

用HMI-Board 复刻 X-Track
描述
这个项目是B站上很多人做过的项目
源项目是 https://github.com/FASTSHIFT/X-TRACK
首先我们要先了解专案构成架构发展,相关代码在
路径 Software/X-Track
要经过一番学习个人觉得最需要注意下面两个路径
Software/X-Track/Simulator/LVGL.Simulator/HAL
Software/X-Track/USER
Simulator/LVGL.Simulator/HAL
本来是给PC 模拟用的 HAL 基于HMI-Board目前只有LCD,并且使用RT-Thread 基本上能直接对接
USER
可以看出是基于 Arduino 开发的程序,对我们来说现在有了RTduino支持也可能快速的接入了
我的复刻 https://github.com/KunYi/duino-hmi-board branch: X-Track
只验证 env/scons 编译,用ubuntu 22.04 系统安装的arm-none-eabi toolchain
支持VSCode with Cortex-Debug/PyOCD 除错
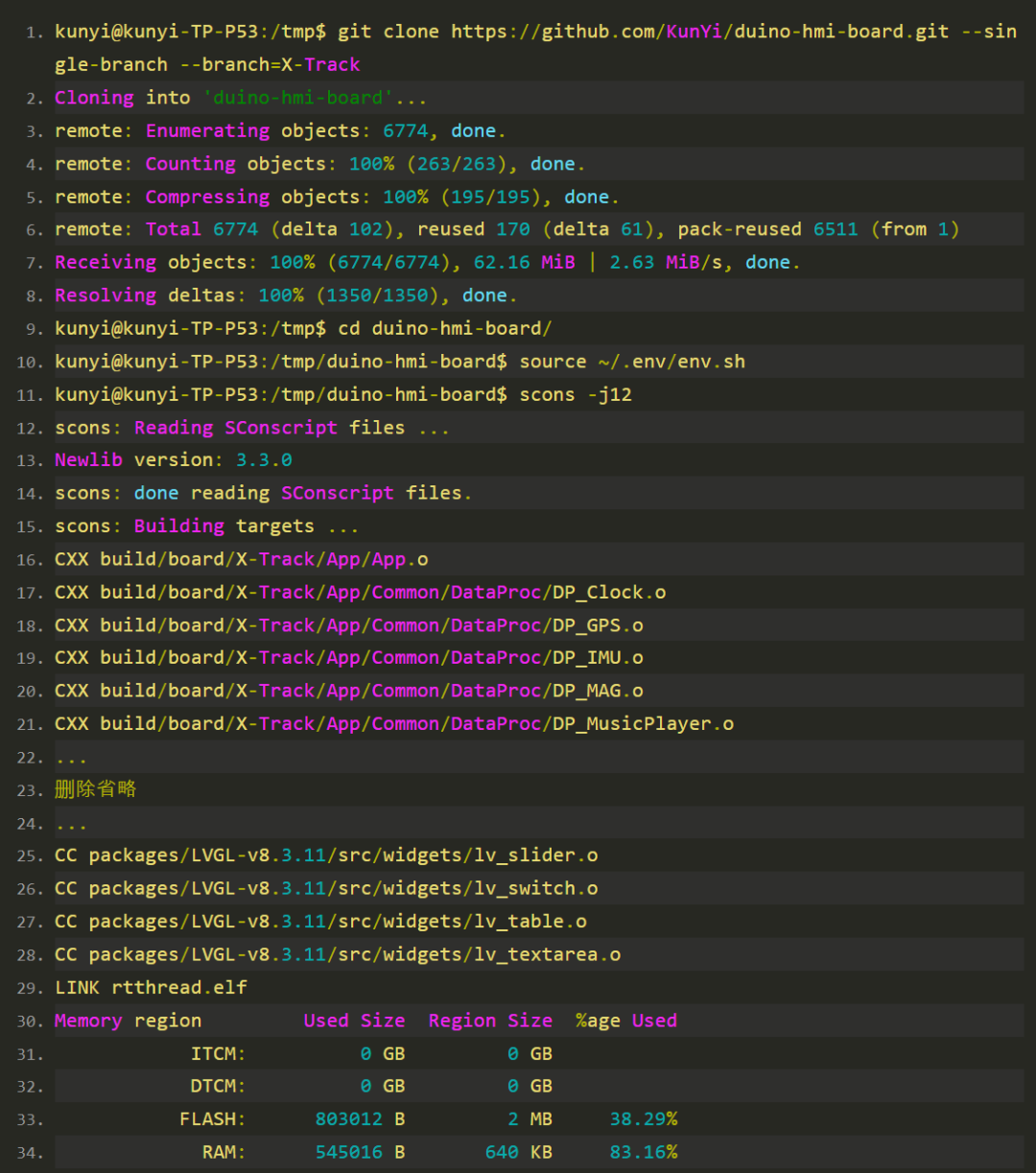
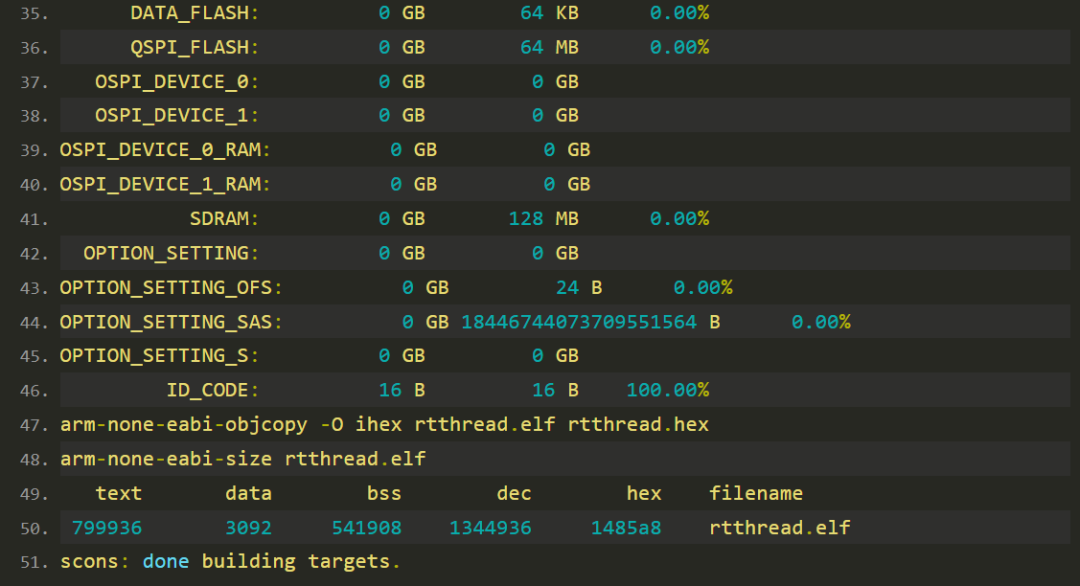
编译步驟
按照下面步骤拉取git repos与进行编译方式
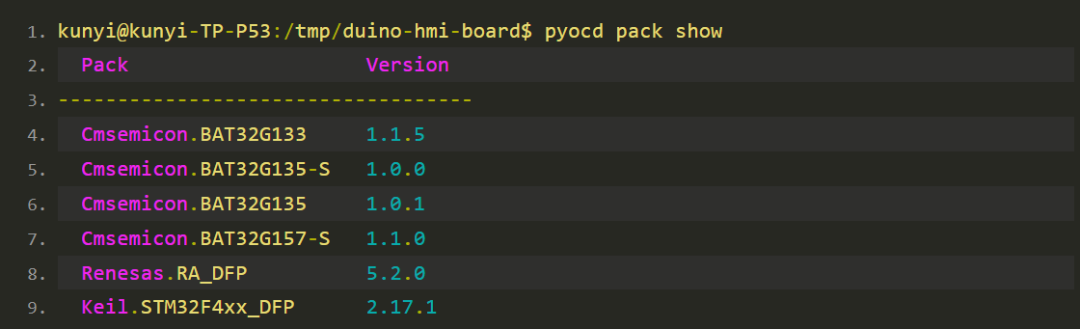
刷新firmware
pyocd 需要有安装好 Renesas RA_DFP
可以用 pyocd pack install 安装,或是用 pyocd pack show 检查安裝
如下安装了 STM32F4xx & Renesas.RA_DFP
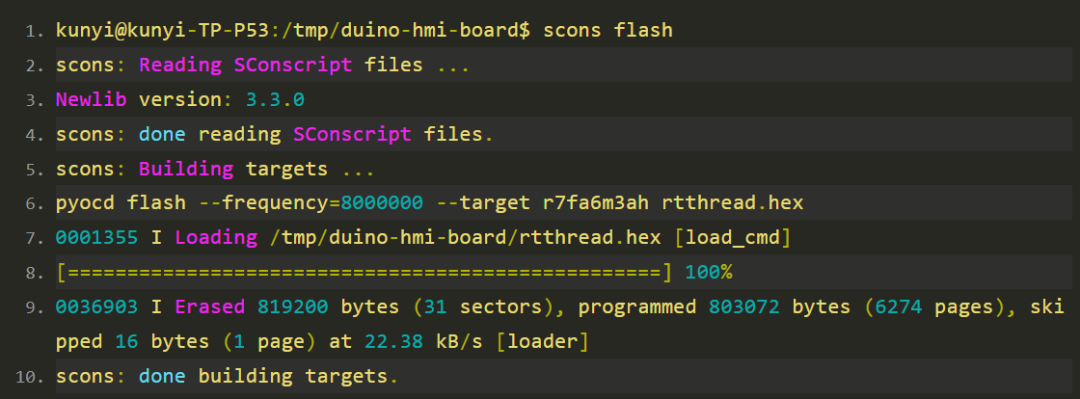
这样我修改了 SConstruct 加进了 flash 命令支持
也使用VSode Cortex-Debug 配置pyocd 用来侦错
展示

用模拟的版本视频
目前已知问题
使用OnChip RTC 系统出现异常,反应过慢,目前使用Software RTC
调整LVGL Thread Stack 从原来4096到8192可以修复
提示
需要修改 board/X-Track/App/Config/Config.h 内部
修改预设GPS起始,当没有GPS信号,有一个设置的起始地点
CONFIG_GPS_LONGITUDE_DEFAULT
CONFIG_GPS_LATITUDE_DEFAULT
修改为false 切换为 GCJ-02 座标系
CONFIG_MAP_USE_WGS84_DEFAULT
切换起始地图放大级
CONFIG_LIVE_MAP_LEVEL_DEFAULT
地图载入路径, 目前是 /MAP
CONFIG_MAP_DIR_PATH_DEFAULT
-
HMI Expansion Board R0K50564MB001BR 用户手册2023-05-15 209
-
怎么解决HMI-Board在调试4bitSDHI挂载文件系统失败的问题呢?2023-08-07 685
-
瑞萨RA6M3 HMI-Board Video Demo 上手指南2023-09-15 1777
-
使用DAPLink在对HMI-Board进行固件烧录,栈溢出如何解决?2024-09-27 0
-
【复刻】X-TRACK码表过程飞起的小鹏 2022-01-20
-
【开源自行车码表】X-TRACK——这可能是你见过最强的DIY自行车码表2021-07-26 0
-
限量预售|2D加速、JPEG硬解、超高性价比M4芯片,您的图形评估利器——HMI-Board来啦!2023-05-16 1338
-
联合发布 | 2D加速、JPEG硬解、超高性价比M4芯片,您的图形评估利器——HMI-Board来啦!2023-05-19 1513
-
基于HMI-Board的智能宿舍空调管理系统设计案例2023-07-31 1419
-
HMI-Board开发板工程在添加新组件时LVGL组件会报错的解决办法2023-09-13 1551
-
基于HMI-Board开发板的多参传感器串口屏设计2023-09-18 847
-
【直播预告】HMI-Board Windows322023-11-14 493
-
Renesas HMI Board挑战赛—FSP工具使用2023-11-22 1235
-
【直播预告】基于RT-Thread & LVGL RA6M3 HMI-Board儿童益智学习机2023-11-30 582
-
RA6M3 RT-Thread* LVGL HMI Board开发实践指南-GPIO实践2023-11-30 1294
全部0条评论

快来发表一下你的评论吧 !
