

为何无人机领域广泛采用PX4作为核心控制平台
描述
在众多无人机类型中,四旋翼因其具备垂直起降、稳定性强、结构相对简单等特点而得到广泛应用。目前,无论是学术界还是工业界,关于四旋翼的研究都在不断深入,关于四旋翼的拓展运用不断增加。因此,学习与研究四旋翼相关的技术有着良好的实用价值。

3D视觉工坊御风250整机实物图
学习四旋翼,首先必须具备一个良好的实验平台
对于初学者,由于缺乏经验,往往难以合理地选择与搭配各个模块,容易忽略主次。例如,对于机架,首先要考虑的就是强度,因为这直接关乎无人机的振动,而振动影响传感器数据质量,数据质量影响最终的控制效果;其次要考虑的是是否安装方便,例如有的无人机使用圆形碳纤管作为机臂,这样很难将电机安装水平,最终也会影响无人机的控制效果。

无人机底部示意图
电机与电调也是至关重要的,廉价的电机电调往往不仅容易烧坏,而且炸机后是否容易轴偏,导致无人机动力不平衡。

电调连接
此外,这些电机电调还有看不到的缺陷,例如响应不够平滑,响应延迟大等。相反,一套优异的动力系统不仅能保证无人机的高性能,还能使用很久,免去维修所用的时间。
除了机架、电机与电调,螺旋桨与电机的匹配,选4S还是6S锂电池等也很有讲究。飞控与传感器更是需要长期使用的经验才能做出合适的选择。
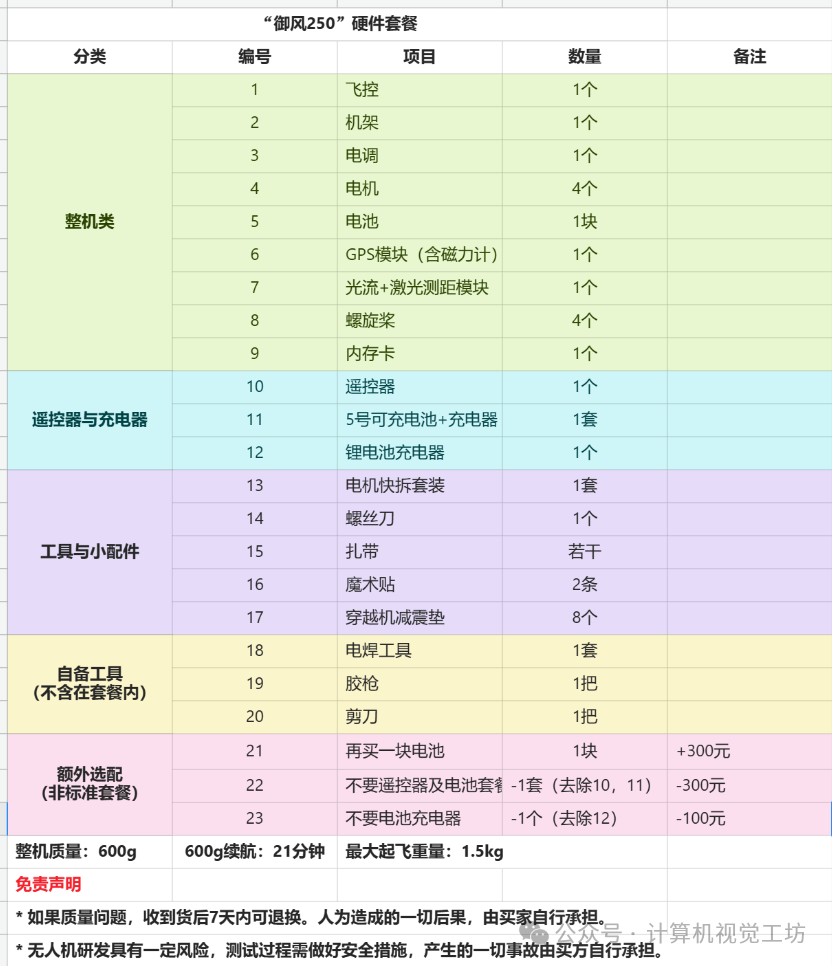
此处针对学习与对科研场景,采用优质飞行套件,推出一个高性能的微型四旋翼平台——御风250。
「御风250」无人机, 「御风250」-四旋翼无人机(基于PX4)[硬件+代码]
御风250具备三大方面的优势,一是模块选型、二是仿真套件、三是课程支持。
首先,御风250通过选择合适的模块,机架采用宽边X型布局,轴距225mm,总质量600g,续航21分钟。御风250支持PX4固件,配备的传感器为IMU、磁力计、气压计、GPS、光流与激光测距模块,支持室内外定点稳定悬停。

光流安装
该无人机的优势见下表:
| 比较项目 | 传统四旋翼 | 御风250 |
|---|---|---|
| 飞控 | 体积大,需要单独安装减震板,安装不方便 | 30*30mm,体积小,质量轻;固定孔安装,自带减震球,安装方便;支持PX4固件,支持二次开发 |
| 机架 | 塑料机架,强度低,振动大,原始值往往1g左右 | 高强度碳纤机架,强度高,振动小,实测振动大约0.2g |
| 电调 | 廉价电调,易损坏,不支持Dshot协议 | 高质量四合一电调,体积小;峰值电流50A,适应瞬时加速;支持Dshot协议,更低延迟 |
| 电机 | 廉价电机,易损坏,响应慢 | 高性能电机,耐炸,响应迅速 |
| GPS | 搜星数量少,定位精度低 | 正常搜星25颗左右,定位精度高 |
| 光流与激光测距 | 光滑地面、强光与弱光常见下定位效果差 | 光滑地面、室外阳光下、晚上室内灯光等情况下依旧能稳定定位 |
| 电池 | 廉价电池,寿命短 | 高质量锂电池,寿命长 |
| 遥控器 | 常规 | 常规+送充电电池套装 |
| 工具 | 无 | 送螺丝刀、电机快拆工具等,方便使用 |
其次,提供该无人机的模型参数与对应的Gazebo仿真环境。
此处提供无人机的质量、转动惯量、油门拉力曲线与升力系数等物理量,拥有这些参数,就可以在仿真环境中搭建对应的无人机模型。
拥有仿真环境,一方面可以验证控制逻辑。通过在仿真环境中测试,消除自身算法逻辑问题,仿真通过再将代码下载到实物平台,有效降低炸机风险。另一方面可以验证控制算法,在新设计一种控制算法时,往往很难知道参数大致为多少,数量级有时都很难确定,通过在仿真环境里调节,降低人力物力成本。其实,当模型参数精度较高时,甚至可以根据理论得到参数的合理范围,极大提高设计效率,实现从理论到实际的跨越。

飞控与GPS安装
最后,从零搭建一套御风250硬件系统,我们为大家配备了配备两门课程。
课程包括仿真课程与实物课程
仿真课程:零基础入门四旋翼建模与控制(MATLAB仿真)[理论+实战]
仿真课程包括理论基础与MATLAB仿真。
实物课程:基于PX4实现的四旋翼建模与控制
实物课程包括三个模块,一是带领学员调试无人机,让飞机稳定地飞起来;二是带领学员学习PX4控制部分的代码,学懂这一大模块的代码,对PX4其他部分代码也能触类旁通;三是带领学员更换新的控制器,使得学员能够将先进的控制算法部署到PX4平台。

整机实物图
-
第三集 知语云智能科技无人机反制技术与应用--无人机的应用领域2024-03-12 0
-
开源项目!DIY了一台无人机,用全志T113芯片2024-10-22 0
-
DIY了一台无人机,用全志T113芯片2024-11-13 0
-
深圳为何能成为“无人机之都”?2016-06-21 0
-
无人机主从式姿态同步控制器设计与仿真2017-04-27 0
-
无人机流行和快速增长背后,对无人机开发平台了解多少?2019-02-21 0
-
无人机飞行控制器威廉希尔官方网站 该怎么设计?2019-10-22 0
-
警用和消防无人机的应用前景广泛2020-05-11 0
-
无人机开发的基础技能体系基础知识2021-08-18 0
-
无人机Rotors入门2021-09-03 0
-
无人机仿真总体概述2021-09-15 0
-
【疯壳·无人机教程2】开源编队无人机-硬件资源简介2022-08-19 0
-
px4平台之我见pdf2018-03-16 982
-
Px4, PJ4, UPD703506, AB050, Application board, AB-050-Px4, V850E/Px4 评估板2023-04-17 247
全部0条评论

快来发表一下你的评论吧 !
