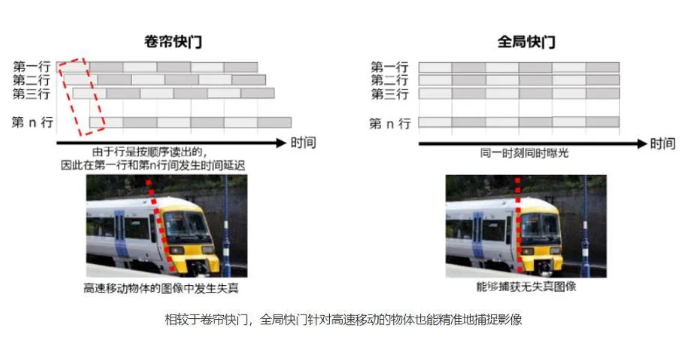
CMOS图像传感器片上集成电子快门,根据像素设计的不同,分为全局快门和卷帘快门。使用全局快门芯片时,所有像素同时开始曝光并同时结束,可捕捉高速运动物体的瞬时状态。
图11、两种快门模式(图源:影响空间)
全局快门:在全局快门像素设计中,每个像素中必须集成一个信号存储单元。当曝光结束后,每个像素将其所捕捉的信号转移至各自的存储单元中,然后逐行读出。由于在像素内集成存储单元需要相对复杂的威廉希尔官方网站 结构,降低了像素内有效感光面积,因此全局快门CMOS图像传感器一般噪声较高、灵敏度和动态范围较低,如索尼 IMX174的读出噪声为7个电子,CMOSIS(已被艾迈斯欧司朗收购)的CMV系列读出噪声为13个电子。卷帘快门:和全局快门不同,卷帘快门的每行像素开始曝光和截止曝光是在不同时间点发生的,但是所有像素的实际曝光时间是相等的。因卷帘快门像素内没有存储单元,曝光结束后,信号必须被马上读出。因为传感器无法在同一时刻读出所有行的信号,因此曝光须逐行停止、逐行读出。为了保证每行像素的曝光时间相同,因此每行的开始曝光时间也需要顺移。卷帘快门的工作模式如图一所示:
因无需存储单元,卷帘快门像素设计相对简单,可以最大程度优化有效感光面积,提升传感器的灵敏度,降低噪声。比如BAE Systems、滨松和长光辰芯光电的sCMOS传感器在卷帘快门模式下暗噪声都小于2个电子。是否可以使用卷帘快门对移动物体成像一直是比较有争议的话题,我们认为应根据具体应用参数评估,如物体相对移动速度、该运动物体在焦平面上的大小和曝光时间等。运动速度越快,在焦平面上的像越大,对全局快门传感器的需求越明确,如高速工业检测、汽车碰撞试验、爆炸分析、航空测绘等。反之,如使用卷帘快门芯片,在拟采用曝光时间内物体在焦平面上的扭曲可忽略或可矫正,则应采用卷帘快门芯片,以获得更高的灵敏度和更低暗噪声,提升图像质量。
6、量子效率(Quantum Efficiency, QE)
量子效率(QE)是描述光电器件(比如CMOS图像传感器)光电转换能力的一个重要参数,它是在某一特定波长(比如520nm)下单位时间内产生的平均光电子数与入射光子数之比。传感器的光电转换效率越高,其感光度就越高,图像能够提供的信息也更多。例如量子效率50%,意味着每2个照射到感光区域的光子可转化成1个电子。其中,FF(FillFactor)为开口因子,是每个像元中有效感光面积与像元面积的百分比。像元尺寸越大或像元设计越合理有效,FF越高,量子效率越高。对于背照式图像传感器,光信号不经金属遮挡,直接入射到感光区域,开口因子为100%。因此背照式图像传感器的量子效率较前照式器件有大幅提升。
CCD和CMOS图像传感器的量子效率一般在一定波长范围内测定,如400nm~ 800nm,峰值量子效率一般在550nm左右。在400nm以下和800nm以上,图像传感器的量子效率会急速下降。受硅材料能级的限制,无论CMOS还是CCD器件,量子效率在1100nm以上都下降到零。使用窄带半导体材料可实现对红外谱段的探测,但这些材料与标准CMOS技术不兼容,因此不属于CMOS图像传感器范畴。背照式图像传感器避免了正照器件表面二氧化硅层对紫外谱段的吸收,可实现对紫外谱段的探测。如在背照式工艺可对感光层表面进行加工,如添加紫外谱段抗反射镀膜,可在紫外谱段实现较高的量子效率。具备紫外探测能力的图像传感器在科学和工业应用中有非常广泛的用途,如光谱应用或高压设备故障检测等。如在图像传感器生产中采用加厚衬底材料,可增加红外谱段的吸收效率,实现在800nm实现高于40%的量子效率。7、灵敏度(Sensitivity)
灵敏度是衡量图像传感器光电性能的最重要指标,高灵敏度意味着可以在光照较暗或曝光时间较短的情况下得到清晰的图像,所以在微光成像、高速成像等应用中,应选取具有高灵敏度的图像传感器芯片。由于CMOS传感器的每个象素由四个晶体管与一个感光二极管构成(含放大器与A/D转换威廉希尔官方网站 ),使得每个象素的感光区域远小于象素本身的表面积,因此在象素尺寸相同的情况下,CMOS传感器的灵敏度要低于CCD传感器。
灵敏度是传感器输出信号相对入射光能量的变化,常用的灵敏度单位纳安/勒克斯nA/Lux、伏/瓦(V/W)、伏/勒克斯(V/Lux)、伏/流明(V/lm)。因各传感器厂家使用不同的单位,用户很难对不同厂家芯片的灵敏度进行比较。在比较不同传感器的灵敏度时,最客观的单位应该是以e-/((W/m2)·s),它表征了像素收集光子的能力和进行光子到电子转换的效率,只与像元尺寸和量子效率相关,与图像传感器的其他设置无关,因此可以最客观、科学的表征传感器的灵敏度。在EMVA1288标准中采用V/lux·s,需要注意的是电压应采用像素输出电压作为信号值。然而像素的输出电压与图像传感器的电子电压转换增益(Conversion Gain)相关,转换效率越高,灵敏度越高。因此如采用V/lux·s表征灵敏度时,须明确是像素输出电压,并标明转化增益。由于DN为传感器输出的最终数字信号,在不确定数字信号的放大倍数及模拟数字转换效率的情况下,一般不无法用DN/((W/m2)·s)来客观的表示传感器灵敏度。另一种是指器件所能传感的对地辐射功率(或照度),与探测率的意义相同,单位可用W(瓦)或Lux(勒克斯)表示。Sensitivity常作为sensor暗光表现的常用指标。
8、暗噪声(Dark Noise)
暗噪声,又称作时域暗噪声或读出噪声,是指像素在完全黑暗环境中、最短曝光时间内、帧与帧之间、同一像素输出的不一致性,它表征了图像传感器对于微弱信号的极限探测能力。如sCMOS器件的暗噪声为1.5个电子,量子效率为50%,则该探测器的极限探测能力为3个光子。当有充足光照或光照条件可控,暗噪声就不再重要了,因为它会被光信号的散粒噪声所淹没。以sCMOS器件为例,光信号为20000个光子,有效光信号为10000个电子,对应100个电子的散粒噪声,远超过1.5个电子的暗噪声。这时图像的信噪比将完全取决于光信号和光散粒噪声。整个成像链路中的威廉希尔官方网站 和元件都会对噪声有所贡献。主要贡献噪声包括散粒噪声、FPN噪声,读出噪声等。Shot noise是由于入射光子的时间和空间上的分布的统计特性导致的,光子是玻色子,满足玻色-爱因斯坦分布,在可见波段附近,满足hv>>kT,其分布可以用经典的泊松分布描述。Fano noise是光子激发多个载流子产生的,对于高能光子,其每一份光子可以激发出多个电子,因此低入射功率下可以看到其一份一份光子的光电转换过程。对于可见波段附近, Fano noise的影响几乎可以忽略不计(以硅为例,估算得到其Fano noise小于0.01e-)。除了随着波长减小Fano噪声增加外,随着功率的增加fano噪声也会增加趋势。FPN noise是由于器件之间的差异性导致的噪声,是一个不会随着时间变化的固定噪声。与shot noise不同的是,FPN噪声正比于信号,而不是信号的开方。因此FPN的抑制对实现HDR十分重要。FPN的产生原因主要有三个方面,一是图像传感器感光像素的性能差异,二是读出威廉希尔官方网站 的差异,三是光学元件的影响(比如有颗粒或者结构件导致的衍射干涉)。不过换一个思路想,也可以通过设计特定的光学元件来特意引入FPN,此时相当于FPN是一个像素阵列分辨率大小的矩阵,相当于在感光同时实现乘加运算。Read noise读出噪声是读出链路引入的噪声,它不是输入信号的函数,只与读出威廉希尔官方网站 有关。最终总的噪声是所有噪声源的叠加,可以通过PTC曲线的分析对器件的噪声链路实现分析。
9、满阱容量(Full Well Capacity, FWC)
满阱是指像素所能收集并容纳的电子个数的极限。满阱容量直接决定了图像传感器的最大信噪比。当光信号足够强,使得像素在较短曝光时间内达到满阱时,信噪比最高。此时,噪声被光信号的散粒噪声主导,所以最大信噪比为
因此:在微光应用和高速应用中,应选取低暗噪声和高灵敏度的图像传感器;而在光照充足或对于最大信噪比有明确要求的应用,应选取满阱容量高的图像传感器。
10、动态范围(Dynamic Range, DR)
动态范围是图像传感器成像质量最重要的指标之一,表征了传感器对强光和弱光同时分辨的能力。 图像传感器的动态范围高,就可以探测更宽光强范围内的场景信息,图像的细节更丰富。动态范围是满阱与暗噪声的比值,一般用分贝表示:
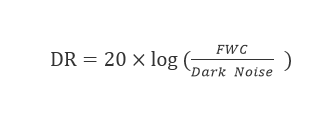
动态范围包括单幅动态范围(intra-scene)和最大动态范围。单幅动态范围是在同一增益设置下满阱容量和暗噪声的比值;而最大动态范围是芯片所能达到的最大满阱与最小暗噪声的比值。像素尺寸越大,满阱越高,动态范围越高,图像传感器的光电性能越好。用户需要注意区分“动态范围”和“最大信噪比”两个参数,动态范围是满阱除以暗噪声、最大信噪比是满阱除以达到满阱光强时的光散粒噪声,因此探测器动态范围往往远大于最大信噪比。
11、暗电流(Dark Current, DC)
暗电流为像素在单位时间内受热激发产生的电子的均值,单位为e-/s/pix。暗电流噪声为在一定曝光时间内产生的暗电流的平方根,例一个图像传感器的暗电流为36e-/s/pix,曝光时间为100秒,则暗电流为3600e-,暗电流噪声为60e-。因此,随着曝光时间的增加,暗电流噪声会超越暗噪声,对图像质量产生很大的影响。暗电流和传感器的工作温度关系密切。因此对于长曝光时间应用,如天文观测、荧光成像等,一般会对图像传感器进行制冷,使其工作温度在零下30度左右;对于科学级应用,甚至会降温到零下70度,以减小暗电流噪声对图像质量的影响。
12、输出格式(Output Format
)12.1、RAW(或RAWRGB)
CMOS图像传感器输出的原始图像格式是RAW。RAW图像就是CMOS图像感应器将捕捉到的光源信号转化为数字信号的原始数据。RAW文件是一种记录了数码相机传感器的原始信息,同时记录了由相机拍摄所产生的一些原数据(Metadata,如ISO的设置、快门速度、光圈值、白平衡等)的文件。RAW是未经处理、也未经压缩的格式,可以把RAW概念化为“原始图像编码数据”或更形象的称为“数字底片”。
12.2、RGB
RGB565,每个像素用16位表示,RGB分量分别使用5位、6位、5位(常用也就是上说的RGB)。
RGB555,每个像素用16位表示,RGB分量都使用5位(剩下1位不用)。
RGB24,每个像素用24位表示,RGB分量各使用8位。
RGB32,每个像素用32位表示,RGB分量各使用8位(剩下8位不用)。ARGB32,每个像素用32位表示,RGB分量各使用8位(剩下的8位用于表示Alpha通道值)。
12.3、YUVYUV三个字母中,其中"Y"表示明亮度(Luminance或Luma),也就是灰度值。而"U"和"V"表示的则是色度(Chrominance或Chroma),作用是描述影像色彩及饱和度,用于指定像素的颜色。YUV存储格式有两大类,planar(平面格式)和packed(打包格式)。13、输出接口(Output Interface)
13.1、MIPI,移动行业处理器接口,是MIPI联盟发起的为移动应用处理器制定的开放标准。串行数据,速度快,抗干扰,主流输出接口。13.2、LVDS,低压差分信号技术接口。
13.3、DVP,并口传输,速度较慢,传输的带宽低。
13.4、Parallel,并行数据,含12位数据信号,行场同步信号和时钟信号。
13.5、HISPI,高速像素接口,串行数据。
13.6、SLVS-EC,由SONY公司定义,用于高帧率和高分辨率图像采集,它可以将高速串行的数据转化为DC(Digital Camera)时序后传递给下一级模块VICAP(Video Capture)。SLVS-EC串行视频接口可以提供更高的传输带宽,更低的功耗,在组包方式上,数据的冗余度也更低。在应用中SLVS-EC接口提供了更加可靠和稳定的传输。
14、最大帧率(Max Frame Rate)
帧率指的是单位时间所记录或者播放的图片的数量,最大帧率指每秒可以输出多少帧的峰值。尽管有时会要求每秒60帧,但大多数传输使用的速度为每秒30-40帧。帧速率和分辨率密切相关,并影响需要处理的数据量。连续播放一系列图片就会产生动画效果,根据人类的视觉系统,当图片的播放速度大于15幅/秒的时候,人眼就基本看不出来图片的跳跃。在达到24幅/s~30幅/s时就已经基本觉察不到闪烁现象了。每秒的帧数或者帧率表示CMOS图像传感器在处理图像时每秒钟能够更新的次数。高的帧率可以得到更流畅、更逼真的视觉体验。
15、主光线角度(CRA)
从镜头的传感器一侧,可以聚焦到像素上的光线的最大角度被定义为主光角(CRA),镜头轴心线附近接近零度,与轴心线的距离越大,角度也随之增大。CRA与像素在传感器的位置是相关的。如果lens的CRA小于CMOS Sensor的CRA,一定会有偏色现象。lens的CRA一般略大于CMOS Sensor的CRA。拍明芯城是快速撮合的元器件交易平台,过去数年已积累了丰富的优势货源。我们聚焦服务元器件长尾客户群,让每一家芯片原厂或分销商的每一款芯片,在Design In、Design Win和流通中更高效,帮助工程师的方案选型、试样及采购,为电子产业供需略尽绵薄之力。
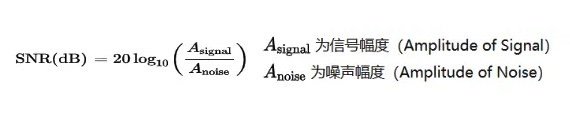
16、信噪比(SNR)
信噪比主要决定于入射光的亮度级(事实上,在亮度很低的情况下,噪声可能比信号还要大)。所以,信噪比应该将所有的噪声源都考虑在内,有些资料中常常忽略散粒噪声,而它恰恰是中、高信号电平的主要噪声来源。CMOS sensor的数据手册一般都会提供信噪比参数SNR,如下所示。信噪比的典型值为45~55dB,若为50dB,则图像有少量噪声,但图像质量良好;若为60dB,则图像质量优良,不出现噪声,信噪比越大说明对噪声的控制越好。这个参数关系地图像中噪点的数量,信噪比越高,给人感觉画面越干净,夜视的画面中点状的噪点就越少。

17、光谱响应特性(Spectral Response Characteristic)
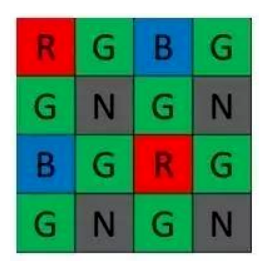
CMOS图像传感器的信号电压Vs和信号电流Is是入射光波长λ的函数。光谱响应特性就是指CMOS图像传感器的响应能力随波长的变化关系,它决定了CMOS图像传感器的光谱范围。18、色彩滤波阵列(Chroma)常见的色彩滤波阵列:RGGB:一个红光、一个蓝光、两个绿光滤波器。每个像素只能感应一种颜色的光,但是当对外输出的时候,需要知道这个像素的RGB值,就只能通过周围像素去计算,这个计算和转换是靠ISP去完成的,进而得出这个像素的RGB的值。这样每个像素虽然只感应了一种光,但是每个像素经过处理后传输到外面后就是有RGB的信息了。这些原始的感光数据成为RAW data。
RCCC:75% 为透射,其余 25% 为只感受红光的滤波器。RCCC 的优点是光灵敏度高,适用于弱光环境。由于 RCCC 只有红色光滤波器,因此主要用在对于红色标识敏感的场合,比如交通灯检测。
RCCB:50% 为透射,其余红光蓝光滤波器各占 25%。RCCB 的弱光敏感性比 RCCC 稍差,但分辨色彩的能力更好,采集的图像既可以用于机器分析,也可以用于人眼观察。
Mono:100% 透射。Mono不能分辨色彩。Mono 配置的弱光灵敏度最高,仅用于对颜色无识别要求的场合,如驾驶员状态检测等。
RGB NIR:把RGGB中的一个G换成了NIR。
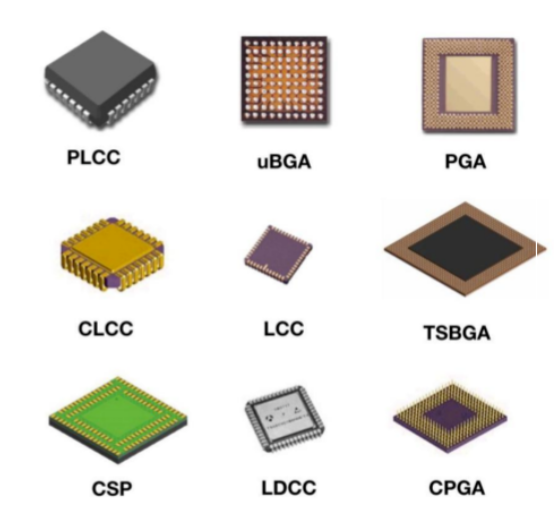
19、封装(Package)
CSP: 芯片级封装,芯片感光面被一层玻璃保护,CSP对灰尘点要求相对低点 sensor表面如果还有灰尘点可以返工修复,制程设备成本较低、制程时间短,但是光线穿透率不佳、价格较贵、高度较高、背光穿透鬼影现象。COB: 将裸芯片用导电或非导电胶粘附在互连基板上,然后进行引线键合实现其电连接。COB可将镜片、感光芯片、ISP以及软板整合在一起,封装测试后可直接交给组装厂,但是制作过程中容易遭受污染,对环境要求较高,制程设备成本较高、良品率变动大、制程时间长,无法维修等。

BGA: 球形触点陈列,表面贴装型封装。球柵网格阵列封装.
LGA: 平面网格阵列封装.
PGA: 插针网格阵列封装.Fan-out:扇出晶圆级封装。
PLCC:带引线的塑料芯片载体.表面贴装型封装。
20、串扰(Crosstalk)
串扰有两种成分:光学串扰(Optical Crosstalk)和电学串扰 (Blooming)。光学串扰成分来源于漫射光或对角度敏感的片上微透镜阵列。不考虑电学串扰成分的前提下,波长较长的光发生光电转换生成信号电荷的区域较深,可能会扩散到相邻的像素。减少该类电荷扩散的方法,包括:
20.1、在保持表面对红光光谱响应率的条件下,使有效光电转换深度变浅。例如,使用正向偏置n型衬底。
20.2、在像素间加入隔离区。例如,对于CMOS图像传感器可以采用更高渗杂度的p型隔绝区包围光电二极管区域。对于小像素来说,通常会制作片上微型透镜以增加灵敏度。微型透镜能将入射光线汇聚到光电二极管区域的中心上,因此也能减少串扰。
21、曝光时间(Exposure Time)
曝光时间越长,图像传感器接收到的光照时间越长,亮度也会越高。
22、增益(Gain)
增益指的是信号放大的倍率。增益通常分为数字增益和模拟增益,大部分CMOS同时具有这两种增益,每种增益可以独立调节倍数,例如4×的模拟增益和2×的数字增益,最终效果是两个相乘。由于增益放大信号的同时,也会放大噪声,因此并不是越高的增益越好,需要综合场景进行考虑,特别是机器视觉的使用场景下,高噪声容易带来误报,反而影响效果。
23、色彩模式(Color Mode)
色彩模式分为黑白(Mono),彩色(Color)两种类型。彩色模式的传感器大多数采取Bayer形式的数据格式,Bayer格式的数据需要进行色彩还原,最左上的2x2或者2x1区域定义为Bayer格式,如RGGB或RG。
24、功耗(Power)CMOS传感器通常比CCD传感器具有更低的功耗。这是因为CMOS传感器的每个像素单元都有自己的转换威廉希尔官方网站 ,可以独立工作,只有在需要时才会被激活。而CCD传感器需要额外的电荷传输器件来逐行传输电荷,因此消耗更多的功耗。25、性价比(Price Quality)无论是CMOS或是CCD,市场在售的图像传感器的价格比全定制图像传感器要低得多。如果非要定制,除非变化很小,那么定制CCD图像传感器的价格一般低于定制CMOS的价格。
①、汽车图像传感器选型
除了以上通用的选型准则,不同的行业应用有着不同的要求,下面我们一起来探讨为汽车应用选择图像传感器时最重要的考虑因素。
1、分辨率
你不一定要最高的分辨率,因为这些数据会给处理系统带来负担,并减慢反应时间。
考虑你的应用是否需要识别车道线或前方100米处的行人——我们发现在交通应用中,1080p分辨率是一个很好的中间点。这种分辨率可以很好地了解周围的世界,而且,即使是10个摄像机系统,你的处理器也可以对收到的数据做出很好的反应。
2、像素大小
这与感光度有关。像素大小通常会被忽略,它决定了图像感应在黑暗中捕获光线的能力。我们有几个传感器可以在昏暗的月光下使用,像素大小足够大,您可以很好地捕获图像。
3、高动态范围
这使传感器可以同时看到明暗区域。想想在桥下开车的例子。图像传感需要能够看到桥前,桥下和桥外的场景。桥下可能是黑暗的,桥的前后可能是亮的。高动态范围感应使您能够准确地捕获所有数据。
4、帧速率
这是指传感器每秒可以输出多少帧。尽管有时会要求每秒60帧,但大多数视频数据使用的帧速率为每秒30-40帧。帧速率和分辨率密切相关,并影响需要处理的数据量。
5、彩色滤光片阵列
这项技术可设置对颜色(或光的波长)的敏感度。它指的是传感器中像素的色度和特异性,并指示每个像素对光波长的特异性。正在开发新的彩色滤光片阵列以改善传感器的响应能力。
6、减轻LED闪烁
这就是传感器如何管理环境中的闪烁光。例如,此功能可将帧捕获与场景中的外部LED同步,例如在停车灯处。这项技术可通过信号灯的LED自动调整图像传感器的定时。
7、全局快门
这是一种同时捕获图像传感器中所有像素的快门。它对于眼睛跟踪和驾驶员监控应用特别重要。与滚动关闭相比,这是一个不同的图像捕获过程。
②、机器视觉图像传感器的选型
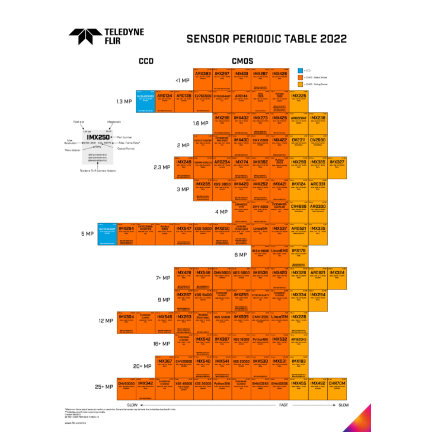
机器视觉应用中,一般帧频>50fps,拍摄距离短,生产环境光强可控,曝光时间较短,一般采用全局快门图像传感器,除特殊应用外,动态范围60dB可以满足大多数机器视觉的要求。在高速自动化生产线上应用的机器视觉产品,对帧频要求都在150-300fps之间。由于机器视觉产品用量较大,对于芯片的价格有较高的要求。机器器视觉传感器的选型有什么方便快捷的技巧吗?
Teledyne FLIR将目前可用的机器视觉传感器用颜色编码整理成一张便于理解的周期表,从分辨率、像素尺寸、帧率和光学格式等各个维度的传感器技术规格进行横行和纵向对比,方便工程师们一目了然的进行快速选型,达到事半功倍的效果。此表涵盖超过100种常用的机器视觉传感器品类,包括第三代Sony Pregius、第四代Sony Pregius S、e2v、onsemi、OmniVision、CMOSIS和GPixel,而且在视觉上区分了CCD、CMOS卷帘快门和CMOS全局快门传感器。
图像传感器供需,欢迎常来 拍明芯城元器件商城https://www.iczoom.com/ 看看
审核编辑 黄宇
-
一文读懂接近传感器2018-11-07 0
-
一文读懂霍尔传感器2018-11-09 0
-
请问图像传感器sensor怎么选型?2019-04-29 0
-
一文读懂DS18B20温度传感器及编程2021-07-06 0
-
一文读懂传感器的原理与结构2022-01-13 0
-
CMOS图像传感器,CMOS图像传感器是什么意思2010-03-02 2929
-
CCD图像传感器,CCD图像传感器原理什么?2010-03-27 5766
-
一文读懂流量传感器2016-10-19 4608
-
CMOS图像传感器正迎来新一轮的产业成长高峰2019-07-03 3336
-
一文读懂气体传感器是什么2021-05-18 6291
-
CMOS图像传感器与MCU选型2021-10-26 933
-
一文读懂纳米传感器2023-03-08 2491
-
一文读懂红外传感器2023-04-07 2148
-
一文读懂汽车芯片—图像传感器芯片2023-07-06 1312
-
盘点图像传感器选型八大要点2024-12-02 190
全部0条评论

快来发表一下你的评论吧 !
