

三相无刷舵机将会逐渐成为发展主流
电子说
描述
人形机器人正在带动机器人舵机的发展,至去年以来,机器人舵机是越做越小,对技术的要求越来越高,最新的趋势是三相无刷舵机将会逐渐成为发展主流,它的寿命将是有刷电机的三倍以上,而且工作效率可提高50% 以上。
传统有刷电机的缺陷,已不满足机器人技术快速发展的需求,我们经常遇到的问题是换相容易产生高温之电弧、火花、金属屑,而且寿命短、体积大,不容易控制,对机器人企业而言,最重要的是舵机返修贵。
从市面上的人形机器人返修情况来看,大多问题出自在舵机上,如齿轮崩牙磨损,导致手部、腿部关节无法转动;马达阻抗一致性差,导致耗电加剧,损坏驱动器件等等。
在用户看来,舵机的不稳定性,经常导致机器人失足,重心不稳,或舵机摆动幅度过大,导致关节部位卡住无法定位,这些都是不可接受的。
因此,我们需要更强的舵机去支撑人形机器人的高强度运作,***晶致半导体股份有限公司(以下简称:晶致半导体)新推出的三相驱动芯片很好的解决了这些问题。
晶致半导体应用工程师陈韦缙说:“晶致半导体三相驱动芯片AM2885提供了有力的心脏并塞进了极小的空间 LGA(4.5mm * 4.5mm)的封装内。我们保留了所有传统分离组件的优势(内阻极小达到 80mΩ以下),并将它成功的微型化,再赋予新的灵魂(如 current limit function、TSD、死区保护…等新的架构),让原本过时的电机驱动更能符合未来机器人舵机上的方案及应用。”
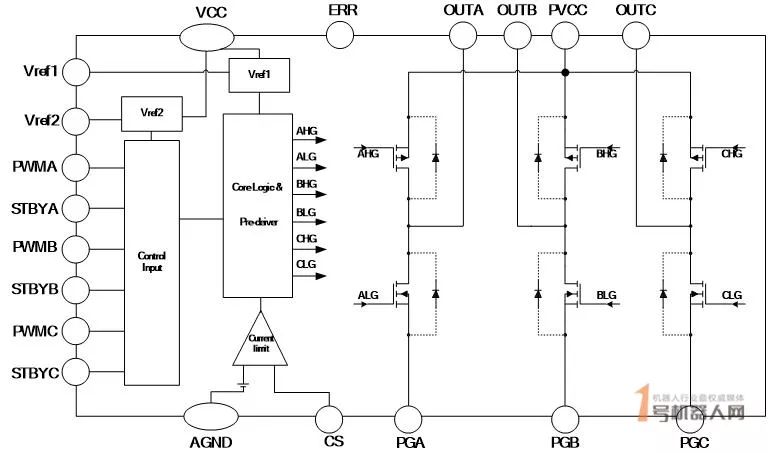
图:晶致半导体三相驱动芯片架构
晶致半导体等于是高度整合了驱动芯片,涉及技术包含:低导通电压、超低内阻、内置死区时间、过流、过温保护机制等。AM2885芯片可以提高输出能力,降低无效功率的产生,并降低芯片本身的表面温度;而且内置死区时间为0.5微秒,在舵机的高精度运作下,做到精准定位控制,所以机器人动作顺畅不会延迟。
陈韦缙说:“原先舵机驱动电流约1A,但机器人本身的重量以及对性能的要求日益渐增,在机器人运动的过程中,舵机的持续驱动电流会提升至3-5A,如果采用AM2885芯片,不但可以支撑更高性能的电流持续输出(3-6A),还因封装缩小(4.5mm * 4.5mm),进而将PCBA的面积缩小,大大简化了系统的设计难度,从而达到舵机微型化及多功能化的目的。”
在机器人舵机发展不断微型化的过程中,晶致半导体AM2885芯片给机器人舵机注入新的灵魂,让小型化舵机更有作为。这也符合人形机器人技术发展的趋势,接下来人形机器人发展也可实现微型化,让更小型的人形机器人陪伴在我们的身边,方便携带。
高整合度的芯片不但能降低工厂生产时的返工率,还能提升器件的稳定性,大幅缩短研发的时程,这对机器人企业而言,今后在人形机器人的制造上可以缩短时间,也能提供更有保障性的产品。
-
三相无刷直流驱动IC型号推测2013-02-25 0
-
三相无刷直流电机控制求教?2016-12-15 0
-
三相无刷电机驱动,三相无刷调速电机,三相无刷落地扇电机2017-11-24 0
-
GC4931三相直流无刷驱动2021-07-20 0
-
如何去消除三相无刷直流电动机的干扰现象2021-08-09 0
-
怎样去驱动一个三相无刷直流电机2021-11-15 0
-
新日本无线推出三相DC无刷电动机控制NJW43032010-03-19 1286
-
三相无刷直流电机原理和控制方法2021-09-15 2602
-
三相无刷直流电机2021-09-16 2337
-
三相无刷直流电机的调制方式2021-10-27 11223
-
三相直流无刷在冰柜散热领域的应用2022-01-14 2788
-
三相无刷直流电机驱动器参考设计2022-09-08 1759
-
UM1946_三相无刷直流马达驱动入门2022-11-22 347
-
三相无刷直流电机原理2023-03-15 6957
-
变频无刷电动机的三相波形和三相交流电一样吗?2023-12-20 949
全部0条评论

快来发表一下你的评论吧 !
