

在光纤电信系统中 控温如何把握
电子说
描述
在光纤电信系统中,激光二极管用作发送信号的发射激光器,以及掺铒光纤放大器(EDFA)和半导体光放大器(SOA)的泵激光器。在这些应用中,激光器的特性(包括波长、平均光功率、效率和消光比)必须保持稳定以确保电信系统的整体性能良好。然而,这些特性取决于激光器的温度:只要温度发生漂移,波长就会改变,转换效率将会降低。要求的温度稳定性介于±0.001°C至±0.5°C,具体数值视应用而定。
为了控制温度,需要一个由热敏电阻、热电冷却器(TEC)和TEC控制器组成的环路。热敏电阻的阻值与温度成比例变化(反比或正比,取决于热敏电阻类型),当配置为分压器时,可利用它来将温度转换为电压。TEC控制器将该反馈电压与代表目标温度的基准电压进行比较,然后控制流经TEC的电流,从而调整TEC传输的热量。
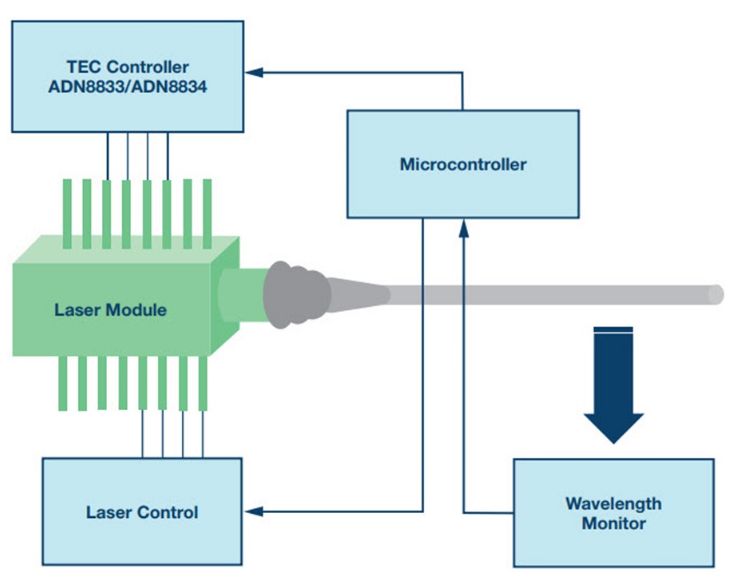
图1. 激光模块的温度控制系统
上述系统的一般框图如图1所示。激光二极管、TEC和热敏电阻位于激光模块内部。TEC控制器ADN8833或ADN8834读取热敏电阻的反馈电压,并向TEC提供驱动电压。使用微控制器监测和控制热环路。注意,热环路也可以在模拟威廉希尔官方网站 中构建。ADN8834内置两个零漂移斩波放大器,可将其用作PID补偿器。
本文将说明电信系统中激光二极管热控制系统的组成,并介绍主要器件的关健规格。本文的目的是从系统角度阐述各项设计考虑,为设计人员构建一个具有良好温度控制精度、低损耗、小尺寸的高性能系统提供全局性指南。
TEC:热电冷却技术
热电冷却器包括两片表面陶瓷板,其间交替放置P型和N型半导体阵列,如图2所示。
图2. 带散热器的TEC模块
当电流流经这些导体时,热量将在一端吸收并在另一端释放;当电流方向相反时,热传输也会反向。该过程称为珀尔帖效应。N型半导体中的载流子是电子,因此,其载流子和热量从阳极流向阴极。对面的N型半导体具有空穴载流子,热量也沿相反方向流动。
取一对P-N半导体对,用金属板将其连接起来,如图3所示;当电流流过时,热量将沿一个方向传输。
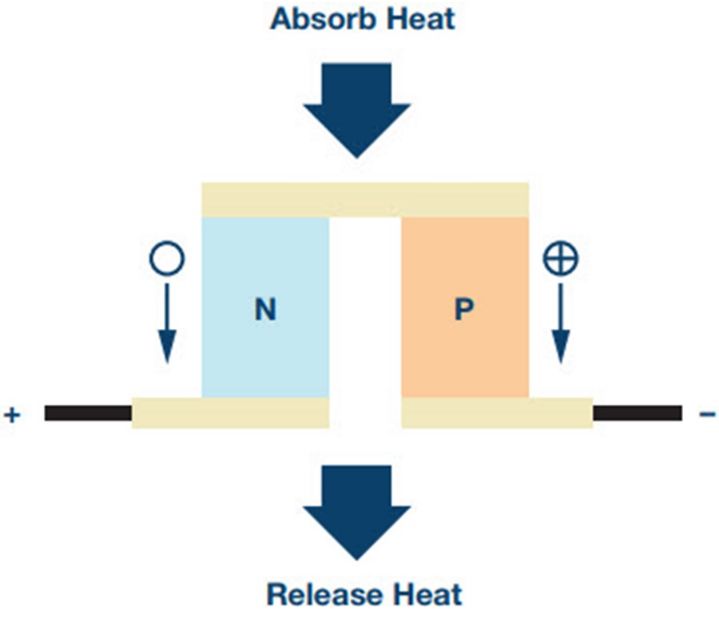
图3. 珀尔帖效应:P-N半导体对的热流
改变直流电压的极性可改变热传输方向,传输的热量与电压幅度成比例。由于既简单又鲁棒,热电冷却被广泛用于电信系统的热调理。
如何选择TEC模块
选择TEC模块时,需要考虑系统中的许多因素,如环境温度、对象目标温度、热负荷、电源电压和模块的物理特性等。必须认真评估热负荷,确保所选TEC模块有足够的容量来将热量从系统泵出以维持目标温度。
TEC模块制造商在数据手册中通常会提供两条性能曲线。一条曲线显示电源电压范围内不同温差(ΔT)下的热传输容量,另一条曲线显示电源电压和ΔT的不同组合所需要的冷却/加热电流。设计人员可以估计模块的功率容量,确定它能否满足特定应用需要。
TEC控制器操作和系统设计
为了利用TEC补偿温度,TEC控制器应能根据反馈误差产生可逆差分电压,并提供适当的电压和电流限值。图4为ADN8834的简化系统框图。主要功能模块包括温度检测威廉希尔官方网站 、误差放大器和补偿器、TEC电压/电流检测和限值威廉希尔官方网站 、差分电压驱动器。
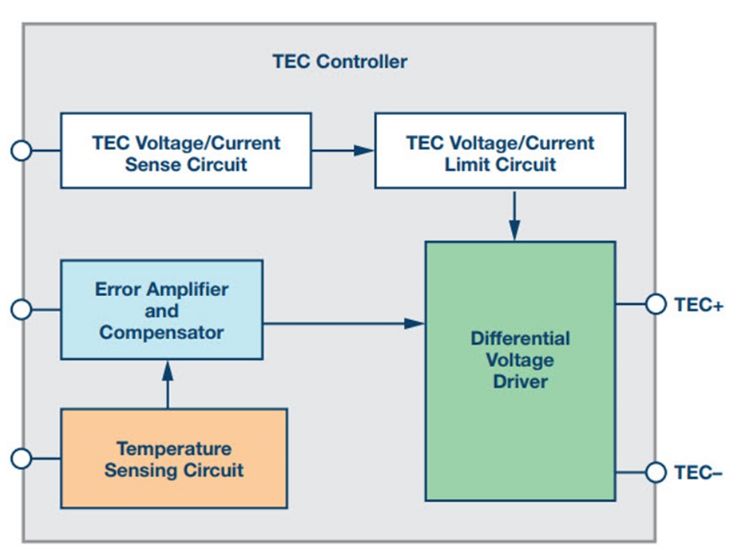
图4. 单芯片TEC控制器ADN8834功能框图
差分电压驱动器
TEC控制器输出一个差分电压,使得通过TEC的电流可以带走连接到TEC的对象的热量,或者平稳地变为相反极性以加热该对象。电压驱动器可以是线性模式、开关模式或混合电桥。线性模式驱动器更简单且更小,但效率不佳。开关模式驱动器具有良好的效率——高达90%以上——但输出端需要额外的滤波电感和电容。ADN8833和ADN8834使用混合配置,含有一个线性驱动器和一个开关模式驱动器,体积较大滤波元件的数量减半,同时能够保持高效率性能。
电压驱动器设计对控制器至关重要,因为它占用了大部分功耗和威廉希尔官方网站 板空间。优化的驱动器级有助于最大程度地缩减功率损耗、威廉希尔官方网站 尺寸、散热器需求和成本。
如何利用NTC热敏电阻检测温度
图5显示了负温度系数(NTC)热敏电阻在温度范围内的阻抗。由于它与温度具有相关性,因此可将其连接为分压器,从而将温度转换为电压。
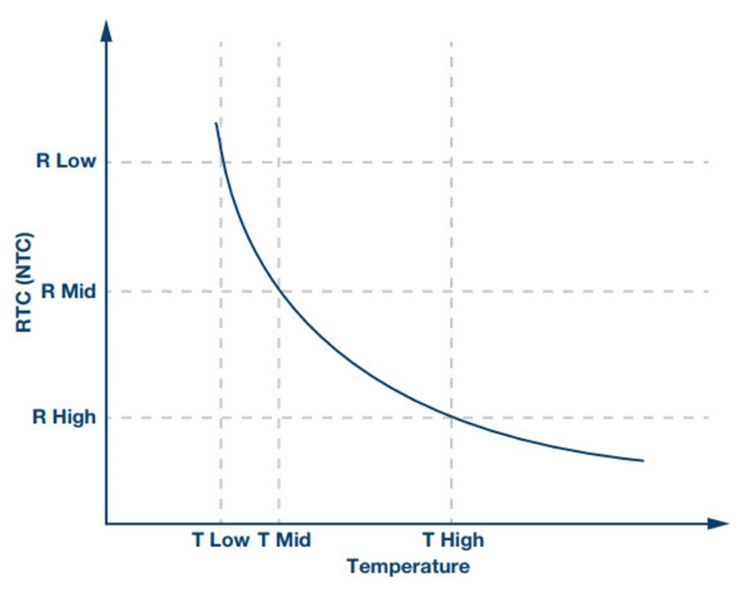
图5. NTC阻抗与温度的关系曲线
典型连接如图6所示。当RTH随温度而变化时,VFB也会变化。
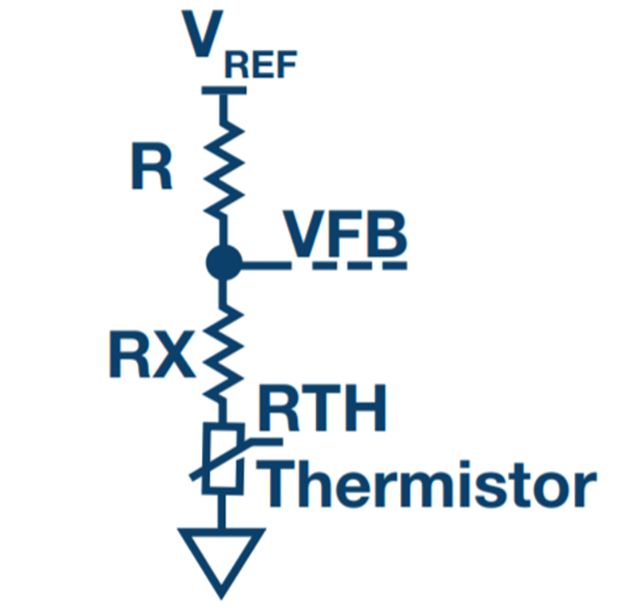
图6. NTC热敏电阻连接为分压器以将温度转换为电压
增加一个Rx与热敏电阻串联,便可相对于VREF将温度电压传递函数线性化,如图7所示。必须将其与模块壳内部的激光器紧密耦合,隔绝外部温度波动影响,使其能精确检测温度。
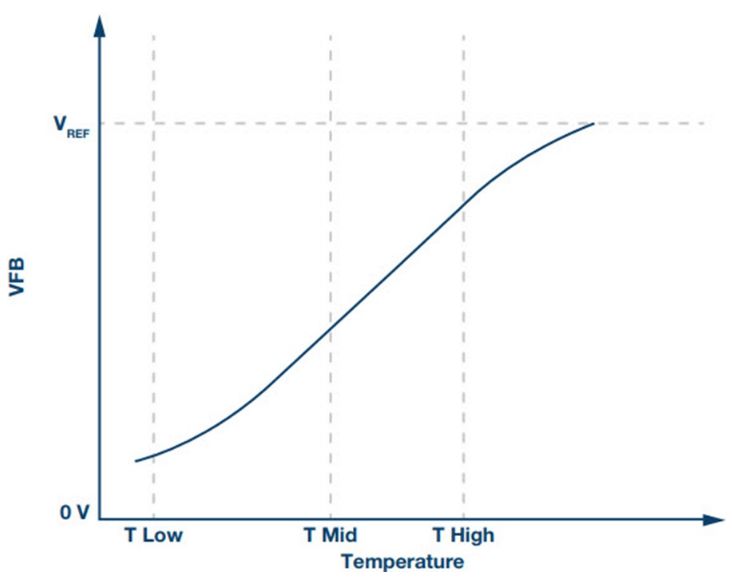
图7. VFB与温度的关系
误差放大器和比较器
模拟热反馈环路包括两级,由两个放大器构成,如图8所示。第一个放大器接受热反馈电压(VFB),将该输入转换或调节为线性电压输出。此电压代表对象温度,馈入补偿放大器中,与温度设定电压进行比较,产生一个与二者之差成比例的误差电压。第二个放大器通常用来构建一个PID补偿器,后者包括一个极低频率极点、两个不同的较高频率零点和两个高频极点,如图8所示。
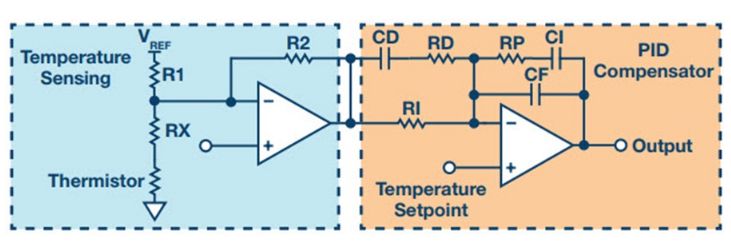
图8. 使用ADN8834内部两个斩波放大器的热反馈环路图
PID补偿器可通过数学方法或经验方法确定。要从数学上模拟热环路,需要TEC、激光二极管、连接器和散热器的精确热时间常数,这不太容易获得。利用经验方法调谐补偿器更为常见。通过假定温度设定端具有某个阶跃函数并改变目标温度,设计人员可以调整补偿网络,使TEC温度的建立时间最短。
激进补偿器会对热扰动快速作出反应,但也很容易变得不稳定,而保守补偿器建立得较慢,但能耐受热扰动,发生过冲的可能性更小。系统稳定性和响应时间之间必须达到平衡。
TEC控制器系统的关键性能TEC控制器系统的关键性能
有时候,即便PID补偿器设计得当,稳态误差仍会存在。下面是引起该误差的几个因素。
TEC热功率预算:设计该系统时,TEC和电源电压是最先选定的事情。然而,由于热负荷不容易估计,选择可能不正确。某些情况下,若将最大功率应用于TEC但仍不能达到目标温度,可能意味着热功率预算不足以处理热负荷。提高电源电压或挑选具有更高功率额定值的TEC可解决这个问题。
基准电压源一致性:基准电压源会随温度和时间而漂移,对于闭合热环路,这通常不是问题。但是,尤其是在数字控制系统中,TEC控制器和微控制器的基准电压源可能有不同的漂移,引起补偿器不会察觉的误差。建议这两个威廉希尔官方网站 采用相同的基准源,用具有较高驱动能力的电压覆盖另一电压。
温度检测:为使温度误差最小,精确检测负载温度非常重要。任何来自反馈的误差都会进入系统,补偿器同样不能纠正这种误差。使用高精度热敏电阻和自稳零放大器可避免误差。热敏电阻的布置也很重要。确保将它安装到激光器上,以便能够读取我们要控制的实际温度。
效率
TEC控制器的大部分功耗是由驱动器级消耗的。在ADN8833/ADN8834中,线性驱动器的功耗可根据输入至输出压降和负载电流直接得出。开关模式驱动器的损耗较为复杂,大致可分解为三部分:传导损耗、开关损耗和转换损耗。传导损耗与FET的RDSON和滤波电感的直流电阻成比例。选择低电阻元件可降低传导损耗。开关损耗和转换损耗高度依赖于开关频率。频率越高,损耗越高,但无源元件尺寸可减小。为实现最优设计,必须仔细权衡效率与空间。
噪声和纹波
ADN8833/ADN8834中的开关模式驱动器以2MHz频率切换,快速PWM开关时钟沿包含很宽的频谱,会在TEC端产生电压纹波,并且在整个系统中产生噪声。增加适当的去耦和纹波抑制电容可降低噪声和纹波。
对于开关模式电源常用的降压拓扑,电源电压轨上的纹波主要由PWM FET斩波的断续电流所引起。并联使用多个SMT陶瓷电容可降低ESR(等效串联电阻)并在局部给电源电压去耦。在开关模式驱动器输出节点,电压纹波由滤波电感的电流纹波引起。为抑制此纹波,应在驱动器输出端到地之间并联使用多个SMT陶瓷电容。纹波电压主要由电容ESR与电感纹波电流的乘积决定:ΔV_TEC = ESR × ΔI_L并联使用多个电容可有效降低等效ESR。
-
母线槽光纤测温系统超温报警2024-04-10 433
-
基于光纤传输的延时系统设计2013-10-08 0
-
光纤跳线电信级和网络级相关知识2017-10-09 0
-
简论光纤传感器在测量技术中的应用2018-11-13 0
-
光纤在太阳能系统中的应用有哪些?2021-05-21 0
-
WiFi光纤无线电信号分布系统具有什么优势?2021-05-27 0
-
光纤在应用中的损耗2010-08-26 1608
-
电信运营商如何在变革中把握机遇?2013-07-01 2248
-
光纤线在通信系统应用中具备哪些优势2022-08-16 2963
-
光纤通信系统简介2023-06-06 2164
-
光纤连接器在各行业中的应用2023-06-28 1217
-
感温光缆和感温光纤的区别2023-07-07 2010
-
光纤信号传播采用什么原理?光纤传输的是电信号还是光信号?2023-09-07 4810
-
电信光纤猫怎么设置上网 电信光纤猫和联通光纤猫能通用吗?2024-02-19 5242
-
光纤耦合器在通信系统中的应用2024-08-09 1343
全部0条评论

快来发表一下你的评论吧 !
