

网络的功能安全要求
描述
写完关于机器人、协作机器人和移动机器人(功能安全与人工智能 )的功能安全要求的博客之后,我认为谈谈网络的功能安全要求会很有意思。这两个主题是相互关联的,因为大部分机器人都会联网,机器人是工业4.0的重要组成部分。
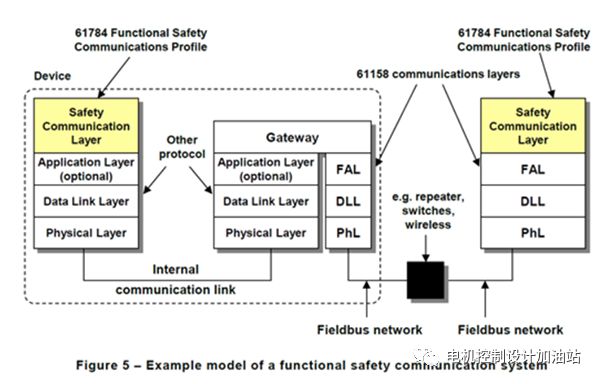
IEC 61508中提到网络的地方不多,仅IEC 61508-2:2010第7.4.11条提供了一些指导,其中提出了白通道和黑通道方法,并让用户参阅IEC 61784-3或IEC 62280系列。使用白通道方法,包括两端通信设备在内的整个网络都按照相关功能安全标准进行开发。这将涉及到很多工作,并且会限制标准网络组件的使用。更常用的方法是使用黑通道,关于通道不做任何假设,通过应用软件中的附加SCL(安全通信层)来处理安全事宜。此SCL是按照安全标准开发的,但通信系统中的其他部分完全是标准组件。下图摘自IEC 61784-3标准。
IEC 61784-3是现场总线标准,IEC 62280系列(也称为EN 50159)涵盖了列车。EN 50159给出了一系列威胁,并列出了针对这些威胁的可能防御措施。对于每种威胁,SCL必须实施至少一项防御措施,参见下文。
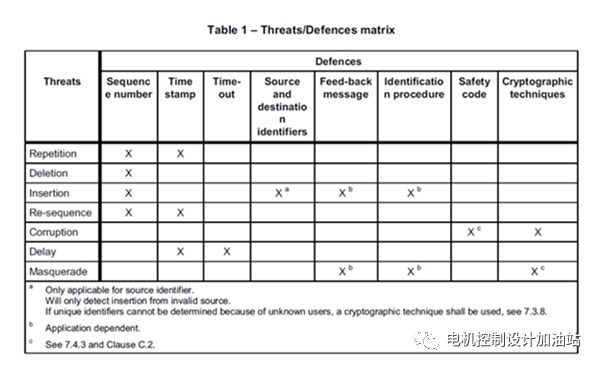
为了机器的安全,超时防御措施特别值得关注。它有效地实现了一个看门狗定时器,因此,假如一个机器人没有收到通信,那么经过指定的时间间隔之后,它就会将机器人置于安全状态。
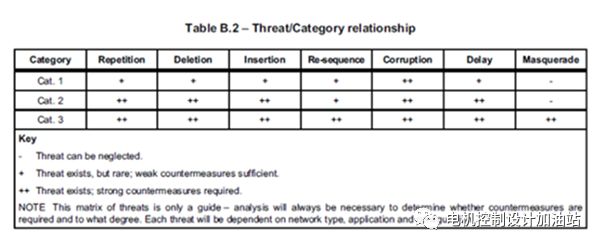
另外,EN50159的表B.2很有意义。它列出了各种类型的网络,并将每种威胁标识为可以忽略、需要某种保护或需要强有力的对策。1类网络可以被认为是机器人或协作机器人内部的封闭网络,或者可能是模数转换器与本地微控制器之间的接口。1类网络具有已知且固定的最大用户数量,未授权访问的机会有限。另一方面,3类网络比如可能无线网络之类的东西,与有线网络相比,这类网络通常具有更多未授权访问的机会。
白通道方法并未广泛使用,但我不知道诸如TSN(时间敏感网络)等新要求是否会改变这一点。这很适合作为未来博客的一个主题。
我努力寻找与功能安全和网络相关的优秀视频——这次比平常更难找到。
-
音频、视频及类似电子设备安全要求2012-08-17 0
-
高空作业平台常见的安全要求与措施的验证2015-09-10 0
-
功能安全与网络2018-10-30 0
-
功能安全与安防2018-10-30 0
-
约旦LED灯性能、安全要求及能效测试内容2018-11-14 0
-
怎样去满足ADAS应用程序的特殊安全要求?2021-07-19 0
-
电器设施设备配置安全要求说明2021-09-09 0
-
SoC平台安全要求1.02023-08-02 0
-
逆变器的工作原理和安全要求2010-06-02 633
-
混合动力电动汽车安全要求2016-09-27 1059
-
电子产品的安全距离及其相关安全要求2016-12-17 906
-
什么是功能安全?如何满足功能安全要求?2019-07-01 7514
-
TDK针对高安全要求的应用推出基于3D HAL®技术的带冗余功能的位置传感器2021-11-19 981
-
智能家居应用的连接和安全要求2022-10-26 1157
-
MCU如何满足ISO26262提出的安全要求2023-02-03 534
全部0条评论

快来发表一下你的评论吧 !
