

高压放大器在软体机器人特性测试中的应用
描述
实验名称:软体机器人特性测试
实验目的:仿尺蠖软体机器人,作为躯干的软体驱动器是整个机器人能运动的核心组成部分,它不仅能提供灵活的运动,而且提供输出力。因此,对软体驱动器的运动性能与输出力的研究是非常有意义的。根据分析,静电吸附脚需要符合要求得切向力和法向力,因此对静电吸附脚的输出性能进行研究是十分必要的。
测试设备:高压放大器、激光位移传感器等。

图:伸长特性测量系统
实验过程:
在进行软体驱动器输出位移特性测试时,搭建伸长特性测量系统。软体驱动器在一个光滑玻璃平台上进行测试,为方便测量伸长特性数据,在系统中固定脚1。使用LABVIEW编程,控制器对高压电源进行控制,激光位移传感器测量机器人脚的伸长量。传感器数据通过控制器传输到电脑中。
首先选取直流激励电压进行测试,信号高电平VA为(0.5kV、1.0kV、1.5kV、2.0kV、2.5kV、3.0kV、3.5kV、4.0kV、4.5kV、5.0kV、5.5kV、6.0kV),低电平VF为0V。通电时长为60s,数据采集时长为100s。使用上述激励信号,对三种拉伸倍率,300%×400%、300%×450%以及300%×500%的DE薄膜进行了实验。如图2所示,拉伸倍率为300%×500%的DE薄膜输出位移性能最好,而且对于不同的拉伸倍率,可看出随着电压的升高,机器人伸长步长均随之呈二次曲线增长。但由于DE薄膜本身的特性,超过6kV恐有击穿的风险。因此,在伸长量测试情况下,最佳激励电压选取为6.0kV。由图可知,在拉伸倍率为300%×500%,输入电压高电平为6.0kV时,仿生软体驱动器在60s的极限输出伸长量为16.2mm。
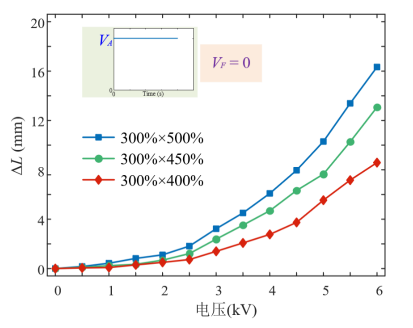
图2:伸长步长与直流电压的关系
本文测试了以高电平VA分别为3.0kV、4.0kV、5.0kV、6.0kV,低电平VF为0V的正弦信号为激励电压,并采用在此四组不同幅值正弦电压下的一系列不同频率(1~30Hz,间隔1Hz)的正弦信号来测试拉伸倍率为300%×500%的DE薄膜制作的仿生软体驱动器伸长性能。
实验结果:
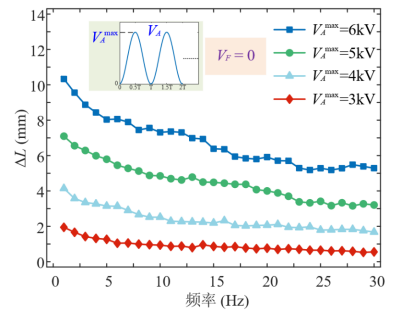
图3:伸长步长随不同正弦幅值与频率的变化关系
上图所示为仿生软体驱动器输出伸长步长数据,该数据为在不同频率下仿生软体驱动器的最大输出步长伸长量。由图中可以看出,在不同电压幅值下,随着频率的升高,机器人的伸长步长整体呈下降趋势。但电压幅值越小,下降趋势越不明显;电压幅值越高,下降趋势越明显的同时波动也越大。因此,当应用需要要求机器人步长更长时,则选取电压幅值更高,电压频率更小的激励信号。在高电平为6kV,频率为1Hz时,驱动器输出步长能达到10.42mm。
电压放大器推荐:ATA-7020

图:ATA-7020高压放大器指标参数
本资料由Aigtek安泰电子整理发布,更多案例及产品详情请持续关注我们。西安安泰电子Aigtek已经成为在业界拥有广泛产品线,且具有相当规模的仪器设备供应商,样机都支持免费试用。高压放大器https://www.aigtek.com/products/bk-gyfdq.html
审核编辑 黄宇
-
高压放大器在介电弹性体折纸术软体机器人中的应用2024-02-27 0
-
模仿蚯蚓开发软体机器人2015-01-19 0
-
放大器的基本特性_高压放大器特性2016-07-25 0
-
软体机器人学习问题探讨2019-08-12 0
-
功率放大器基于振动驱动的旋转及攀爬软体机器人的研究2021-04-09 0
-
功率放大器在驱动介电弹性体机器人的应用2023-02-24 576
-
高压放大器在电子测试中的实际应用2023-05-25 700
-
高压放大器在介电材料测试中的应用2023-06-19 477
-
高压放大器在软体机器人领域的应用2023-10-13 491
-
Aigtek:介电弹性体高压放大器在软体机器人研究中的应用2024-04-25 357
-
安泰ATA-7015高压放大器在机器人测试中的应用研究2024-08-20 284
-
高压放大器在水下扑翼软体机器人研究中的应用2024-12-04 109
全部0条评论

快来发表一下你的评论吧 !
