

G-PAL新一代行泊一体系统:以卓越“智价比”重新定义全天候高阶智驾
电子说
描述
当前,高阶智驾的供需关系尚未达到平衡点。
随着智能驾驶功能的不断成熟、消费者接受度提升、成本降低,L2已经成为主要的驾驶辅助方案。据盖世汽车研究院统计,2024年1-3月新能源乘用车市场L2级别(含L2、L2+、L2++)市场渗透率已超过53%。其中,20万以上价格区间车型L2渗透率均已经超过89%以上。未来10万以下车型也将迎来ADAS的增长。
与此同时,以城市NOA为代表的高阶智驾功能加速落地。随着城市NOA需求的爆发,行泊分体的硬件设计将逐步退出市场,更具性价比的行泊一体方案会成为主流。
在智驾渗透率持续提升的趋势下,兼顾“成本可控”和“功能好用”的智驾系统,才是真正值得拥有的高阶智驾。
作为一家硬科技企业,几何伙伴(G-PAL)在推动智驾平权中给出了“解题之法”:基于软硬件一体的解决方案能力,并通过“菜单式交付”的模式,为主机厂和用户带来极具智价比的高阶智驾产品。
除了通过视觉+4D毫米波成像雷达(以下简称为“4D成像雷达”)融合的技术路线显著降低感知系统成本,几何伙伴还提出了“轻量化分段式端到端”理念并将其成功落地——借助高效的轻量化模型架构和算力优化方案,将端到端架构部署至中算力SoC上,为高阶智驾的量产应用探索出了一条新路径。
在智能驾驶技术日新月异的今天,几何伙伴凭借其自主研发的行泊一体解决方案,正引领着行业向更高效、更智能的方向发展。
G-PAL行泊一体智驾解决方案:性能安全与成本平衡的更优解
智能网联汽车的智驾安全问题一直是行业热议的话题。对用户而言,真正安全的智驾,就是要能够保证在复杂路况、极端天气下,车辆能够有足够的反应识别能力和控制响应能力。
而G-PAL行泊一体解决方案能够实现高阶智能驾驶的全天时、全天候运行,其核心便在于独特的视觉+4D成像雷达融合感知系统。其中,视觉传感器提供丰富的纹理和颜色信息,而几何伙伴自研的高分辨率4D成像雷达则拥有出色的测距测速能力和对弱光、恶劣天气环境的适应性,两者相辅相成,共同构建了高精度、高鲁棒性的环境感知模块——这种融合感知技术大幅提升了系统对复杂场景的识别能力。
此外,这一种多传感器融合技术也为行泊一体复用软硬件提供了有力支撑。在泊车时,360°“视觉+4D成像雷达”融合感知系统实现了对车身周围无盲区的感知区域覆盖,因而能够无缝替代传统的超声波雷达,打造环境适应性更强、性价比更高的记忆泊车、自主代客泊车等高阶智驾功能。
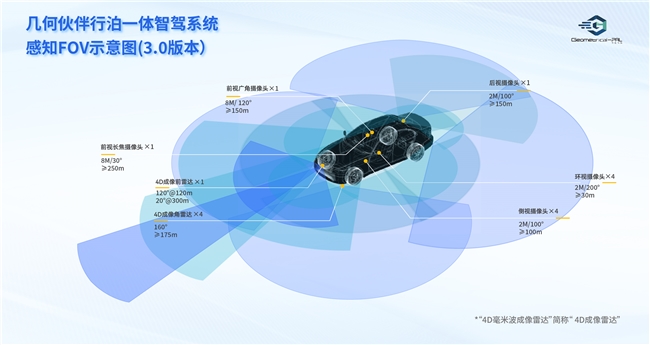
▲几何伙伴行泊一体智驾系统感知FOV示意图(3.0版本)
这套方案不仅代表着几何伙伴在智能驾驶领域的深厚积累,更是对“智价比”这一概念的生动诠释——即基于先进的智能化技术,以“人有我优”的方式,实现产品力与价格的高比值,为用户带来超越期待的驾驶体验。
相较于市场上其他产品,G-PAL行泊一体解决方案在性能与成本上展现出卓越的“智价比”优势,这也是国内首款能够实现全天时全天候城市场景应用的轻图高阶智驾方案。
该系列产品根据硬件配置可划分为7V5R低算力方案、11V5R中高算力方案和面向未来L3/4自动驾驶的高算力方案。
以基于几何伙伴行泊一体3.0系统架构的11V5R中高算力方案为例,这套进阶版行泊一体解决方案面向L2++高阶智驾,以城市NOA为核心功能,基于几何伙伴自研核心算法、高性能域控制器、11V5R传感器配置,可安全高效地应对左右转博弈、人车混行、异形障碍物、鬼探头等复杂城市通行场景。结合360°“视觉+4D成像雷达”融合感知,该系统将智驾应用场景的适用性拓展至全天时、全天候范围,即便在雨雪雾霾等复杂天气下,也能为用户带来优质的驾乘体验。
在3.0系统架构的基础上,几何伙伴已形成Lite、Pro、Max三个版本的领航辅助驾驶方案,可分别实现轻量城区NOA、进阶城区NOA和全场景城市NOA。
几何伙伴这条技术路线以多模态、全天候、低成本、易量产为特色,其核心优势在于能够基于合理的算力消耗和高性价比传感器配置,实现L2++级别的城市NOA、城际NOA、记忆行车、记忆泊车以及代客泊车等一系列功能,而系统成本也更贴近实际需求,让用户在不同级别的车型中都能体验到丝滑流畅的高阶智驾功能。
可见,G-PAL行泊一体智能驾驶解决方案为高阶智驾功能的规模化上车开辟了一条更易落地的技术路径。
轻量化分段式端到端:实现场景理解更精准、决策更拟人的高阶智驾
智能驾驶的性能表现除了受制于传感器的精度与可靠性,还取决于算法优化、算力适配、数据质量这三大底座。
实际上,“端到端”的要义并非盲目追逐高算力或堆砌庞大的模型参数。几何伙伴深谙此道,秉持着面向量产的实用主义,基于市场的真实需求和智驾实际使用条件的考量,选择在主流中算力智驾SoC上高效部署端到端架构,同时嵌入必要的安全冗余设计,旨在为消费者带来超越预期的智驾使用体验,加速智驾能力的迭代进化。
因此,在过去几年中,几何伙伴除了不断挖掘硬件的潜力,还通过先进的算法架构和软件优化能力,开发出一套通用感知端到端、预测决策一体化框架。
这套算法架构把原本基于多个神经网络模型的感知任务,收拢到一张全面互联的感知网络上,极大提升了信息的整合效率和处理的协同性;同时,预测和决策也得以无缝衔接,加之可解释性规划控制,便形成了一张认知网络。通过前后两张网完成所有驾驶任务,这就是分段式端到端。

▲几何伙伴行泊一体智驾系统方案算法架构
●通用感知网络GGPNet(GGPNet,全称G-PAL General Perception Net)
在感知阶段,视觉摄像头和4D成像雷达的数据通过深度学习模型进行融合。这种融合并非是在特征层面上进行简单叠加,而是通过神经网络中的特定融合模块,深度提取和整合来自视觉摄像头的高分辨率图像信息与4D成像雷达提供的点云、方位角、俯仰角、深度和速度信息,实现了数据特征的深度交融。
通用感知网络GGPNet通过Transformer架构中的交叉注意力机制,能够有效处理视觉和4D成像雷达数据之间的复杂关系,尤其是能够融合对小型目标或部分遮挡目标的感知能力,以及捕捉到更细腻的物体表面特征,使得感知系统可以在复杂环境下更精准地进行目标检测、分类和追踪。
几何伙伴GGPNet是国内首个可在量产计算平台上实现视觉+4D成像雷达多模态异构特征融合的感知模型,以一张神经网络即可实现4D成像雷达与相机联合输出多任务结果,形成动、静态环境感知多任务合一。相较于传统方案,GGPNet能显著增强多个感知任务之间的一致性,确保了系统整体性能的提升,同时能够有效降低算力资源的消耗。
具体而言,GGPNet能够执行包括全域通用障碍物检测、在线建图以及交通标志识别等在内的多任务处理,全面提升了系统对周围环境的准确识别与理解能力,为下游的预测决策提供了坚实的感知基础,从而让系统得以从容应对异形障碍物、鬼探头、加塞并线等复杂场景。
●预测决策网络GPDNet(GPDNet,全称G-PAL Prediction Decision Net)
几何伙伴预测决策网络GPDNet可以让车辆的各场景应对表现更为智能,驾驶轨迹与速度规划更拟人化,在复杂场景中的通行也会更加顺畅。
GPDNet创新性地将预测过程和决策过程整合在一个网络模型内,旨在消除常见的智驾方案中预测与决策解耦导致的信息损失与交互缺失。几何伙伴使用同一个模型输出车辆未来状态序列(决策)及推演环境中其他交通参与者的未来状态序列(预测),并通过注意力机制,使预测决策模型的交互博弈能力更强,有效化解传统预测-决策解耦方案存在的诸如响应延迟、前后顿挫等弊端。这一设计显著提升了智驾系统的拟人化表现,大幅提高了通行效率。
此外,可解释性规划控制过程也有力确保了该方案的可落地性,它以大模型输出的多智能体联合策略输出为参考,输出可解释的控制指令,从而确保必要的安全性和合理性。
值得一提的是,几何伙伴GPDNet是业内首个引入4D成像雷达感知结果的预测决策端到端方案,在兼顾系统量产性的同时,也减少了感知-规控的信息损失,进一步提升了分段式端到端方案的性能天花板。
多模态异构信息融合与分段式端到端架构的结合,既确保了高计算效率和低延迟,让系统在毫秒级别内完成感知-决策-执行的闭环处理;同时也让系统的决策规划能力整体增强,不仅能够“预测”,还能执行更为精准的“预判”。此外,这套系统还配备了从硬件到底软再到算法的安全降级策略,严守安全底线。
在先进的感知系统、数据驱动和安全机制支持下,用户可以通过G-PAL新一代行泊一体智能驾驶系统尽享全天候安全智驾。
数据驱动算法迭代,打造越用越聪明的智驾系统
端到端无疑将加速全场景NOA的规模化落地。在此过程中,高质量、多样化的数据积累与分析将是增强端到端场景泛化能力、提升性能体验的关键驱动力。
对此,几何伙伴构建起超千万帧专业级“4D毫米波成像点云+视觉图像”的多模态数据集。其原始数据里程超10万公里,全天时全天候的数据积累涵盖城区、快速道路及高速公路等近千个场景。
这套数据闭环弥补了当前业内此类数据集的空缺,并打通从数据采集到模型部署的闭环链路,打造出高效智能化数据闭环系统,有力支撑算法的快速迭代和场景泛化。

▲几何伙伴数据平台
几何伙伴还建立了智算中心,同时提出基于算力约束和需求驱动的模型分布式训练方法。这种方式能够迅速对采集数据进行4D场景目标的精准自动化标注,与传统训练方法相比,效率显著提升。结合云端高并发、大算力、易扩展的优势,将进一步加速高阶智驾感知、决策、规划和控制等算法的闭环迭代进程。
在数据驱动的迭代模式下,G-PAL行泊一体智能驾驶系统经过车端驾驶数据的打磨,将会愈发贴合用户的驾驶习惯,从而越开越好用、越用越聪明。
高性能行泊一体域控制器:高集成、易拓展设计满足多样化需求
如前文所述,ADAS和部分L2+功能正在向经济型车型渗透,这部分车型的智驾诉求表现为:以更低成本满足用户对更多城市智驾体验的期待。
对此,G-PAL新一代行泊一体解决方案致力于通过极具性价比的软硬件方案以及更合理的算力配置,来满足主机厂和用户的实际需求。
几何伙伴车规级行泊一体域控制器采用高性能SoC,能够处理大量复杂的计算任务,如感知、决策和控制算法等。它支持摄像头、4D成像雷达等多种传感器数据的并行处理和融合,从而确保车辆能够对周围环境进行准确感知并高效处理。该域控制器具备高带宽的数据传输能力和实时操作系统,能够确保各个部件之间实现快速信息交流与实时响应,以从容应对快速变化的交通场景。此外,还结合了软硬件安全冗余设计,确保系统在各种极端条件下的可靠运行。
不仅如此,在软件架构上,几何伙伴域控平台搭载的自研中间件符合功能安全和实时性要求,能够对常见的车载通讯方式进行统一封装,且通讯模块支持安全加密,提高系统的安全性和可配置性。
这些软硬件特性使得几何伙伴车规级行泊一体域控制器能够基于合理算力配置,处理复杂的实时数据和算法,实现高级别的自动驾驶功能,并在性能和可靠性方面达到行业标准。

▲几何伙伴车规级行泊一体域控制器
此外,几何伙伴行泊一体域控制器的硬件架构设计还充分考虑了易拓展性。对于更高价位的车型以及未来系统的功能迭代,这套行泊一体域控制器可拓展算力至200+TOPS,并支持摄像头、4D毫米波成像雷达、激光雷达等多传感器接入,增强安全冗余,提升城市NOA、城际NOA等L2+功能的舒适体验,覆盖从入门级到高算力平台。同时,该架构还提供丰富的总线接口支持,能够轻松接入车载网络,实现与车辆其他系统的无缝集成。
基于传感器、算法、系统架构的协同创新,几何伙伴将以一套感知性能可靠、算法扎实、功能丰富的系统,让智驾产品从“可用、够用的系统”进化为“更聪明的伙伴”。
开箱即用,菜单式交付模式打造全栈可控智驾系统
基于软硬件高度协同的能力和战略布局,几何伙伴可在智驾系统研发的多个环节提供技术解决方案,覆盖感知-决策-控制全链路,并以软硬件技术服务支持的方式深化合作。
这种模式以几何伙伴强大的系统架构能力为基础,支持客户按需选择传感器阵列、域控制器配置并组合定制成最契合自身需求的智驾系统解决方案。如此一来,极大提高了交付的灵活性和效率,同时有效缩短了产品研发周期并降低成本。
为实现“菜单式交付”,几何伙伴实施了模块化设计、标准化接口协议及云端管理平台等一系列技术创新举措,确保模块间无缝集成与高度协同;此外,还提供HIL、SIL测试部署工具链,可进一步提高交付效率与质量。
当前G-PAL行泊一体解决方案已然能够做到“开箱即用”。其中的核心模块“视觉+4D成像雷达”可作为L2+至L4级智驾在极端情况下的托底感知系统,为系统架构设计提供了一种成本效益更高、全天候性能更优、感知精度更准确、泛化能力更强、更易于维护和升级的智驾解决方案。
得益于从研发到量产的全栈可控能力,目前几何伙伴在系统级解决方案上已经与多家主机厂客户展开深度合作。其中,国内多家头部主机厂客户已完成POC验证,2025年将实现该方案的量产落地。
智行四海展宏图,行泊一体辟新路。从G-PAL行泊一体解决方案2.0到3.0的成功落地,再一次有力彰显了几何伙伴的软硬实力。下一步,几何伙伴必将全力以赴,以坚定的步伐加快行泊一体智驾系统从中高端到经济型车型的全面覆盖,围绕更好地平衡性能与成本这一目标,持续打造消费者真正关注、愿意买单的智能驾驶功能,践行智驾平权的使命,引领智能驾驶新时代的蓬勃发展。
审核编辑 黄宇
-
基于4G和Beyond 3G的新一代移动通信系统讨论2019-07-17 0
-
基于双TDA4VM行泊一体方案2022-11-03 0
-
全天候霓虹灯电子变压器威廉希尔官方网站 图2009-06-16 1471
-
盛波尔推出新一代NVX80多功能三技术全天候移动探测器2013-04-27 1510
-
2021 OPPO开发者大会:AON全天候视觉感知2021-10-27 3361
-
OPPO开发者大会2021 colorOS的AON全天候视觉感知服务2021-10-28 12727
-
轩辕智驾携手广汽埃安共同打造全球首创全天候智驾感知方案2022-09-05 741
-
双TDA4VM NOA行泊一体化解决方案2022-11-04 2108
-
最新TDA2x SoC系列支持Vision AccelerationPac,重新定义新一代高级驾驶员辅助系统2022-11-07 317
-
基于单颗地平线征程3,宏景智驾首发单SoC行泊一体解决方案2022-12-29 1083
-
宏景智驾再度联手地平线 首发单征程3行泊一体量产解决方案2022-12-29 823
-
超重载AGV领域全新一代单只载荷20T“神兽级”舵轮-让凤凰动力重新定义“精工制造”2023-03-03 1469
-
禾多科技行泊一体智驾系统在量产车上的实际表现2023-07-18 786
-
行业卷王登场,宏景智驾单征程3行泊一体方案征服高速领航辅助2023-09-27 1022
-
一体化自动气象监测系统:全天候守护,24小时不间断监测2024-11-29 263
全部0条评论

快来发表一下你的评论吧 !
